Mixed Control Strategy for a Class of Sector-Bounded Nonlinear Systems
Adrian-Mihail Stoica, Isaac Yaesh

TL;DR
This paper introduces a mixed control strategy combining deterministic and stochastic elements to manage nonlinear systems more effectively.
Contribution
The novel approach integrates white noise into control gain, offering advantages in systems requiring precise control signal mean and variance.
Findings
Mixed control strategy outperforms deterministic control in managing nonlinear systems.
Matrix Inequalities conditions ensure stability and performance in closed-loop systems.
Numerical examples demonstrate the effectiveness of the mixed control approach.
Abstract
Here, mixed-strategy-based control of systems with sector-bounded nonlinearities is considered. The suggested control strategy applies a stochastic state feedback, where the control gain includes a white noise component in addition to the deterministic part. While each of the control signal components can sometimes accomplish the control task independently, the combination may have some merits. This is especially true when both the mean value and the variance of the control signal need to be quantified separately. Systems that apply deterministic state-feedback control are abundant, whereas the application of state-multiplicative noise as a mean of control is more limited. Nevertheless, Stochastic Anti Resonance (SAR) with state-multiplicative noise based control, are encountered in diverse engineering applications, physics modelling, and biological models, such as visual-motor tasks.…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
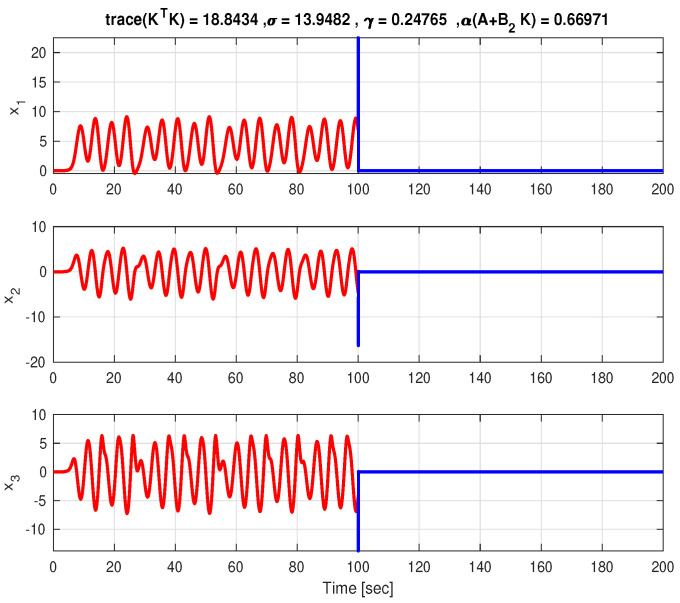 Figure 1
Figure 1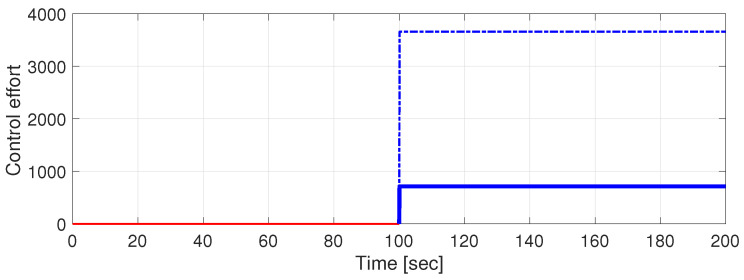 Figure 2
Figure 2Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
Topicsstochastic dynamics and bifurcation · Neural dynamics and brain function · Control Systems and Identification
1. Introduction
State-feedback controllers with deterministic gains are abundant, whereas the use of stochastic control (i.e., stochastic gains) to achieve stochastic antiresonance (SAR), so as to stabilize unstable nonlinear systems utilizing state-multiplicative noise, is more limited. The reverse case of stochastic resonance (SR), where a noise effect in a nonlinear system evokes resonance or even instability, has been considered in several contexts, such as the periodic occurrences of ice ages in [1]. Additional examples of SR are mentioned in [1,2], in relation to a particle in a double well, animal behavior, biological sensory neurons, ionic channels in cells, optical systems, and electronic devices. The action of SAR squid giant axons has also been considered in [3], where the potential for therapeutic neurological applications was pointed out. Further such SAR applications appear in [4,5,6]. In SR, a bell-shaped signal-to-noise ratio (SNR) as a function of the applied noise intensity is observed, whereas in SAR, the bell shape is upside down, i.e., the noise effect is to reduce the resonance level. When SAR is artificially achieved using a control input that applies state-multiplicative noise to reduce the resonance level, the artificial noise components can be generated using a normally distributed random number generator, appropriately scaled in proportion to the system states. Recently the stabilization of a class of nonlinear sector-bounded nonlinear systems was analyzed, where linear matrix inequalities (LMIs) based conditions have been derived [7]. The present paper is aimed at further developing the SAR idea, by combining stochastic control with deterministic control. To this end, the -gain of the resulting exponentially -stable closed-loop system is analyzed using the novel Lyapunov functional of [7], where motivation and some insight into SAR have been provided. To clarify our ideas, we explore the mechanism of SAR and its manifestation in nonlinear systems further. The most abundant example of SAR is a stick balancing on a fingertip. The pioneering work of [8,9] analyzed experimental results and suggested a stochastic inverted pendulum model to reproduce these results. Meanwhile, in [10], further numerical experiments were given, and it was pointed out that the same mechanism, where multiplicative noise has a stabilizing effect, also arises in the context of financial markets. One can gain some insight from the notion of the dynamical traps presented, e.g., in [11]. Loosely speaking, when the stick is placed at an incline, the balancing action is a random zero mean noise that is proportional to the angle the stick forms with the local vertical; therefore, initially large random perturbations of the stick with respect to the vertical are observed. Once the stick crosses the vertical line, the balancing action nulls and the system is trapped in this situation. This is of course, an oversimplified description, and to obtain a more exact description, one can either simulate the system or provide a stability analysis.
