Two key algorithms for intelligent inspection robots in electric bicycle charging sheds
Yingjian An, Ge Wei

TL;DR
This paper introduces two new algorithms to improve the performance of inspection robots in narrow electric bicycle charging sheds, enhancing safety and efficiency.
Contribution
The paper introduces MS-RRT* for narrow path planning and an improved SOLOv2 for small-target recognition in inspection robots.
Findings
MS-RRT* reduces sampling nodes in obstacles by 29.36% and achieves 100% exploration success in narrow channels.
Improved SOLOv2 increases small-target detection accuracy from 52.9% to 62.5% without slowing processing speed.
The algorithms outperform existing methods in efficiency and robustness for inspection tasks.
Abstract
The deployment of intelligent inspection robots in electric bicycle charging sheds is critical for preventing fire hazards, yet faces challenges in navigating narrow passages and recognizing small components. This paper proposes two enhanced algorithms to address these issues: (1) a multi-root node RRT* (MS-RRT*) for efficient narrow-channel path planning, and (2) an improved SOLOv2-based instance segmentation method for small-target recognition. The MS-RRT* introduces dynamic secondary root nodes with constrained expansion cycles, significantly increasing the probability of traversing narrow channels while reducing sampling nodes in obstacles by 29.36% compared to classical RRT*. For component recognition, the enhanced SOLOv2 algorithm augments feature pyramid outputs with larger hierarchical maps, improving small-target accuracy (e.g., button detection from 52.9% to 62.5%) without…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
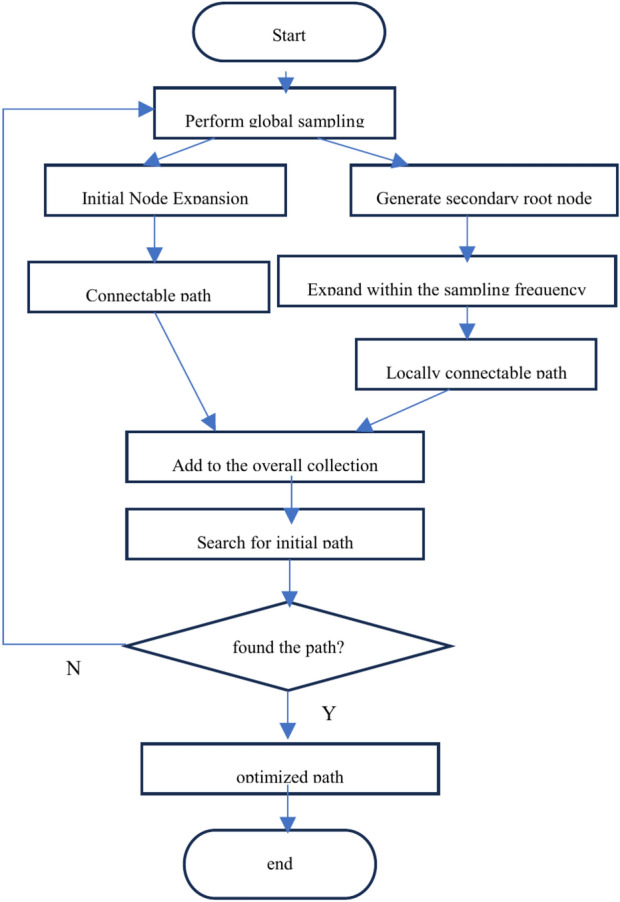 Figure 1
Figure 1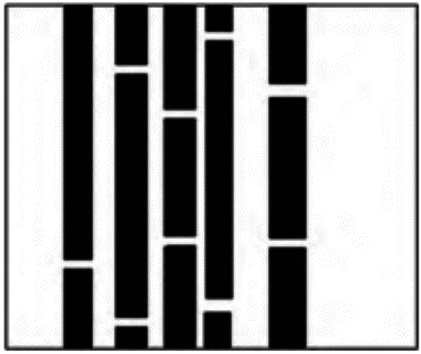 Figure 2
Figure 2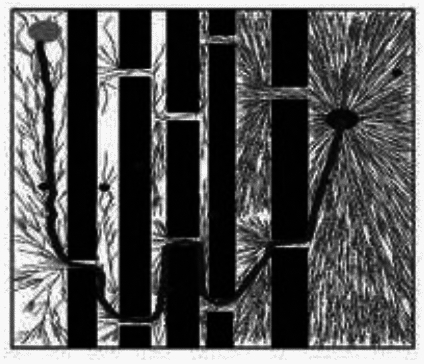 Figure 3
Figure 3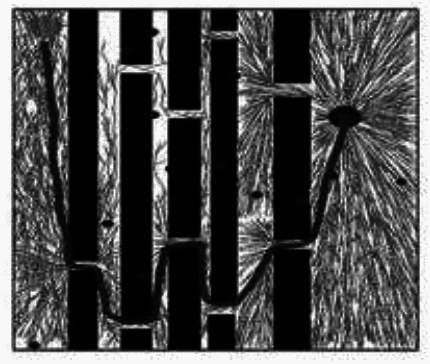 Figure 4
Figure 4 Figure 5
Figure 5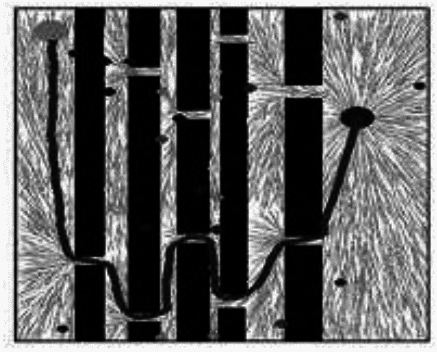 Figure 6
Figure 6 Figure 7
Figure 7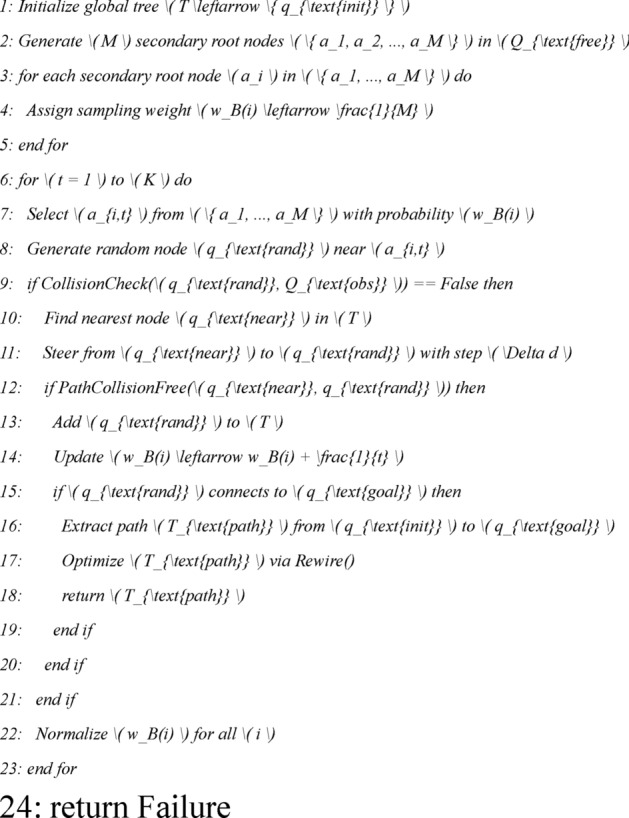 Figure 8
Figure 8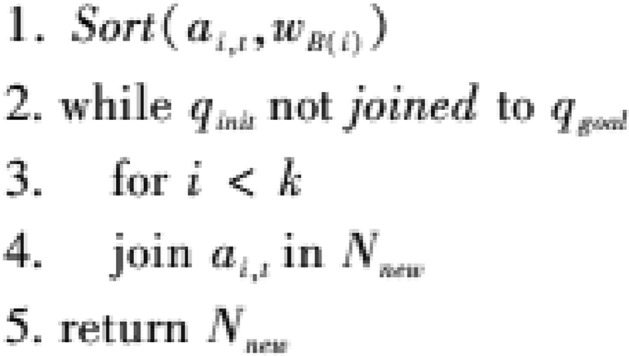 Figure 9
Figure 9Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsAdvanced Neural Network Applications · Vehicle License Plate Recognition · Robotics and Sensor-Based Localization