Placing Objects on Table Is Preferred over Direct Handovers When Users Are Occupied
Thieu Long Phan, Akansel Cosgun

TL;DR
This study shows that placing objects on a table is better than direct handovers when users are busy, improving satisfaction and safety.
Contribution
The paper introduces user preferences for object delivery by robots based on user attentiveness.
Findings
Table placement significantly improves user experience when users are occupied.
Participants preferred table placement even when unoccupied, showing its consistent effectiveness.
Direct handovers performed worse for occupied users compared to unoccupied ones.
Abstract
Service robots commonly deliver objects through direct handovers, assuming users are fully attentive. However, in real-world scenarios, users are often occupied with other tasks. This paper investigates how user attentiveness affects preferences between direct handovers and placing objects on a table. A user study was conducted (n = 25) to evaluate these strategies in scenarios where participants were either occupied (simulated via a typing task) or unoccupied. Results show that placing objects on the table significantly enhances user experience when users were occupied, with higher ratings for satisfaction, perceived safety, confidence in robot ability and intuitiveness of interaction. While direct handovers performed better with unoccupied users compared to occupied users, table placement maintained consistently high performance regardless of user state. All participants preferred…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
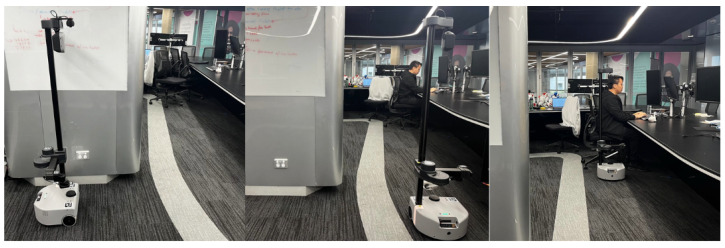 Figure 1
Figure 1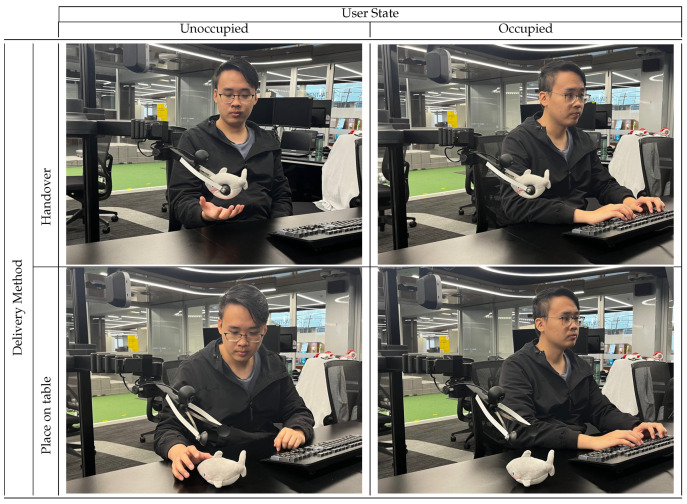 Figure 2
Figure 2Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsSocial Robot Interaction and HRI · AI in Service Interactions · Robot Manipulation and Learning