The present paper extends the stability results derived in [7] to the so called -attenuation problem, which represents a major research topic in control systems theory over the last few decades. There are two main differences with respect to the “classical” -attenuation problem (also well known in the deterministic framework as the norm minimization problem [12]). The first one is the fact that the two-input two-output standard system from the linear deterministic case includes sector-bounded nonlinearities in our formulation. A note in the Conclusion section suggests that based on the universal approximation theorem, the case considered in the present paper may be extended to more general types of nonlinearities. The second particularity consists of the mixed structure of the control law, including both a state-feedback component and a state-multiplicative white noise one. The aim of this hybrid structure is to improve the -attenuation-type performance with respect to the case when only a state-feedback deterministic control is used. In order to solve the -attenuation problem in the present paper, two main preliminary results are required. Firstly, stability conditions for the considered class of nonlinear stochastic systems, as derived in [7], are briefly presented in the Preliminary section. The second one, is in fact a bounded-real-lemma-type result, providing boundedness conditions for a weighted -gain associated with the stochastic system with sector-bounded nonlinearities. Its statement and proof are given in Theorem 1 of this paper. Then, combining these results, the mixed control problem including a state-feedback term and a state-dependent white noise component has been formulated and solved in Section 5. The theoretical results are illustrated using a numerical example for a third-order chaos generator model with sector-bounded nonlinearities.
Throughout the paper, denotes the n dimensional Euclidean space, is the set of all real matrices, and the notation ( ) for means that X is symmetric and positive definite (semi-definite, respectively). denotes the trace of matrix A and for and denotes . Throughout the paper, is a given probability space. Expectation is denoted by , and represents the space of all m-dimensional measurable stochastic processes with .
2. Preliminaries
In this section and in the beginning of the next section, we repeat a few preliminary definitions and results regarding the stability of stochastic systems that were already given in [7]. We did this for the sake of self completeness of the paper.Our focus is on stochastic systems with state multiplicative noise that satisfy the following Itô-type stochastic differential equations (SDEs):
where is a zero mean r-dimensional Wiener process adapted to an increasing family of of -algebras , with and . The state vector is , and it is assumed that functions and satisfy the existence conditions for a unique solution of the above stochastic differential equation (see e.g., [13,14,15]). For an initial condition at independent of the -algebra generated by , this solution will be denoted by . Assume that and , . Then, according to [16], the trivial solution of (1) is called stable in probability for if for any and ,
Moreover, the solution is called asymptotically stable in probability if it is stable in probability and if
One can prove (see, e.g., [16]) that is asymptotically stable in probability if there exists a twice continuously differentiable positive definite function , such that , where the infinitesimal generator has the expression [14,15]
in which and denote the first-order partial derivatives of with respect to t and x, respectively, and is its second partial derivative with respect to x. This result represents a generalization of the well-known Lyapunov’s theorem on asymptotic stability from the deterministic framework. Although this type of a stability is weaker than mean square exponential stability (see, e.g., [17]), it is still of practical value as we will see in the sequel.
