Robust Smoothing Cardinalized Probability Hypothesis Density Filter-Based Underwater Multi-Target Direction-of-Arrival Tracking with Uncertain Measurement Noise
Xinyu Gu, Xianghao Hou, Boxuan Zhang, Yixin Yang, Shuanping Du

TL;DR
This paper introduces a new method for tracking multiple underwater targets with uncertain noise by combining noise estimation and smoothing techniques.
Contribution
The novel contribution is integrating Saga–Husa noise estimation and backward smoothing into the CPHD filter for robust underwater multi-target tracking.
Findings
The proposed method improves robustness and accuracy in uncertain underwater noise environments.
Backward smoothing enhances tracking precision when combined with dynamic noise estimation.
Simulations confirm superior performance over existing DOA tracking techniques.
Abstract
In view of the typical multi-target scenarios of underwater direction-of-arrival (DOA) tracking complicated by uncertain measurement noise in unknown underwater environments, a robust underwater multi-target DOA tracking method is proposed by incorporating Saga–Husa (SH) noise estimation and a backward smoothing technique within the framework of the cardinalized probability hypothesis density (CPHD) filter. First, the kinematic model of underwater targets and the measurement model based on the received signals of a hydrophone array are established, from which the CPHD-based multi-target DOA tracking algorithm is derived. To mitigate the adverse impact of uncertain measurement noise, the Saga–Husa approach is deployed for dynamic noise estimation, thereby reducing noise-induced performance degradation. Subsequently, a backward smoothing technique is applied to the forward filtering…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8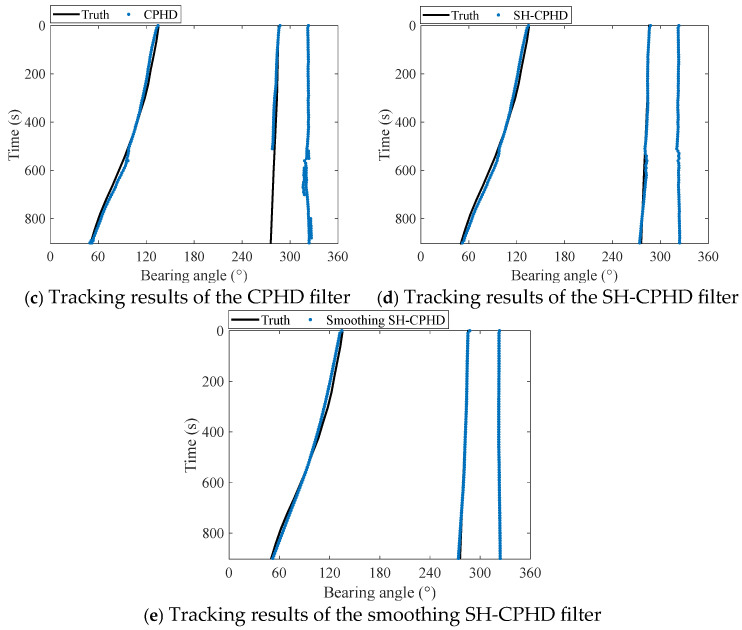 Figure 9
Figure 9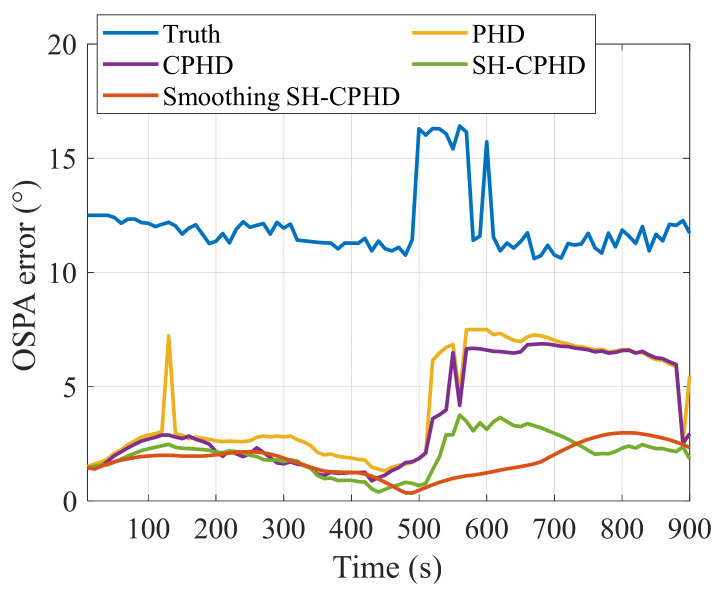 Figure 10
Figure 10Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsTarget Tracking and Data Fusion in Sensor Networks · Underwater Acoustics Research · Underwater Vehicles and Communication Systems