Analytical Formulation of Relationship Between Sensors and Euler Angle Errors for Arbitrary Stationary Alignment Based on Accelerometer and Magnetometer
Chang June Lee, Jung Keun Lee

TL;DR
This paper develops a mathematical model to understand how sensor errors affect orientation measurements in devices like AHRS, regardless of sensor alignment.
Contribution
The paper introduces an analytical formulation linking sensor errors to Euler angle errors for arbitrary alignments using accelerometer and magnetometer data.
Findings
The error formulation accurately describes total and partial Euler angle errors for aligned and misaligned sensor configurations.
Sensor error factors like scale, installation, and offset are shown to influence Euler angle errors through linear relationships.
Simulations confirmed the formulation's effectiveness in analyzing error contributions under arbitrary Euler angles.
Abstract
An attitude and heading reference system (AHRS) based on the inertial measurement unit is crucial for various applications. In an AHRS, stationary alignments are performed to determine the initial orientation of the sensor frame with respect to the navigation frame. However, the stationary alignment accuracy is affected by sensor error factors. Therefore, several studies have attempted to analyze and minimize the effects of these errors. However, there have been no studies describing and analyzing the Euler angle errors for various sensor orientations. This paper presents the analytical formulation of the relationship between the sensor and the Euler angle errors based on accelerometer and magnetometer signals, regardless of alignment between the sensor and the navigation frames. We selected three-axis attitude determination (TRIAD) as the stationary alignment method and considered the…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
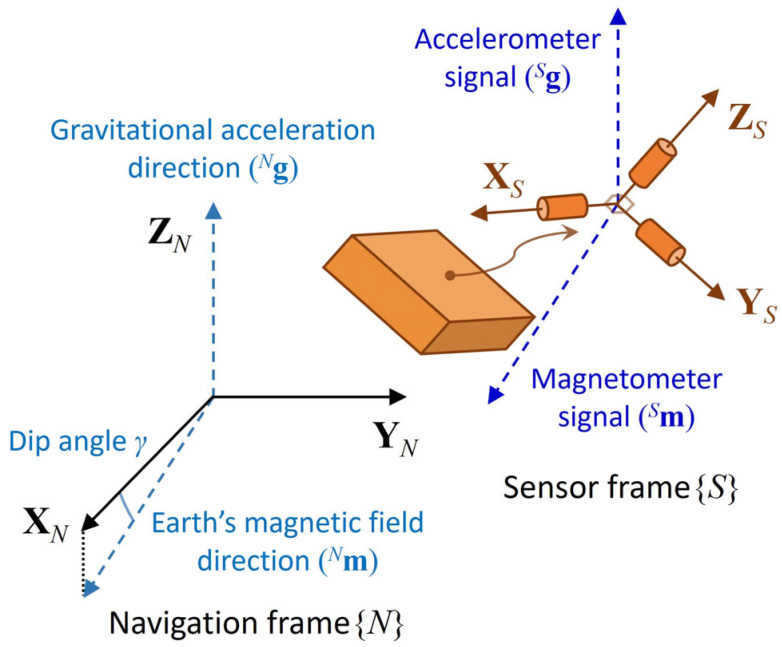 Figure 1
Figure 1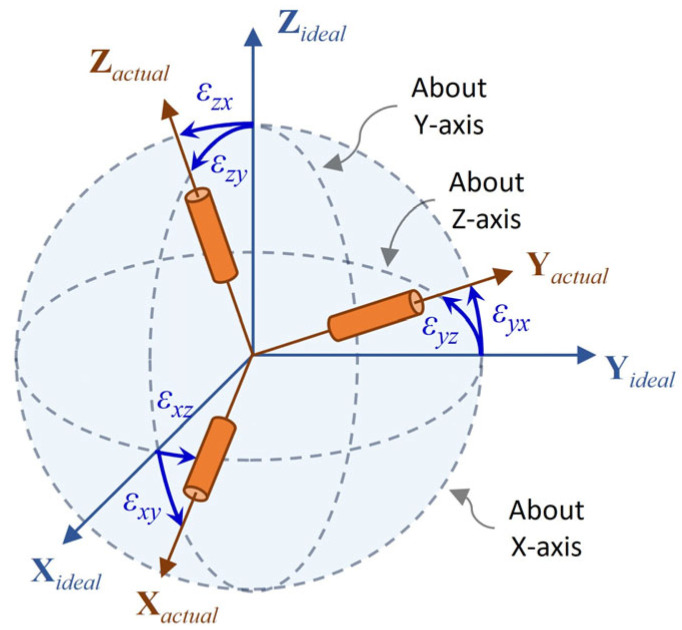 Figure 2