3. Problem Formulation
Consider the following system:
where is the state vector, denotes the measured system output, is an exogenous input, and is a standard Wiener process with on the given probability space, which is also independent of . The elements of y are and the components of satisfy the sector conditions [18,19,20], which are equivalent to
In the present paper, we analyze a mixed control procedure for the stabilization of (3) using a state-feedback control law together with the tuning of the intensity D of the state dependent noise. Moreover, it will be shown that for a given , the mixed control strategy may accomplish the following weighted gain boundedness condition, expressed as
for all satisfying for a certain .
4. Weighted L2 Gain Characterization
Assume that the following conditions from [7] are accomplished.
H1. The derivatives of the nonlinearities are bounded, namely there exist , , such that , and
H2. The matrix C satisfies the condition .
Remark 1. The assumption may be fulfilled if the matrix is nonsingular when performing a similarity transformation . See [7] for the details. Note that the case of singular can be readilty aleviated by adding fictitious auxiliary outputs, the effect of which may be nulled by setting for their corresponding indices i.
For the sequel, let us define and .
Then, the following result characterizes the conditions for an upper bound on the induced weighted -norm of the system (3), for .
Theorem 1. Assume that assumptions H1 and H2 hold. If there exist , , , and , , such that
where the following notations have been introduced
and ; then, the solution of the stochastic system (3) with is asymptotically stable in probability for any sector-type nonlinearities , for which and , . Moreover, this solution satisfies the weighted -boundedness condition of (5).
Proof of Theorem 1. Consider the positive definite function
with , . Then direct computations give that
and
where was defined in the statement, and we denote
Further, define
and the nonlinearity constraints
. Applying the -procedure technique (see, e.g., [20]), the condition is then satisfied together with the constraints (10) if there exist , such that
Using the above expressions of and , we readily obtain that (11) is equivalent to
where is defined in the Theorem statement.Multiplying (12) by , for , the following is obtained
Then, for , the inequality (13) becomes
which may be rewritten as
with the definitions of (7). Using the definition of from the statement, it follows that if condition (6) is accomplished, then the inequality (15) holds for any . Thus, it can be concluded that
together with the sector constraints , . On the other hand, according to the Itô’s formula (see, e.g., [13]) for the function with the solution of the stochastic differential Equation (3), it follows that
from which, based on (16), it follows that
or, equivalently,
Integrating the latter equation from 0 to T, we obtain
On the other hand, from (6) in the statement of Theorem 1 it follows, by subtracting the non-negative term from the left-upper block, that
But, in [7], it is proved that if condition (17) holds, then the solution is also exponentially p-stable for (see, e.g., [16]) for . Namely, there exists , such that .Further, taking the limit of and noting that (see, e.g., [13,15]), we readily obtain that (5) holds. □
5. Mixed Strategy Control
Given the above bounded-real-lemma like result, we may now consider the mixed-strategy control of
where is the state vector, is the measured system output, z is the controlled output, and is the deterministic component of the control signal, whereas is the random component, namely the state-multiplicative noise introduced to implement a mixed strategy control signal. Assuming full access to the state-vector x, we can write
leading to . Then, applying Theorem 1 for the resulting system (18) obtained with the control law (19) and denoting , assuming , if follows that condition (6) may be written in the equivalent form
where
Note that one may interpret the following
as the overall control signal produced by the mixed strategy controller, with both a drift and diffusion parts [21]. Therefore, the overall control effort is given using the result of Theorem 4.4 in [21] regarding the second-order stochastic integral in , by
However, by fixing , one can minimize just the effect of the deterministic control component for different values of , hence taking it as a design parameter.
The mixed strategy control parameters , are, therefore, determined by solving the matrix inequality (20) for , K and , where is found using line search.
6. A Numerical Example
Consider the third-order system of form (18) with a single nonlinearity in which
where and . This system is a slightly modified version of the third-order chaos generator model with a single nonlinearity considered in [22]. Further, the feasibility condition (20) was checked for different values of , with the aim of minimizing the level of attenuation . The numerical results obtained for three different values of R are presented in Table 1, together with the corresponding values of , , and of the overall control effort defined in (22), where the third line in the table represents the (almost) purely stochastic control case.
