Monocular Initialization for Real-Time Feature-Based SLAM in Dynamic Environments with Multiple Frames
Hexuan Dou, Bo Liu, Yinghao Jia, Changhong Wang

TL;DR
This paper introduces a new method for improving monocular SLAM in dynamic environments by using multiple frames to better estimate initial poses and landmarks.
Contribution
The novel contribution is a real-time method using ST-RANSAC and multi-frame analysis to enhance initialization accuracy in dynamic settings.
Findings
The proposed method improves initial pose estimation accuracy by constructing static landmarks.
It reduces feature extraction scale and computational cost significantly.
Experimental results show better performance compared to the baseline on dynamic datasets.
Abstract
Two-view epipolar initialization for feature-based monocular SLAM with the RANSAC approach is challenging in dynamic environments. This paper presents a universal and practical method for improving the automatic estimation of initial poses and landmarks across multiple frames in real time. Image features corresponding to the same spatial points are matched and tracked across consecutive frames, and those that belong to stationary points are identified using ST-RANSAC, an algorithm designed to detect inliers based on both spatial and temporal consistency. Two-view epipolar computations are then performed in parallel among frames and corresponding features to select the most reliable initialization. The proposed method is integrated with ORB-SLAM3 and evaluated on dynamic datasets for comparative analysis with the baseline. The experimental results demonstrate that the proposed method…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
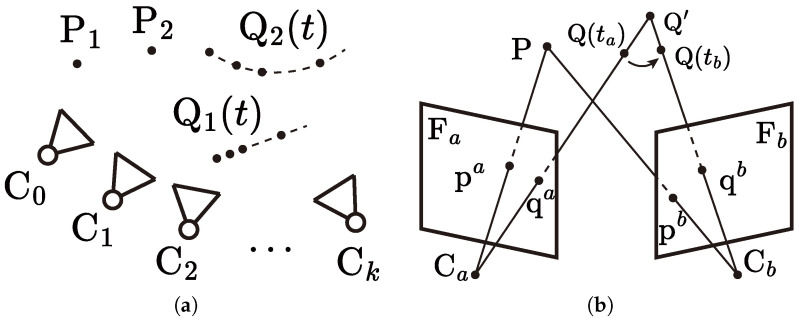 Figure 1
Figure 1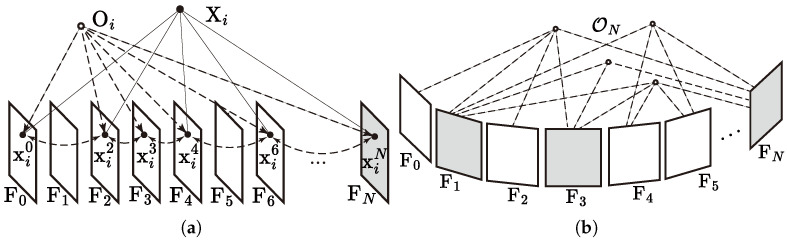 Figure 2
Figure 2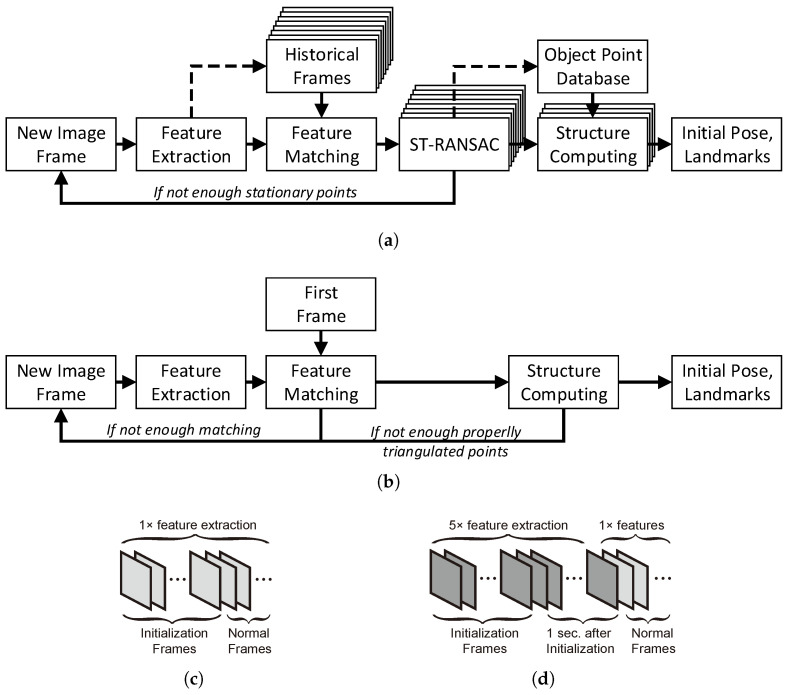 Figure 3
Figure 3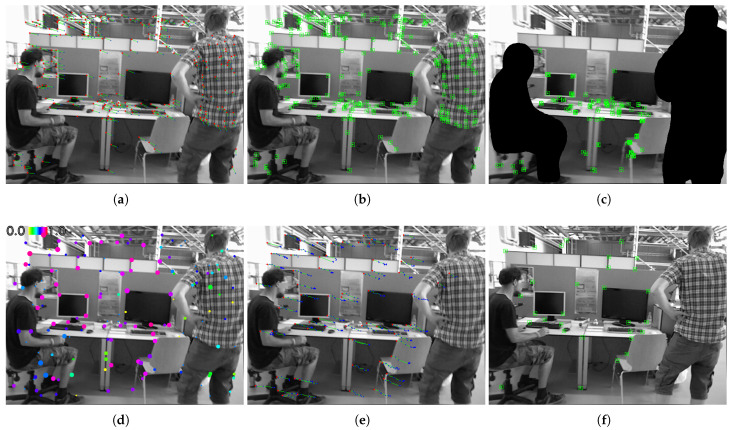 Figure 4
Figure 4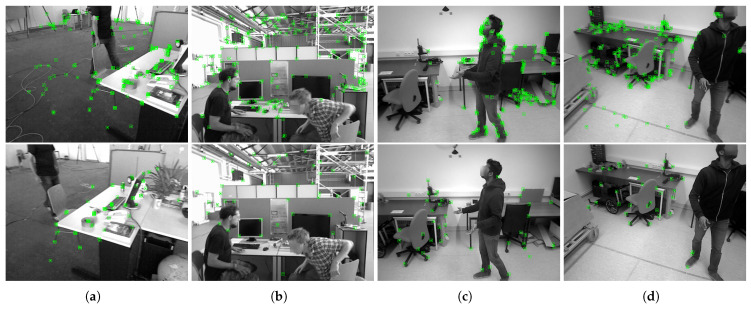 Figure 5
Figure 5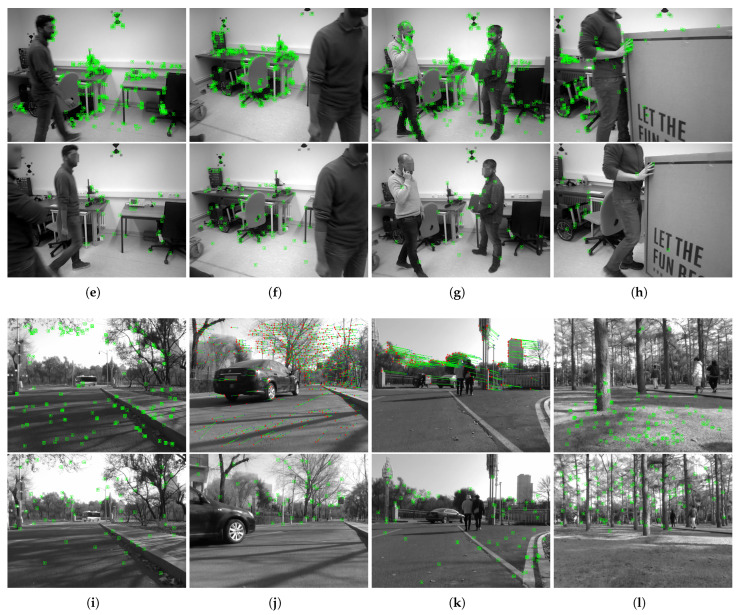 Figure 6
Figure 6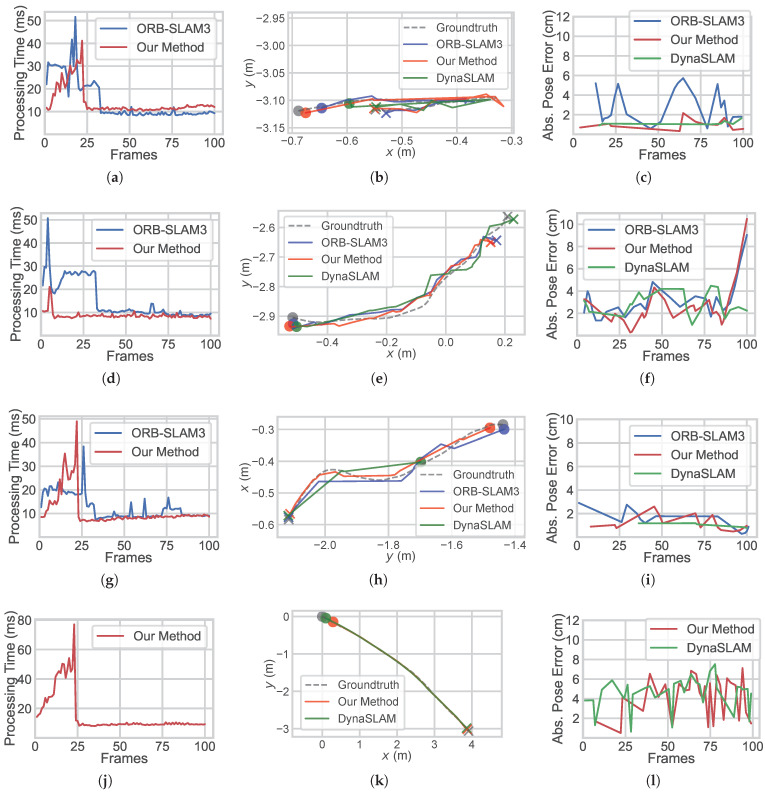 Figure 7
Figure 7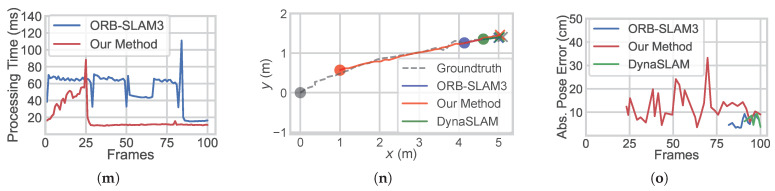 Figure 8
Figure 8Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotics and Sensor-Based Localization · Advanced Image and Video Retrieval Techniques · Robotic Path Planning Algorithms