Consideration of communication in human–machine interaction for cooperative trajectory planning
Julian Schneider, Balint Varga, Sören Hohmann

TL;DR
This paper explores how communication between humans and machines at the trajectory layer can improve cooperative systems by enabling emancipated cooperation through communication loops.
Contribution
The paper introduces a novel graph-based representation for human–machine cooperation that reveals communication loops necessary for emancipated cooperation.
Findings
Emancipated cooperation is possible via three variants of communication loops at the trajectory layer.
A consensus on a common trajectory can be achieved in each communication loop variant.
Cooperative strategies at the trajectory layer enhance the performance of human–machine systems.
Abstract
Interactive human–machine systems aim to significantly enhance performance and reduce human workload by leveraging the combined strengths of humans and automated systems. In the state of the art, human–machine cooperation (HMC) systems are modeled in various interaction layers, e.g., the decision layer, trajectory layer, and action layer. The literature usually focuses on the action layer, assuming that there is no need for a consensus at the decision or trajectory layers. Only few studies deal with the interaction at the trajectory layer. None of the previous work has systematically examined the structure of communication for interaction between humans and machines beyond the action layer. Therefore, this paper proposes a graph representation based on a multi-agent system theory for human–machine cooperation. For this purpose, a layer model for human–machine cooperation from the…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
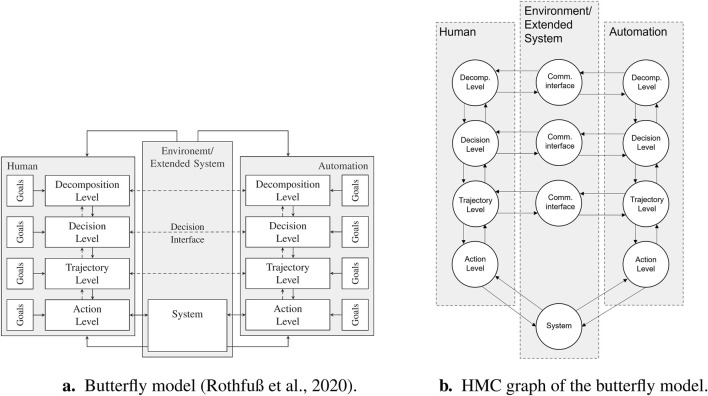 Figure 1
Figure 1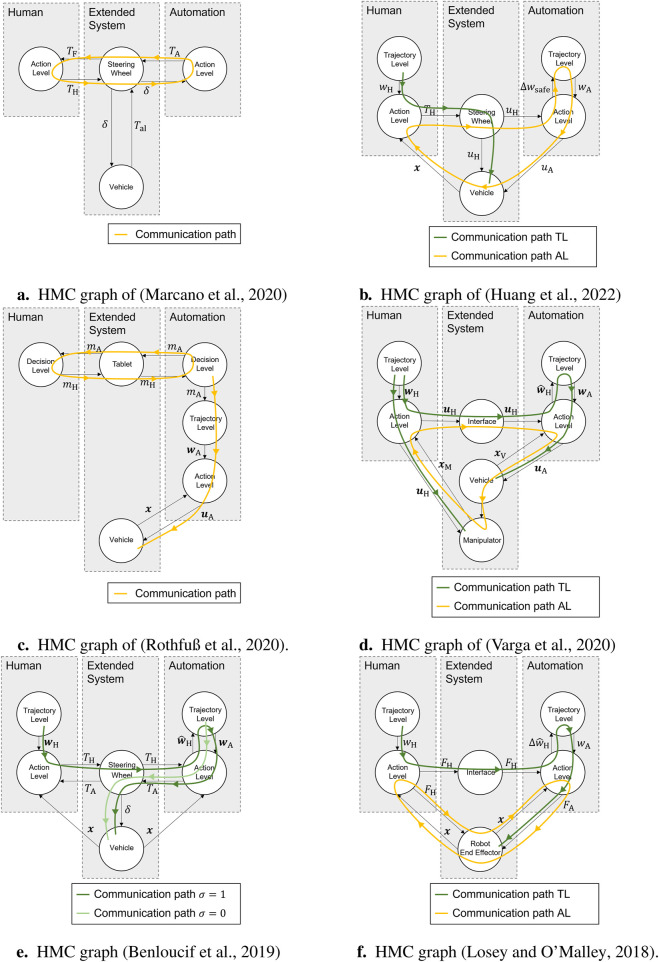 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4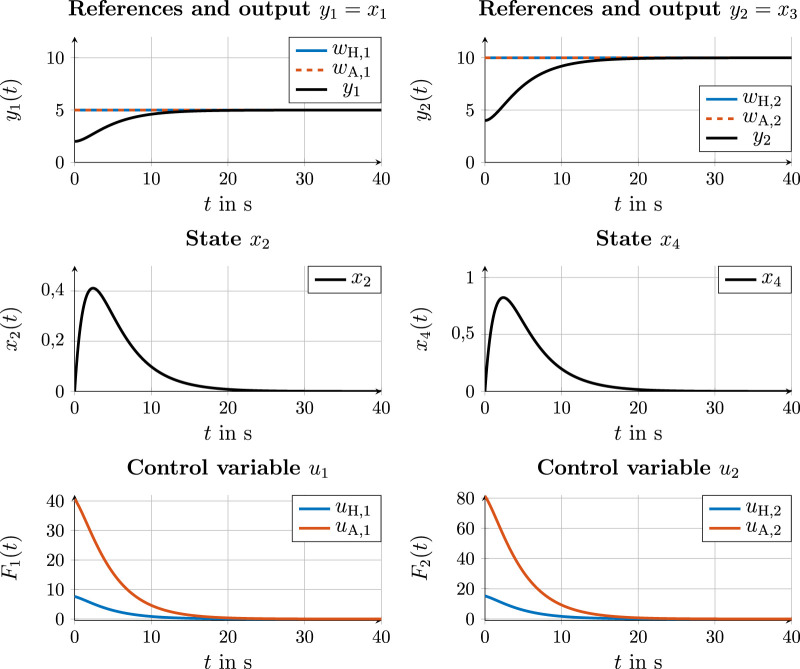 Figure 5
Figure 5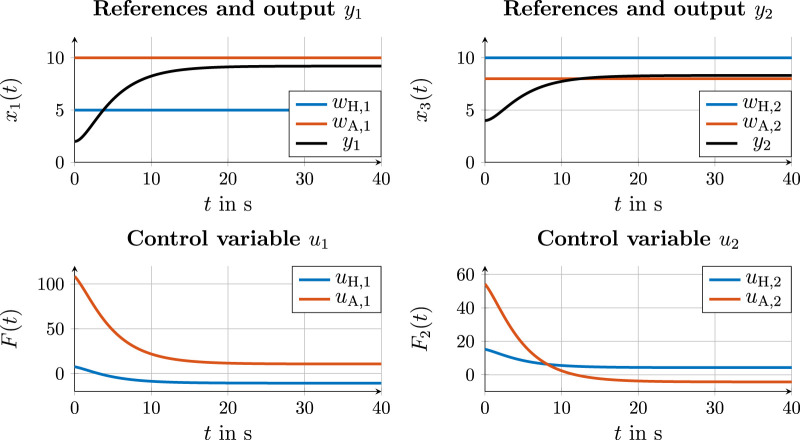 Figure 6
Figure 6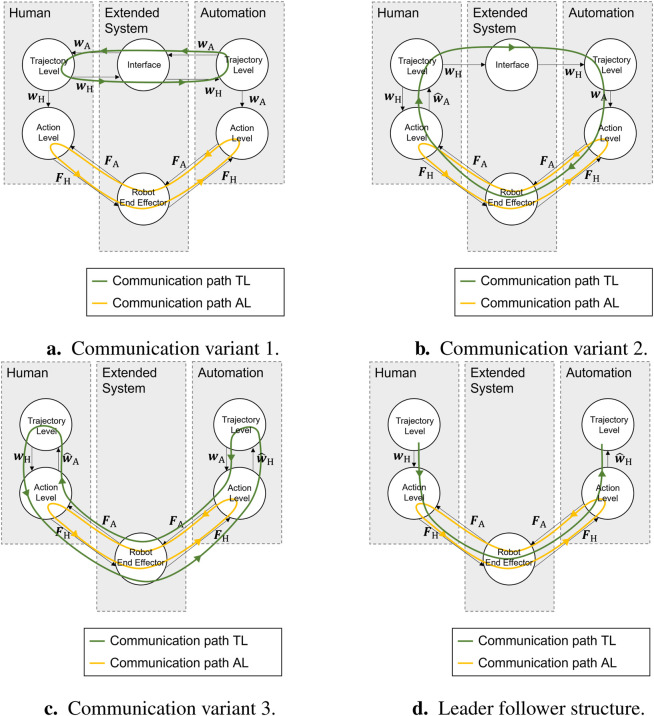 Figure 7
Figure 7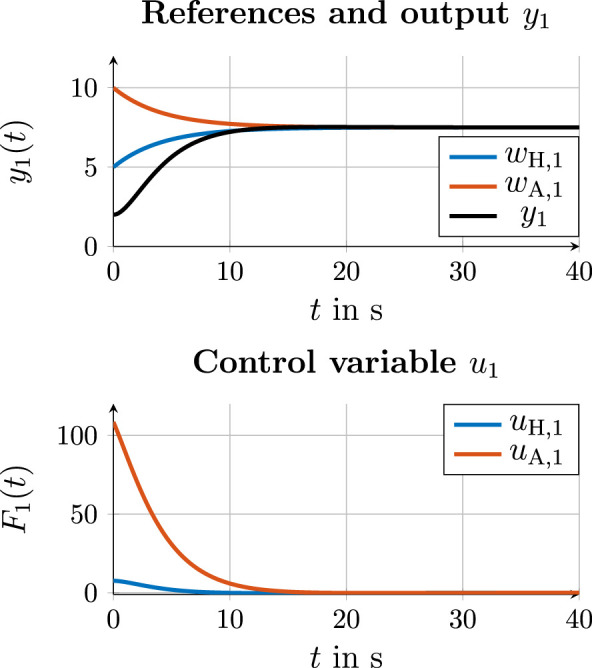 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobot Manipulation and Learning · Human-Automation Interaction and Safety · Teleoperation and Haptic Systems