In Figure 1, the time responses of the three states and of the overall control effort corresponding to are presented. These plots are generated applying a null control ( ) for s and the mixed strategy control of form (21) for s. given in the caption of Figure 1 is defined as the largest real part of the eigenvalues of . It can be seen that, although the matrix is not Hurwitz, the system is stabilized due to the state-multiplicative noise component of the control. For comparison, Figure 2 depicts the (almost) purely stochastic control case.
7. Discussion
At this point, one may observe the lack of insight regarding the weighted induced norm relation of (5). To gain some insight, consider the above derivations, where
where and where
Here,
Completing to squares we, readily, obtain that
As , the RHS of the latter is maximized by , where we recall that . Keeping in mind that and the sector-bounds (4) on ensures , we see that the maximal value of is of the order . Namely, loosely speaking, the weighted -norm relation of (5) is closely related to the non-weighted -norm, with . In the limiting case of , it is actually related to the norm, which, in its discrete version of norm, measures the number of non-zero elements of . This may provide some explanation regarding the simulations in the previous numerical example, where SAR-based control using state-multiplicative noise nulls z most of the time.
8. Conclusions
The phenomenon of stochastic antiresonance (SAR) for a class of systems with sector-bounded nonlinearities has been utilized for the synthesis of a mixed strategy control that consists of a deterministic state-feedback and state-multiplicative noise serving as the random part of the control signal. The control design involves bilinear matrix inequalities, the solutions of which are supported by YALMIP [23], for example by using the nonconvex quadratic solver quadprogbb. The merits of the mixed strategy over the deterministic state feedback of state-multiplicative control noise are demonstrated using a simple example.The considered class of systems with sector-bounded nonlinearities correspond to a large number of practical applications. It’s applications can be expanded through the universal approximation theorem [24] to more general systems that have not a priori given in terms of sector-bounded nonlinearities. Such systems may be approximated with an arbitrarily small error, by neural networks with a single hidden layer, with, e.g., a tanh activation function and a linear output layer. One such example is the Morris–Lecar model [25] of a neuron. The application of SAR in this model and other similar ones will be considered in future research.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1Wellens T. Vyacheslav S. Buchleitner B. Stochastic resonance Rep. Prog. Phys.2004674510510.1088/0034-4885/67/1/R 02 · doi ↗
- 2Kalashnikov V.L. Chaotic, Stochastic Resonance, and Anti-Resonance Phenomena in Optics Resonance 20174708710.5772/intechopen.70737 · doi ↗
- 3Borkowski L.S. Multimodal transition and stochastic antiresonance in squid giant axonsar Xiv 20101006.1069 v 10.1103/Phys Rev E.82.04190921230315 · doi ↗ · pubmed ↗
- 4Sundeep S. Wang J.B. Griffo A. Alvarez-Gonzales F. Anti-resonance phenomenon and peak voltage stress within PWM inverter fed stator winding IEEE Trans. Ind. Electron.202168118261183610.1109/TIE.2020.3048286 · doi ↗
- 5Jeong W.B. Yoo W.S. Kim J.Y. Sensitivity analysis of anti-resonance frequency for vibration test control of a fixture KSME Int. J.2003171732173810.1007/BF 02983603 · doi ↗
- 6Kremer E. Stochastic Resonances and Antiresonances in Rotating Mechanisms Advances in Nonlinear Dynamics: Proceedings of the Second International Nonlinear Dynamics Conference (NODYCON 2021) Lacarbonara W. Balachandran B. Leamy M.J. Ma J. Tenreiro Machado J.A. Stepan G. NODYCON Conference Proceedings Series Springer International Publishing Cham, Switzerland 2022
- 7Stoica A.-M. Yaesh I. Stochastic Antiresonance for Systems with Multiplicative Noise and Sector-Type Nonlinearities Entropy 20242611510.3390/e 2602011538392370 PMC 10887940 · doi ↗ · pubmed ↗
- 8Cabrera J.L. Bormann R. Eurich C. Ohira T. Milton J. State-dependent noise and human balance control Fluct. Noise Lett.2001410711810.1142/S 0219477504001719 · doi ↗