A Rapid Deployment Method for Real-Time Water Surface Elevation Measurement
Yun Jiang

TL;DR
This paper presents a new non-contact method for measuring water levels using stereo vision cameras, which can work efficiently in hard-to-reach areas.
Contribution
The novel approach uses stereo vision and point cloud processing without requiring physical water references.
Findings
A ZED 2i binocular camera was used to measure water surface elevation with less than 2 cm error within a 5 m range.
The method uses RANSAC to calculate the horizontal plane equation for accurate elevation estimation.
The system is non-contact and suitable for remote or inaccessible locations.
Abstract
In this research, I introduce a water surface elevation measurement method that combines point cloud processing techniques and stereo vision cameras. While current vision-based water level measurement techniques focus on laboratory measurements or are based on auxiliary devices such as water rulers, I investigated the feasibility of measuring elevation based on images of the water surface. This research implements a monitoring system on-site, comprising a ZED 2i binocular camera (Stereolabs, San Francisco, CA, USA). First, the uncertainty of the camera is evaluated in a real measurement scenario. Then, the water surface images captured by the binocular camera are stereo matched to obtain parallax maps. Subsequently, the results of the binocular camera calibration are utilized to obtain the 3D point cloud coordinate values of the water surface image. Finally, the horizontal plane…
Click any figure to enlarge with its caption.
