Improved Exponential and Cost-Weighted Hybrid Algorithm for Mobile Robot Path Planning
Ming Hu, Shuhai Jiang, Kangqian Zhou, Xunan Cao, Cun Li

TL;DR
This paper introduces a new hybrid algorithm for mobile robot path planning that improves efficiency and smoothness compared to existing methods.
Contribution
The novel hybrid algorithm combines an improved A* with Dynamic Window Approach, enhancing path smoothness and search efficiency.
Findings
The hybrid algorithm improves search efficiency by 10.93% and reduces search node count by 32.26%.
It decreases turning points by 36.36% and shortens total path length by 22.05%.
The algorithm is more stable and reduces collision probability in real-world environments.
Abstract
The A* algorithm is widely used in mobile robot path planning; however, it faces challenges such as unsmooth planned paths, redundant nodes, and extensive search areas. This paper proposes a hybrid algorithm combining an improved A* algorithm with the Dynamic Window Approach. By quantifying grid obstacle data to extract environmental information and employing a grid-based environmental modeling method, the proposed approach enhances path smoothness at turns using second-order Bezier curve smoothing. It improves the heuristic function and child node selection process, applying these advancements in experimental path planning scenarios. A simulated 2D map was constructed using point cloud scanning in RViz to validate the hybrid algorithm through simulations and real-world outdoor tests. Experimental results demonstrate that, compared to the A* and DWA algorithms, the improved hybrid…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4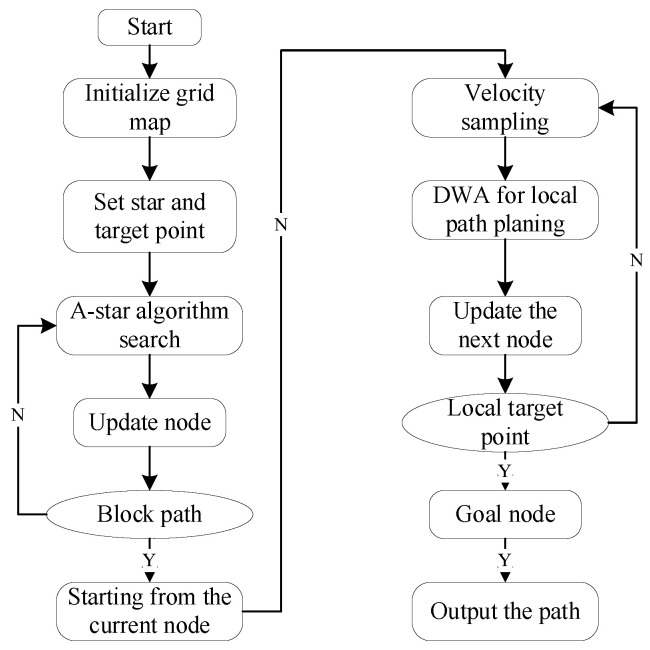 Figure 5
Figure 5 Figure 6
Figure 6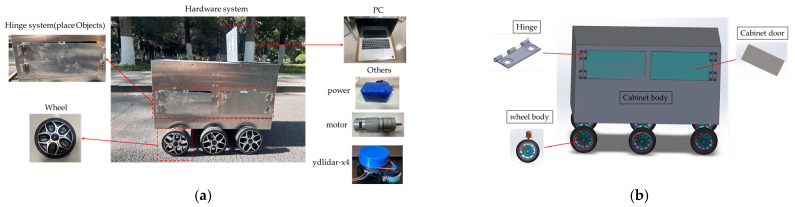 Figure 7
Figure 7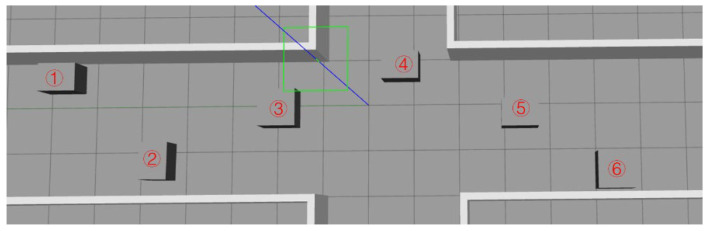 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12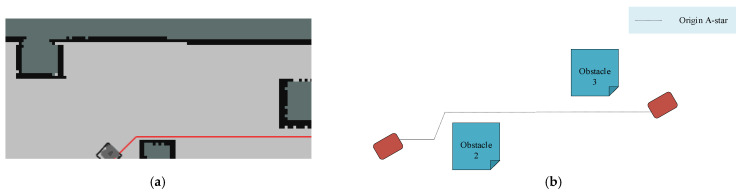 Figure 13
Figure 13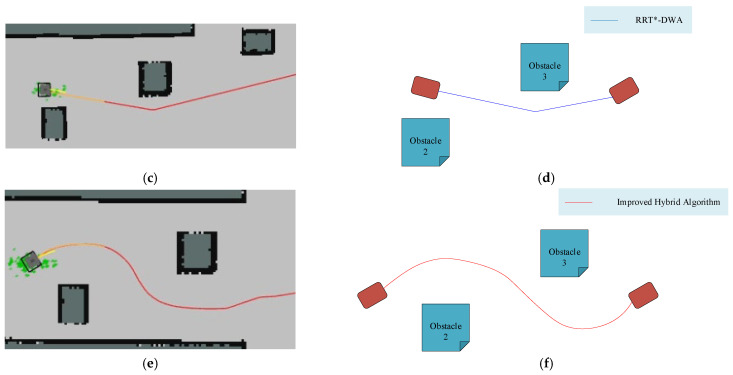 Figure 14
Figure 14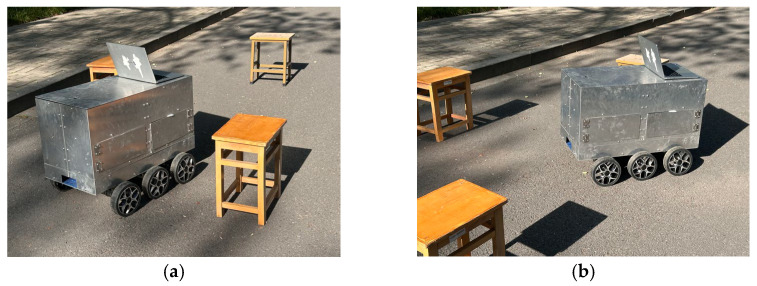 Figure 15
Figure 15 Figure 16
Figure 16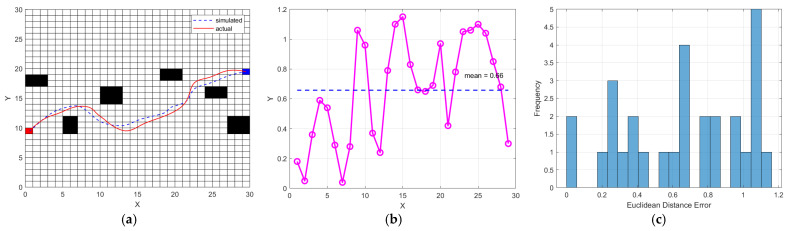 Figure 17
Figure 17 Figure 18
Figure 18Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Path Planning Algorithms · Robotics and Sensor-Based Localization · Computational Geometry and Mesh Generation