Prioritized Multi-task Motion Coordination of Physically Constrained Quadruped Manipulators
Aizhen Xie, Xuewen Rong, Guoteng Zhang, Yibin Li, Yong Fan, Zhi Li, Teng Chen

TL;DR
This paper introduces a new motion coordination framework for quadruped robots with manipulators to handle complex tasks efficiently.
Contribution
A novel motion coordination framework using multi-task prioritization and null-space projection for quadruped manipulators.
Findings
The framework adapts to three prioritized tasks including trajectory tracking and constraint satisfaction.
Experiments show the robot achieves end-effector tracking with less than 3 cm error.
The method is validated through both simulation and physical robot testing.
Abstract
Quadruped manipulators can use legs to mimic legged animals for crossing unstructured environments. They can also use a bionic arm to execute manipulation tasks. The increasing demands for such robots have pushed research progress. However, there remain challenging works in their usage of a high degree of freedom. To solve this redundant problem, we propose a novel motion coordination framework based on multi-task prioritization and null-space projection. The framework can adaptively generate optimal motion for different parts of the robot considering 3 prioritized tasks. The tasks include end-effector trajectory tracking, motion redistribution to meet physical constraints, and manipulability enhancement. The motion is then executed by a whole-body controller incorporating dynamics, inverse kinematics, multiobjective priorities, and force constraints. Experiments both in simulation and…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
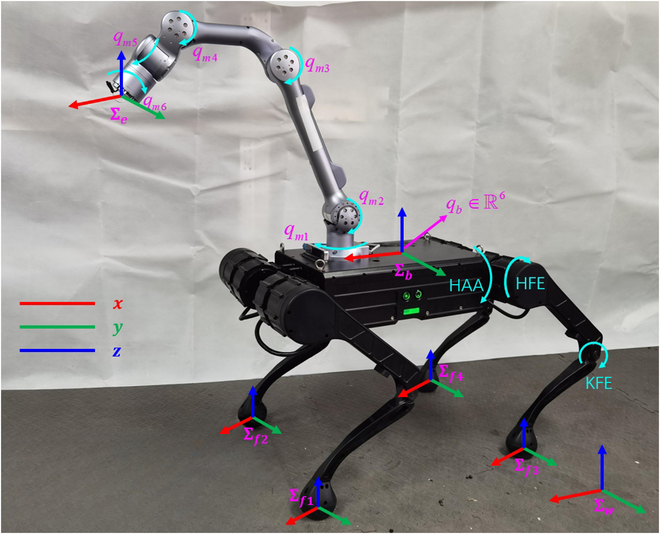 Figure 1
Figure 1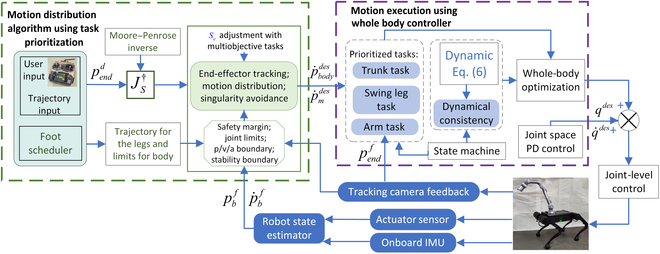 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4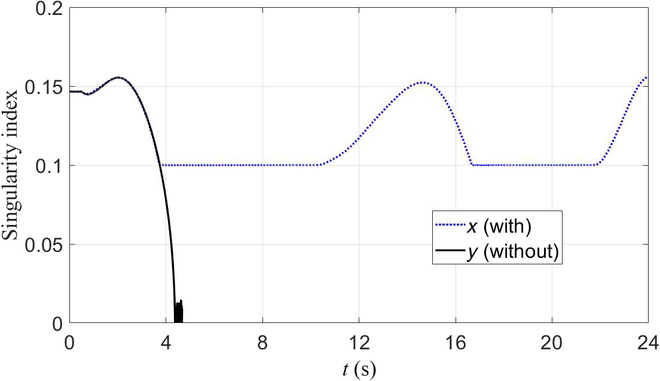 Figure 5
Figure 5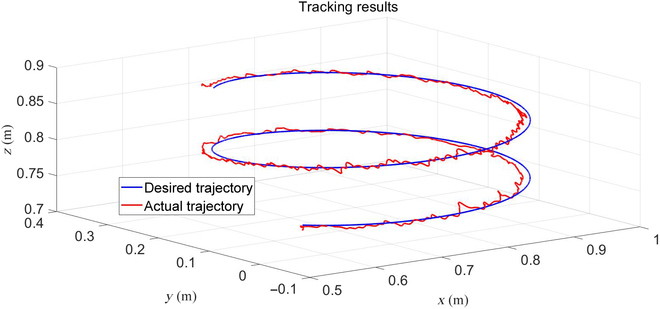 Figure 6
Figure 6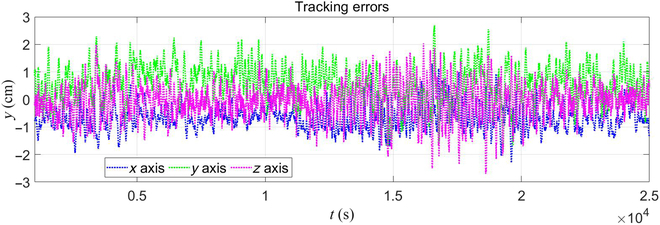 Figure 7
Figure 7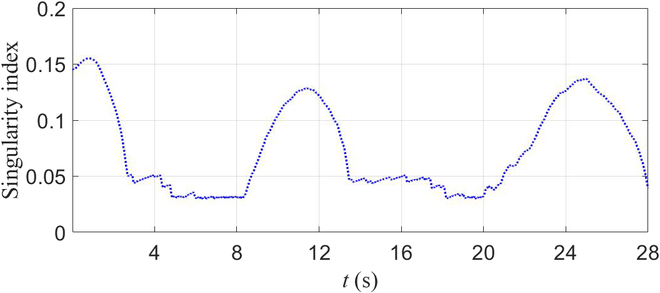 Figure 8
Figure 8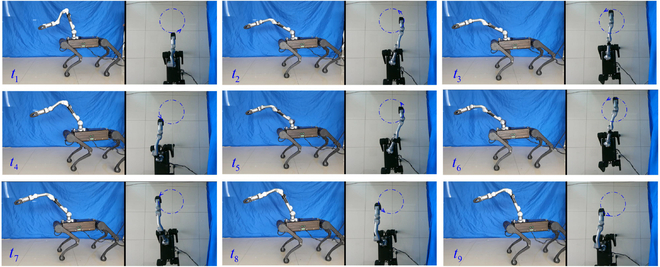 Figure 9
Figure 9 Figure 10
Figure 10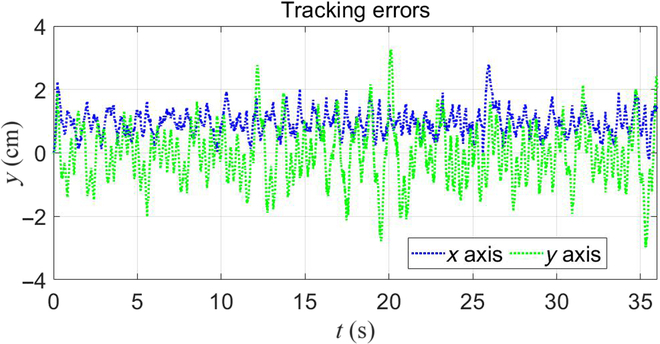 Figure 11
Figure 11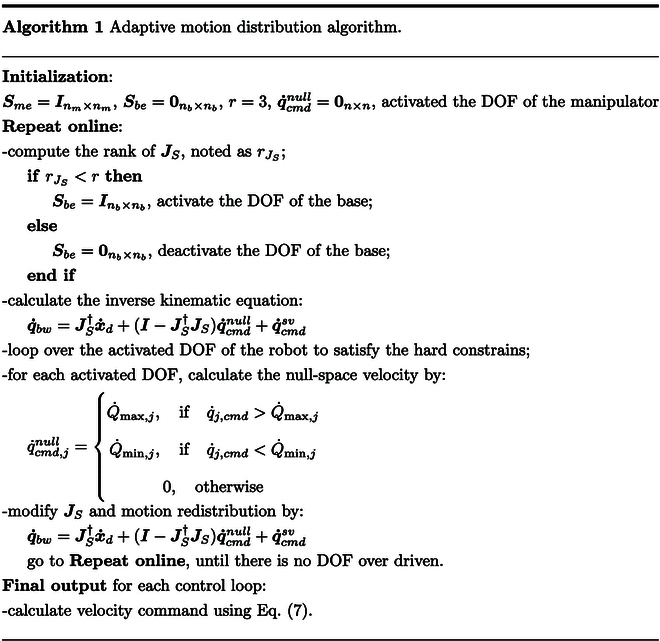 Figure 1
Figure 1Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Mechanisms and Dynamics · Robotic Locomotion and Control · Robot Manipulation and Learning