Learning computer-aided manufacturing from demonstration: a case study with probabilistic movement primitives in robot wood carving
Daniel Schäle, Martin F. Stoelen, Erik Kyrkjebø

TL;DR
This paper explores using robot learning from human demonstrations to create custom manufacturing operations, specifically in robot-assisted wood carving.
Contribution
The paper introduces a pipeline integrating probabilistic movement primitives into a CAD environment for skill-informed toolpath generation in wood carving.
Findings
A pipeline was developed to translate 2D drawings into 6-DOF carving toolpaths using ProMPs in Grasshopper.
Human demonstrations of carving cuts were successfully modeled and used to generate toolpaths.
The approach shows potential for augmenting CAM tools but requires iterative adjustments for accuracy.
Abstract
Computer-Aided Manufacturing (CAM) tools are a key component in many digital fabrication workflows, translating digital designs into machine instructions to manufacture physical objects. However, conventional CAM tools are tailored for standard manufacturing processes such as milling, turning or laser cutting, and can therefore be a limiting factor - especially for craftspeople and makers who want to employ non-standard, craft-like operations. Formalizing the tacit knowledge behind such operations to incorporate it in new CAM-routines is inherently difficult and often not feasible for the ad hoc incorporation of custom manufacturing operations in a digital fabrication workflow. In this paper, we address this gap by exploring the integration of Learning from Demonstration (LfD) into digital fabrication workflows, allowing makers to establish new manufacturing operations by providing…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1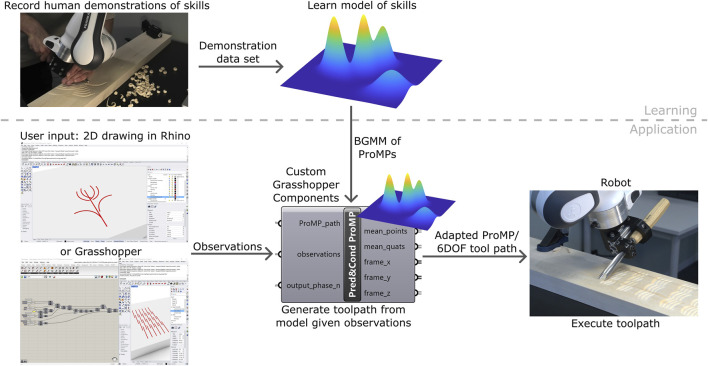 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4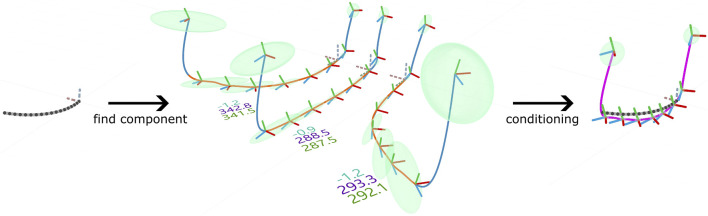 Figure 5
Figure 5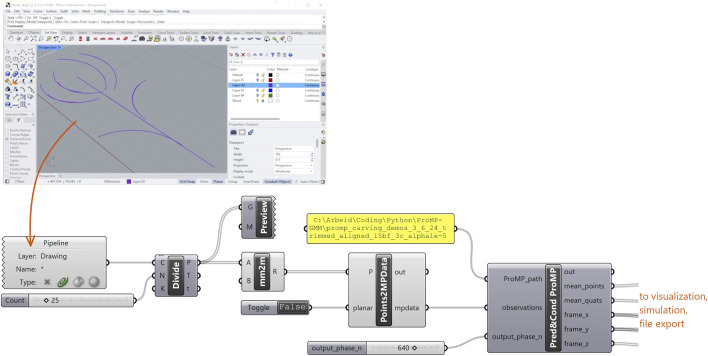 Figure 6
Figure 6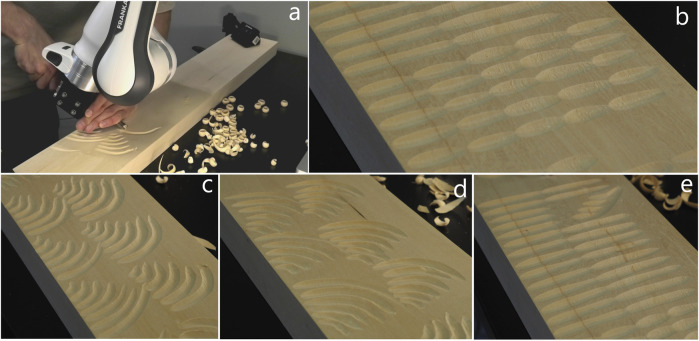 Figure 7
Figure 7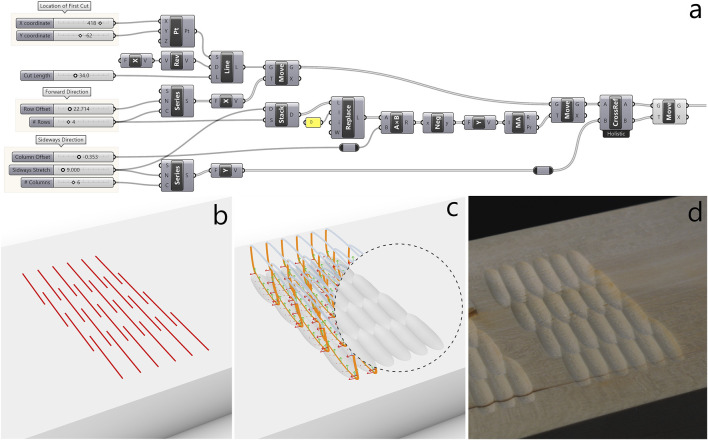 Figure 8
Figure 8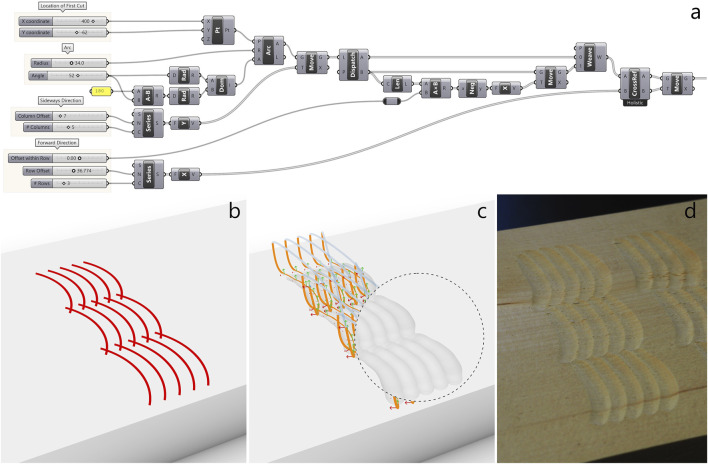 Figure 9
Figure 9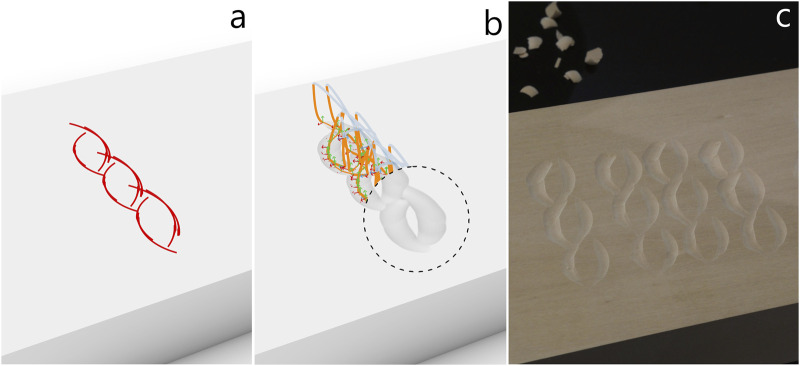 Figure 10
Figure 10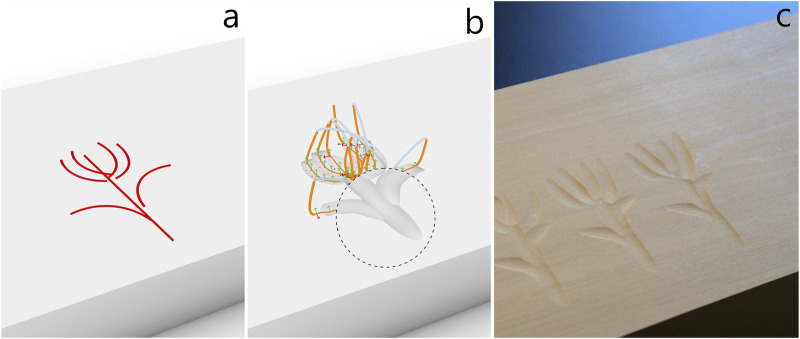 Figure 11
Figure 11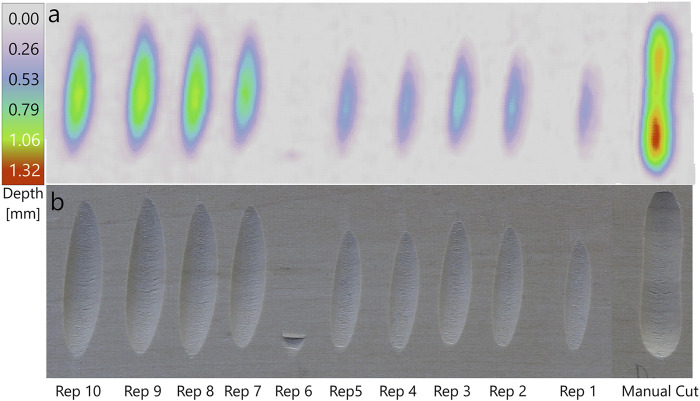 Figure 12
Figure 12 Figure 13
Figure 13 Figure 14
Figure 14Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobot Manipulation and Learning · Manufacturing Process and Optimization · Innovations in Concrete and Construction Materials