Prescribed Performance Bounded-H∞ Control for Flexible-Joint Manipulators Without Initial Condition Restriction
Ye Zhang, Ruibo Sun, Jie Shang

TL;DR
This paper introduces a new control method for flexible-joint manipulators that improves performance and robustness without restricting initial conditions.
Contribution
The novel contribution is a prescribed performance bounded-H∞ controller that operates independently of initial states using an improved barrier Lyapunov function.
Findings
The proposed controller ensures smooth control input transitions and rapid error convergence.
Simulation experiments confirm the controller's effectiveness in stabilizing flexible-joint manipulators.
The method enhances operational workspace and robustness compared to existing prescribed performance control algorithms.
Abstract
Flexible-joint manipulators have a lightweight nature, compact structure, and high flexibility, making them widely applicable in industrial manufacturing, biomedical instruments, and aerospace fields. However, the inherent flexibility of single-link flexible-joint manipulators (SLFJMs) poses substantial control challenges. Compared to traditional control algorithms, prescribed performance control (PPC) algorithms provide superior transient response and steady-state performance by defining a prescribed performance function. However, existing PPC algorithms are limited to a specific range of system initial states, which reduces the joint manipulator’s operational workspace and weakens the robustness of the control algorithm. To address this issue, this study proposes a prescribed performance bounded-H∞ fault-tolerant controller for SLFJMs. By designing an improved tangent-type barrier…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
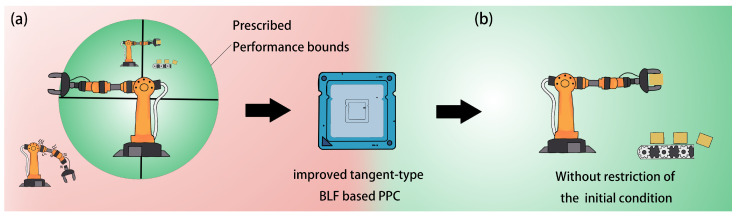 Figure 1
Figure 1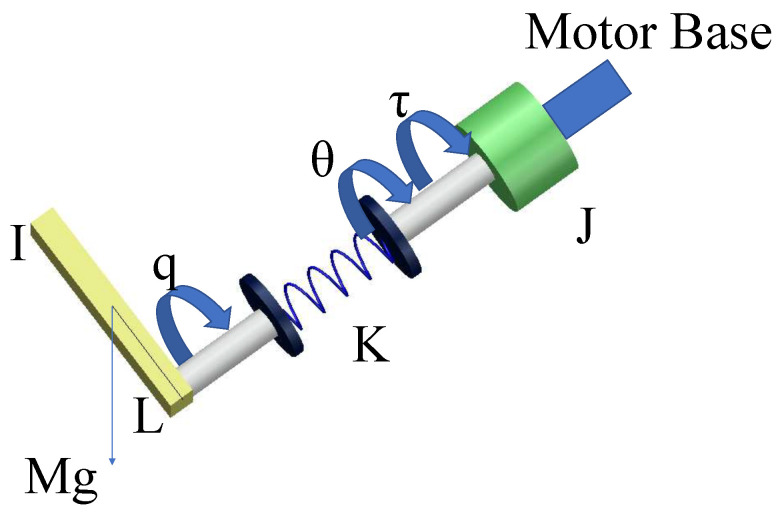 Figure 2
Figure 2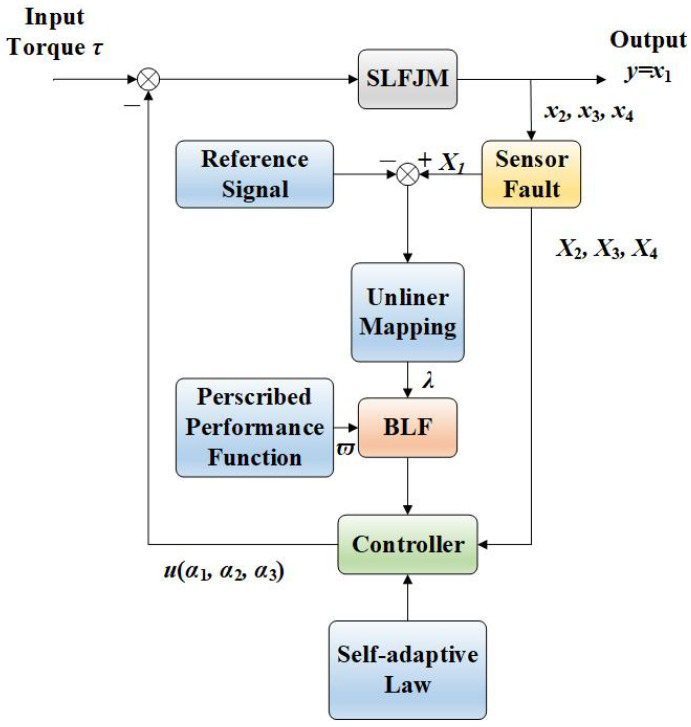 Figure 3
Figure 3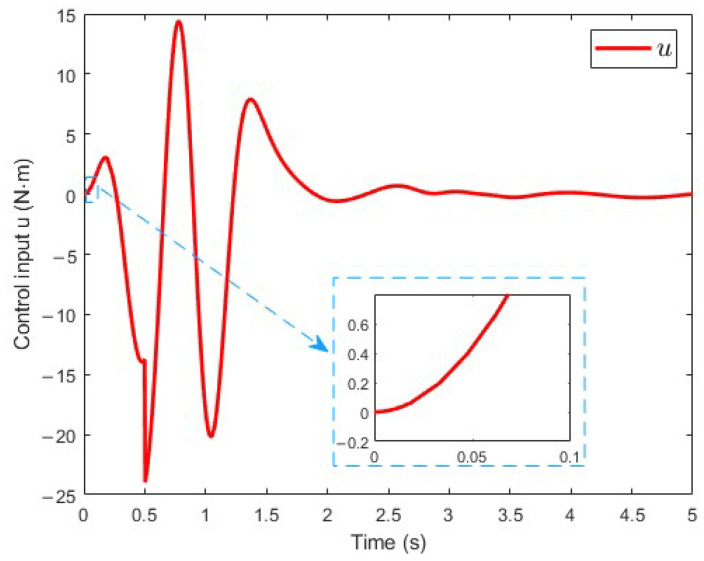 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsAdaptive Dynamic Programming Control · Adaptive Control of Nonlinear Systems · Advanced Technologies in Various Fields