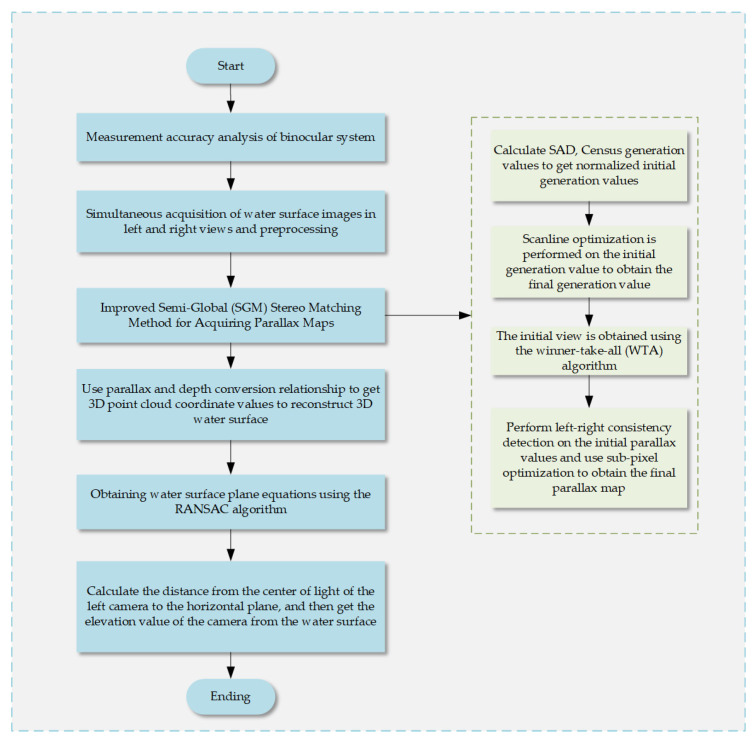 Figure 1
Figure 1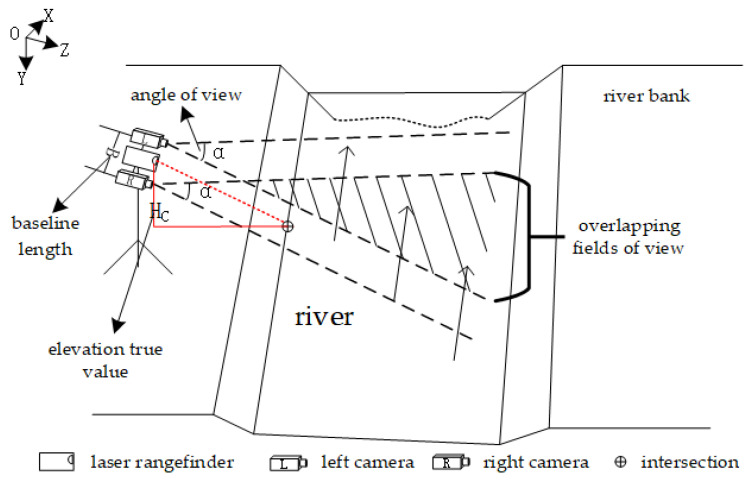 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4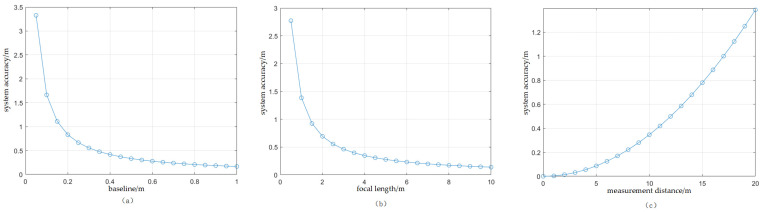 Figure 5
Figure 5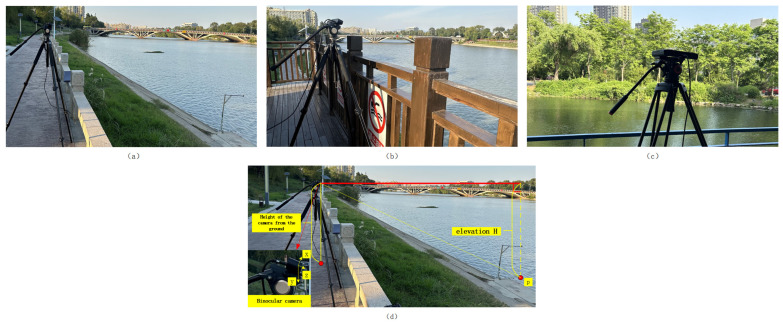 Figure 6
Figure 6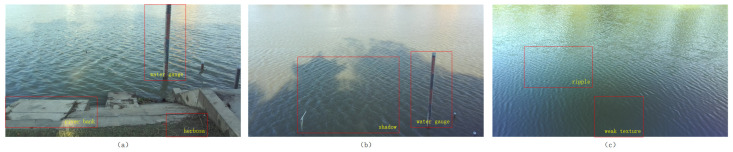 Figure 7
Figure 7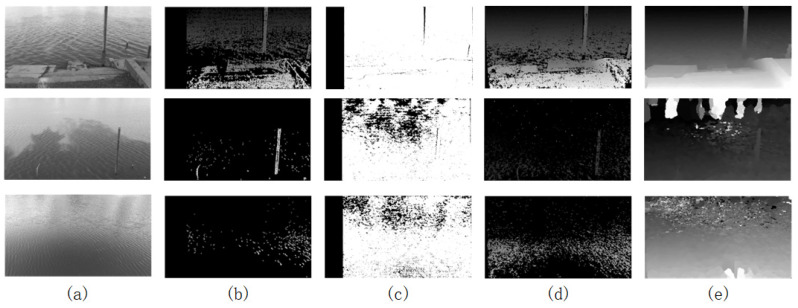 Figure 8
Figure 8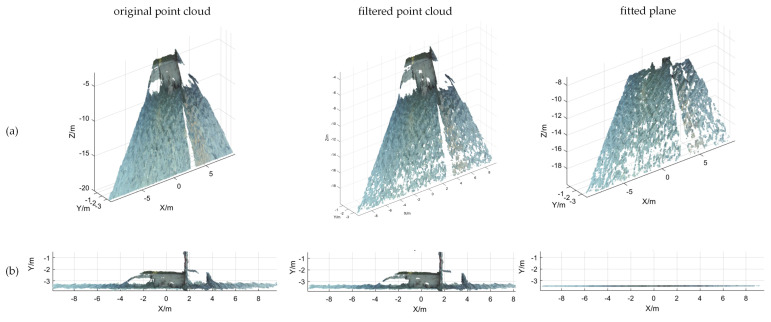 Figure 9
Figure 9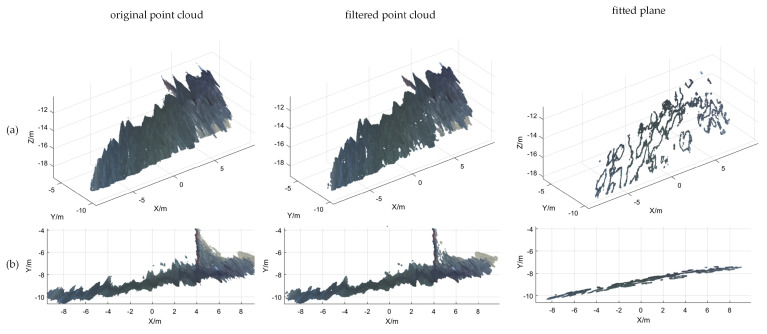 Figure 10
Figure 10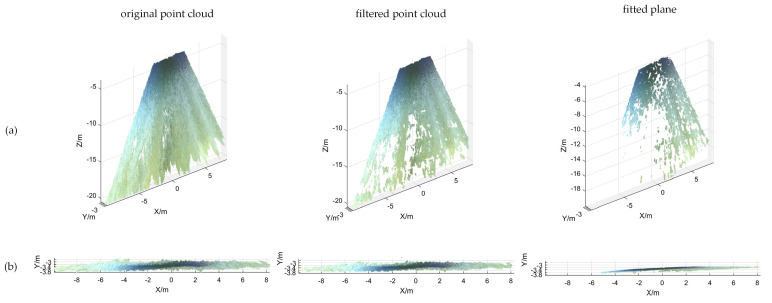 Figure 11
Figure 11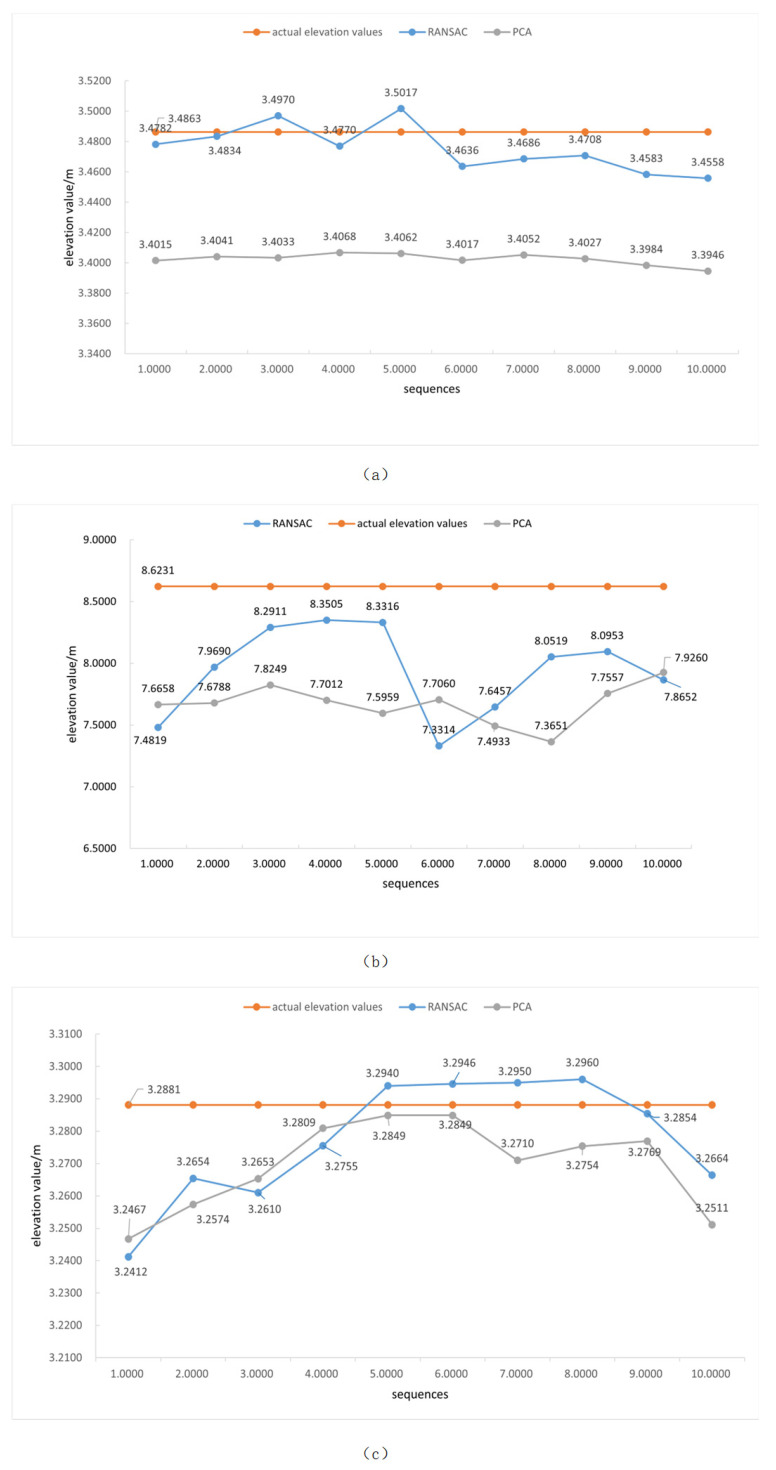 Figure 12
Figure 12Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotics and Sensor-Based Localization · Advanced Vision and Imaging · Remote Sensing and LiDAR Applications