A Master‐Follower Teleoperation System for Robotic Catheterisation: Design, Characterisation and Tracking Control
Ali A. Nazari, Jeremy Catania, Soroush Sadeghian, Amir Jalali, Houman Masnavi, Farrokh Janabi‐Sharifi, Kourosh Zareinia

TL;DR
This paper introduces a master-follower robotic system for catheterization that improves precision and mimics manual techniques, with performance evaluated on various path-tracking tasks.
Contribution
A novel three-degree-of-freedom master-follower system for robotic catheterization with a grip-insert-release mechanism to prevent catheter buckling.
Findings
The system achieved mean Euclidean errors between 0.64 and 1.53 cm across different path types.
Mean absolute errors ranged from 0.81 to 1.92 cm, meeting precision targets with an open-loop controller.
Closed-loop control is necessary to handle catheter hysteresis and nonlinearities.
Abstract
Over the past 2 decades, telerobotic systems with robot‐mediated, minimally invasive techniques, have mitigated radiation exposure for medical staff and extended medical services to remote areas. To enhance these services, master‐follower telerobotic systems should offer transparency, enabling surgeons and clinicians to feel force interactions similar to those the follower device experiences with patients' bodies. We present a three‐degree‐of‐freedom master‐follower teleoperated system for robotic catheterisation. The follower device uses a grip‐insert‐release mechanism to prevent catheter buckling and torsion, mimicking real‐world manual intervention. Performance is evaluated through open‐loop path tracking on circular, infinity‐like and spiral paths. Path tracking errors, mean Euclidean error (MEE) and