Neural Radiance Field Dynamic Scene SLAM Based on Ray Segmentation and Bundle Adjustment
Yuquan Zhang, Guosheng Feng

TL;DR
This paper introduces a new SLAM method that improves 3D scene reconstruction in dynamic and changing environments using neural radiance fields.
Contribution
A novel SLAM approach combining ray segmentation and bundle adjustment for dynamic scenes using LK optical flow and CRF potentials.
Findings
The method outperforms existing systems in reconstruction quality on dynamic datasets.
Tracking accuracy is significantly improved in challenging lighting and dynamic conditions.
Experiments were conducted on TUM RGB-D, Openloris, and Bonn datasets.
Abstract
The current neural implicit SLAM methods have demonstrated excellent performance in reconstructing ideal static 3D scenes. However, it remains a significant challenge for these methods to handle real scenes with drastic changes in lighting conditions and dynamic environments. This paper proposes a neural implicit SLAM method that effectively deals with dynamic scenes. We employ a keyframe selection and tracking switching approach based on Lucas–Kanade (LK) optical flow, which serves as prior construction for the Conditional Random Fields potential function. This forms a semantic-based joint estimation method for dynamic and static pixels and constructs corresponding loss functions to impose constraints on dynamic scenes. We conduct experiments on various dynamic and challenging scene datasets, including TUM RGB-D, Openloris, and Bonn. The results demonstrate that our method…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
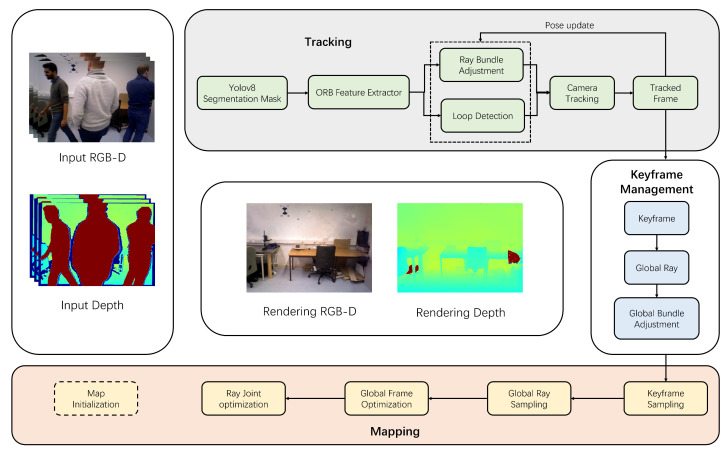 Figure 1
Figure 1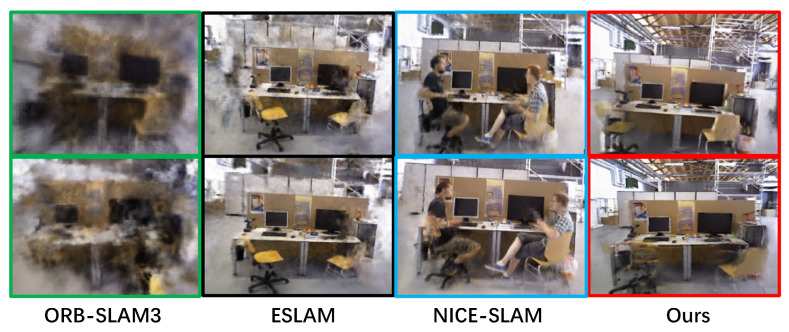 Figure 2
Figure 2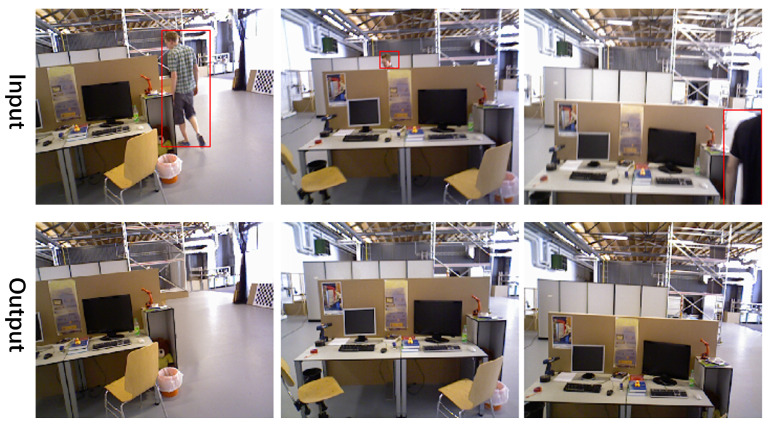 Figure 3
Figure 3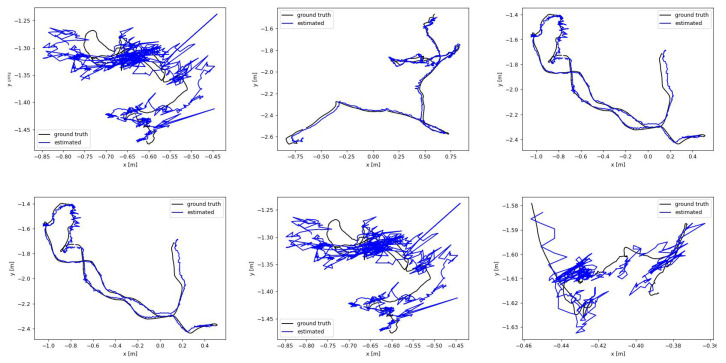 Figure 4
Figure 4Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotics and Sensor-Based Localization · Advanced Vision and Imaging · Remote Sensing and LiDAR Applications