Figure 2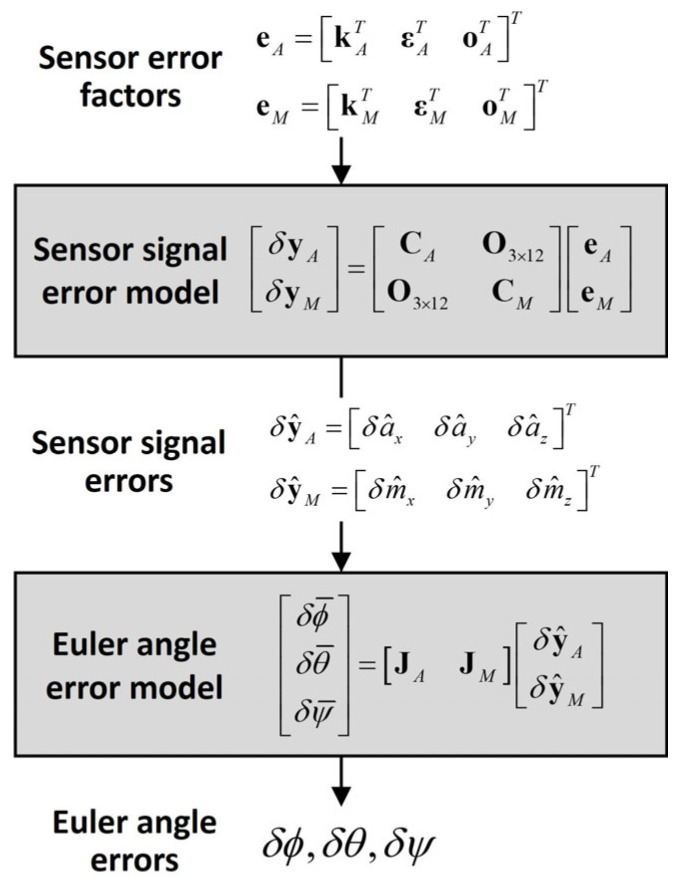 Figure 3
Figure 3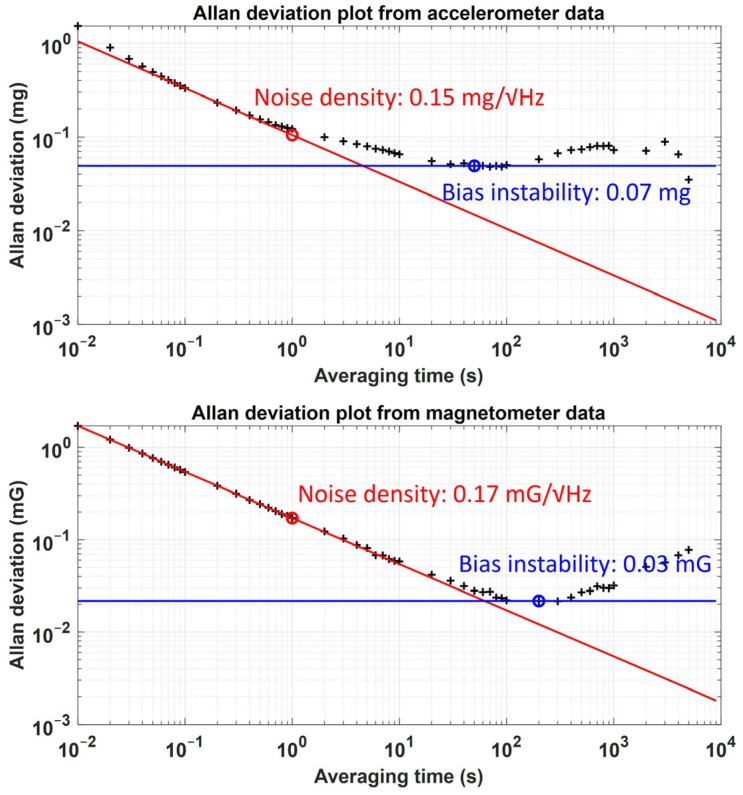 Figure 4
Figure 4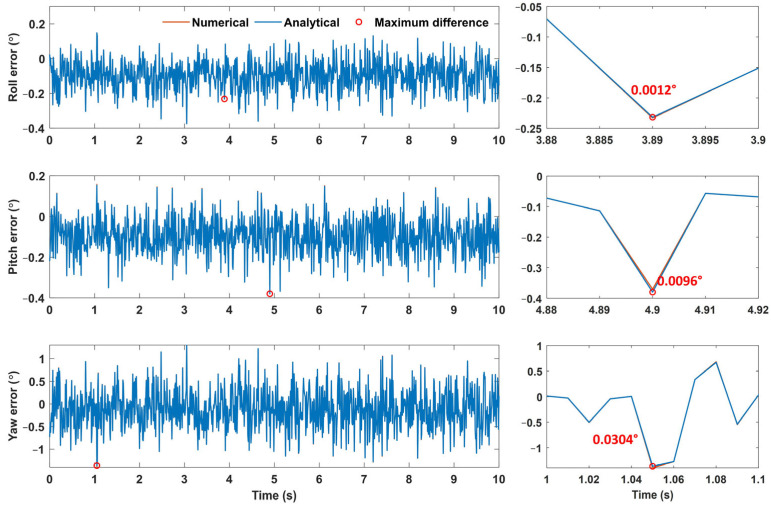 Figure 5
Figure 5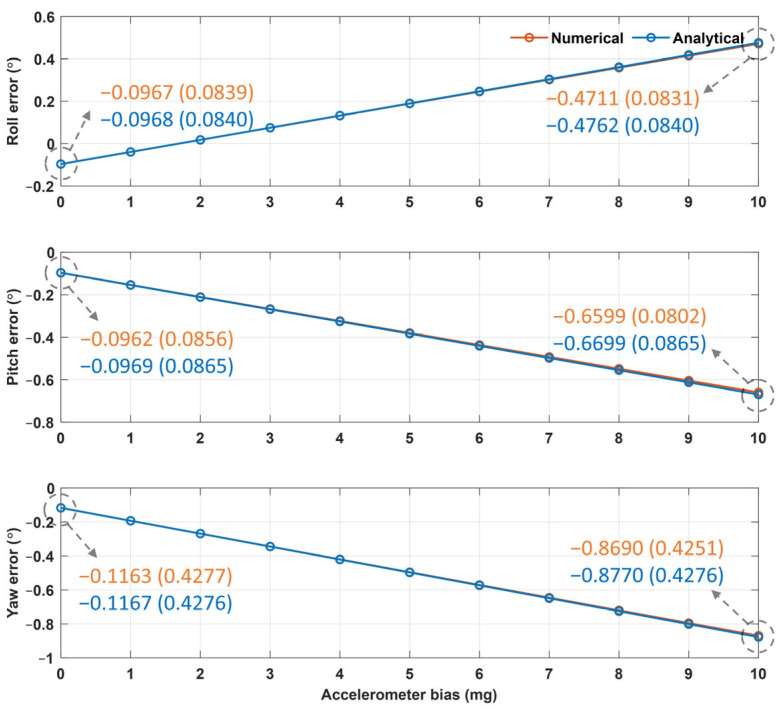 Figure 6
Figure 6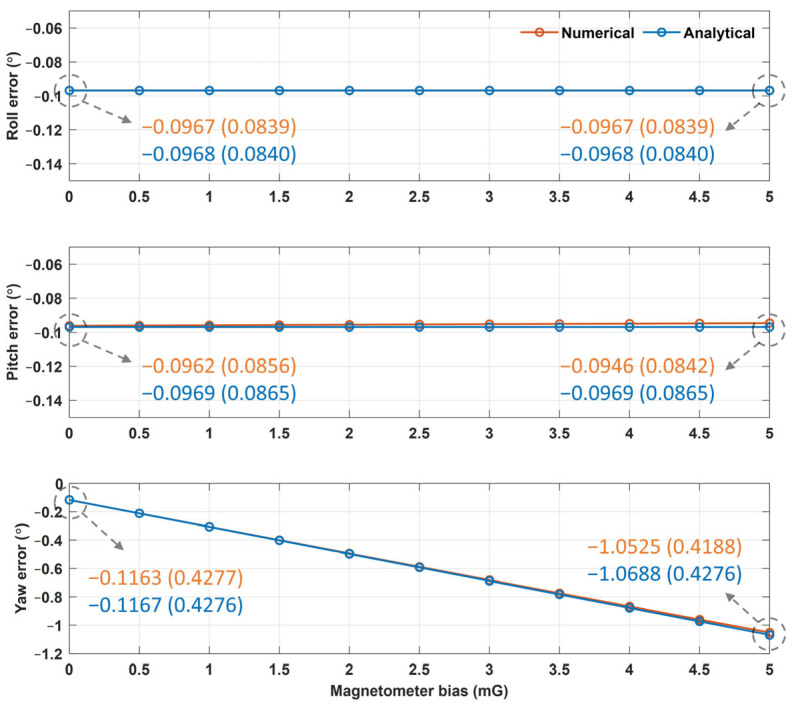 Figure 7
Figure 7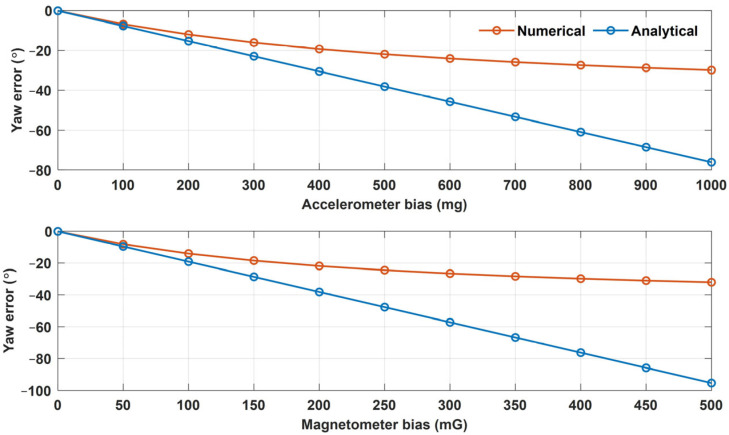 Figure 8
Figure 8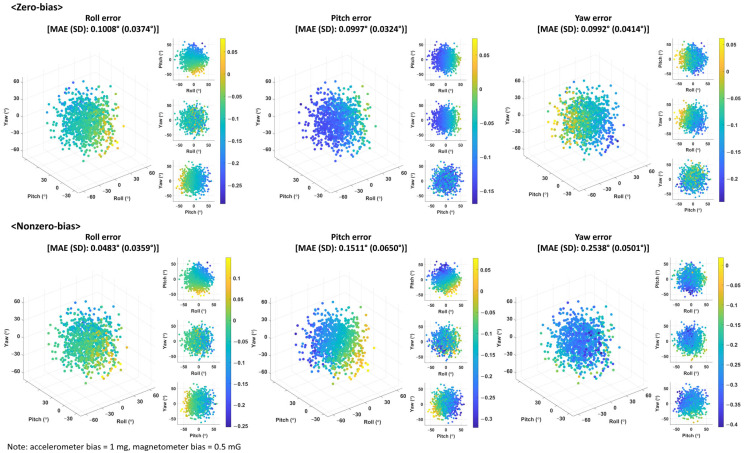 Figure 9
Figure 9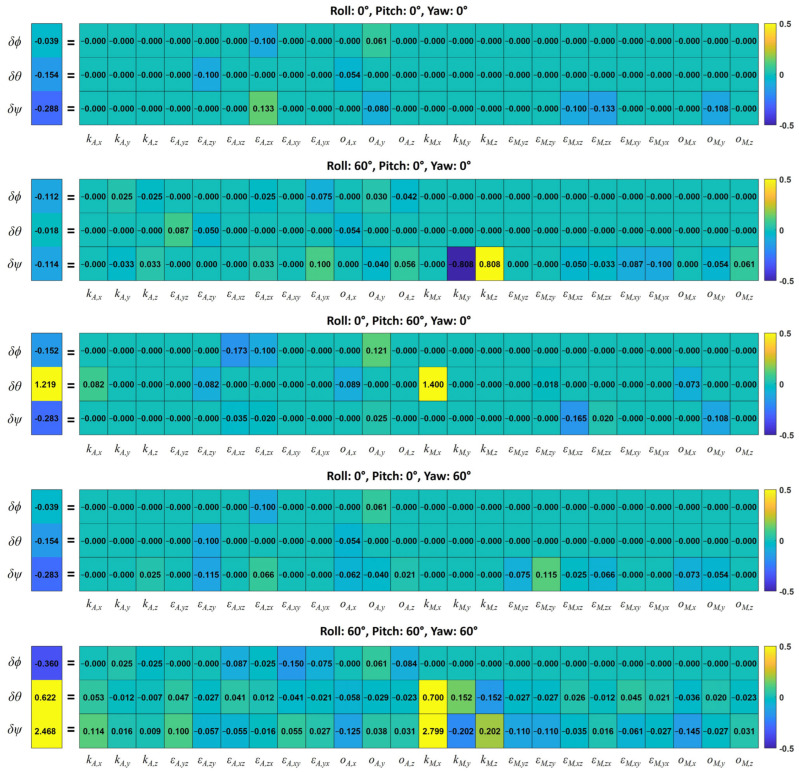 Figure 10
Figure 10Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsInertial Sensor and Navigation · GNSS positioning and interference · Target Tracking and Data Fusion in Sensor Networks