mean absolute error (MAE), range from 0.64 to 1.53 cm (MEE) and 0.81–1.92 cm…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
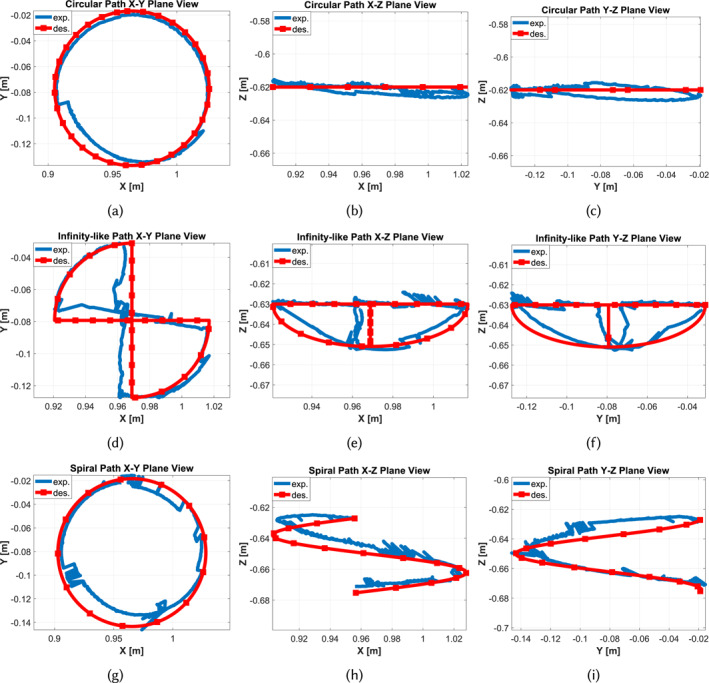 Figure 1
Figure 1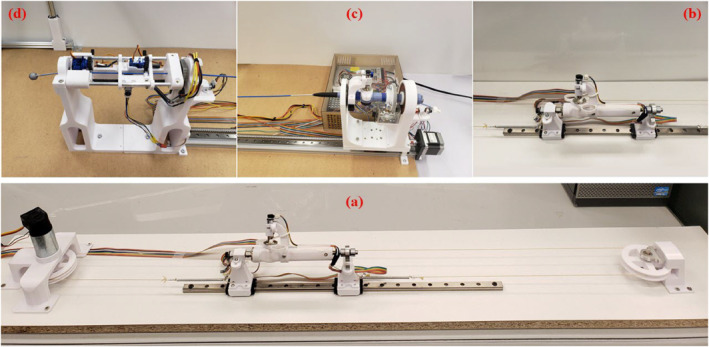 Figure 2
Figure 2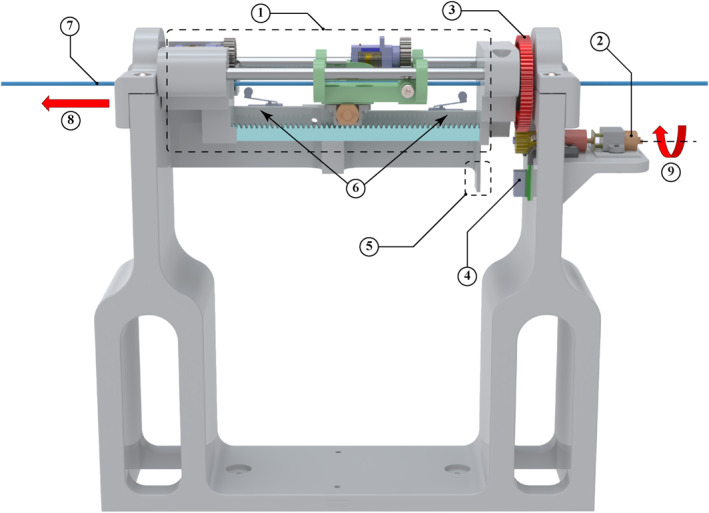 Figure 3
Figure 3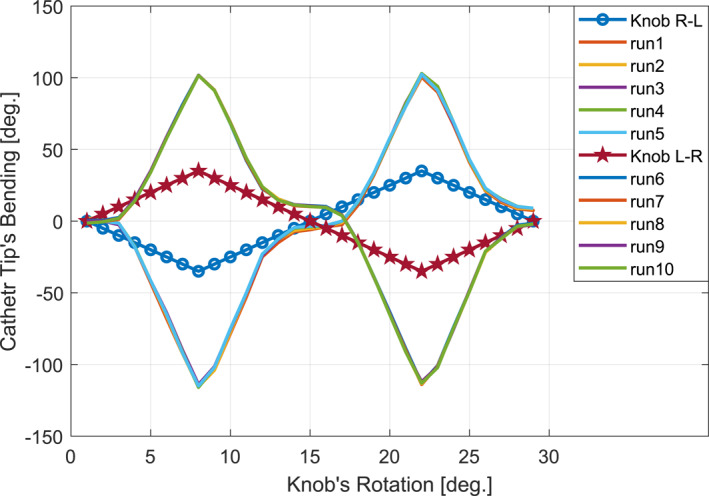 Figure 4
Figure 4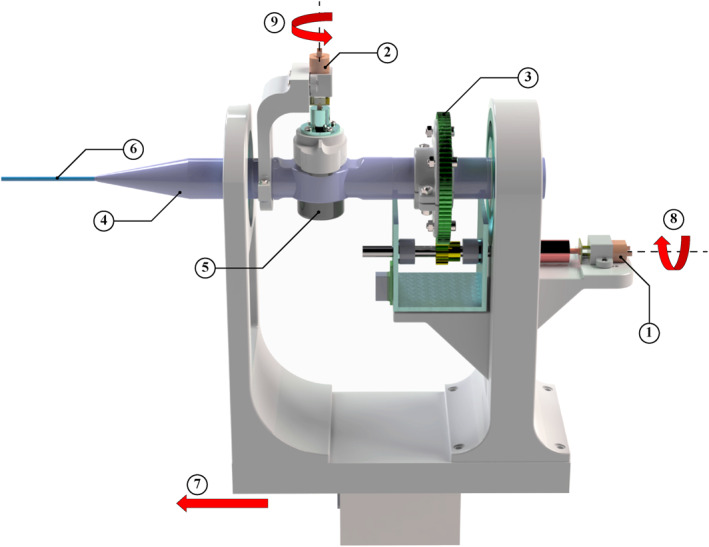 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8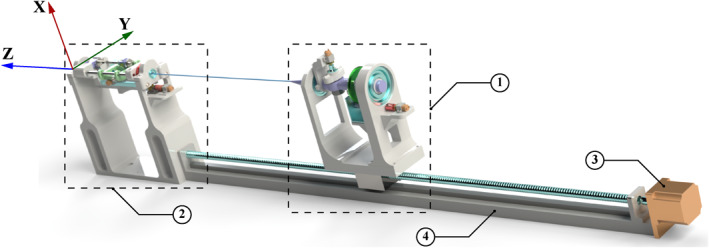 Figure 9
Figure 9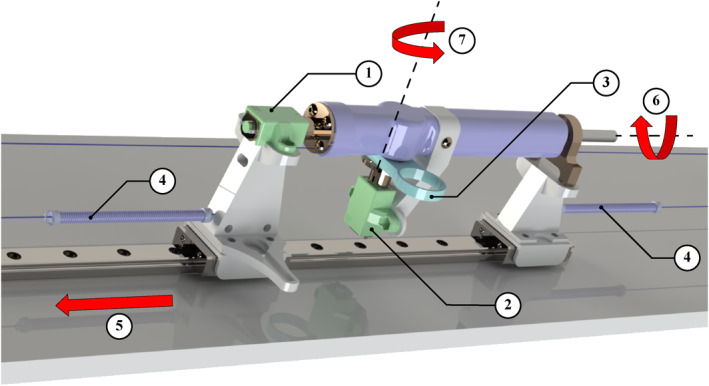 Figure 10
Figure 10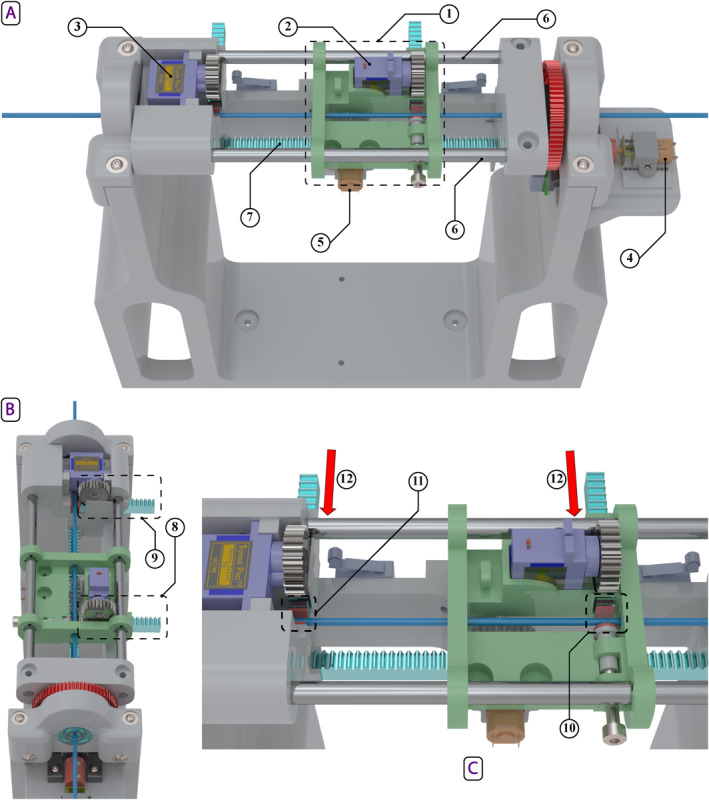 Figure 11
Figure 11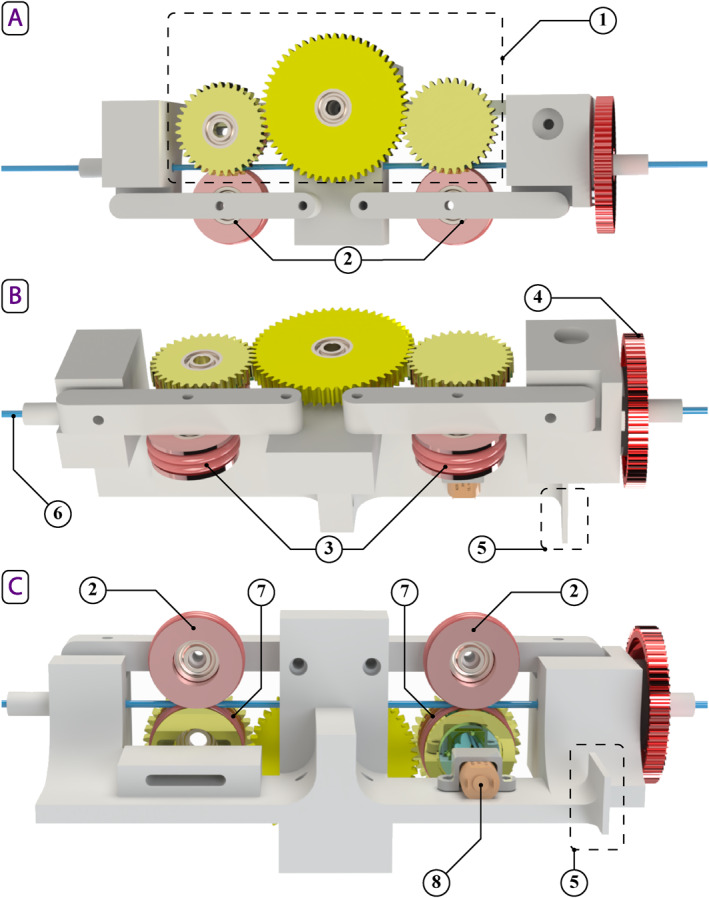 Figure 12
Figure 12Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsTeleoperation and Haptic Systems · Soft Robotics and Applications · Surgical Simulation and Training