Transferable situation recognition system for scenario-independent context-aware surgical assistance systems: a proof of concept
D. Junger, C. Kücherer, B. Hirt, O. Burgert

TL;DR
This paper presents a proof of concept for a flexible surgical situation recognition system that can be adapted to various operating room scenarios.
Contribution
The novelty lies in demonstrating a transferable, scenario-independent situation recognition system for surgical assistance.
Findings
The system's architecture supports compatibility, maintainability, and portability.
The SRS can be adapted to different scenarios through configurability and expandability.
The prototype shows potential for broader surgical applicability with further development.
Abstract
Surgical interventions and the intraoperative environment can vary greatly. A system that reliably recognizes the situation in the operating room should therefore be flexibly applicable to different surgical settings. To achieve this, transferability should be focused during system design and development. In this paper, we demonstrated the feasibility of a transferable, scenario-independent situation recognition system (SRS) by the definition and evaluation based on non-functional requirements. Based on a high-level concept for a transferable SRS, a proof of concept implementation was demonstrated using scenarios. The architecture was evaluated with a focus on non-functional requirements of compatibility, maintainability, and portability. Moreover, transferability aspects beyond the requirements, such as the effort to cover new scenarios, were discussed in a subsequent argumentative…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
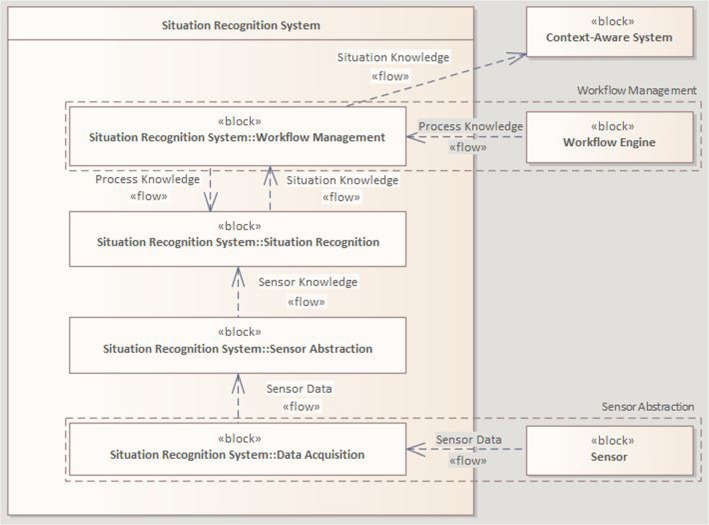 Figure 1
Figure 1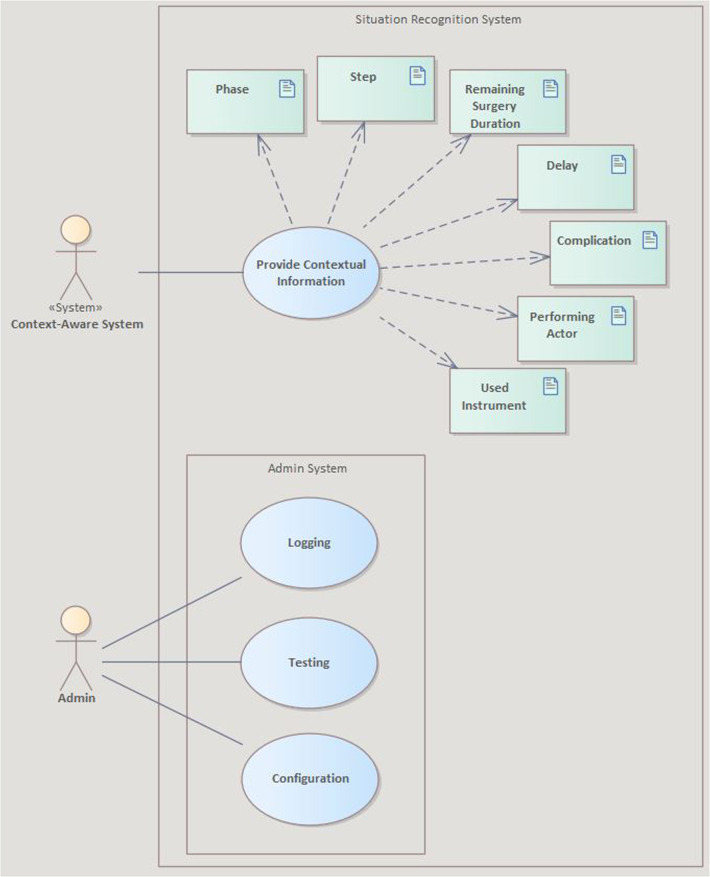 Figure 2
Figure 2- —Ministry of Science, Research and Arts Baden-Württemberg
Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsSurgical Simulation and Training · Augmented Reality Applications · Healthcare Technology and Patient Monitoring
Introduction
Surgical assistance systems support surgeons and the surgical team before, during, and after surgery. If these systems can adapt their functionality based on the environment and situation, e.g., provide filtered clinical information [1] or pending tasks [2], they are defined as being context-aware. The required context awareness can be achieved using data sources already present in the operating room (OR), e.g., endoscope [3] or medical devices [4], or additional sensor systems, e.g., RFID tracker [5]. Existing approaches mostly focus on supporting a specific surgical intervention with defined data sources [6]. As the intraoperative environment changes depending on different factors, e.g., the available data sources or sequence of the surgical intervention between the clinic or actors, solutions need to be adapted to different surgical settings. To reliably recognize contextual information and be aware of the intraoperative situation in different scenarios, transferability should be focused during system design.
Transferability to other scenarios is challenging and many different aspects need to be considered. In the context of intraoperative situation recognition, the main aspects to allow for an applicable and transferable system are: (1) surgical interventions and their variance, (2) surgical environments and their sensors, and (3) surgical situation recognition methods and their implementation. A widely applicable system therefore needs to be flexible on the sensor, recognition, and process layer, thus being able to react appropriately to deviating surgical processes and OR equipment within a scenario. Furthermore, the system needs to be transferable to similar scenarios with known processes or sensors, multiple process and sensor variants, as well as completely new scenarios, e.g., new interventions, sensors, or interpretation methods. Aspects such as configurability, interchangeability, and expandability are particularly relevant to enable applicability for multiple scenarios. The situation recognition system (SRS) of [7] addresses this need and will be the main subject of this work. The system is characterized by a generalized architecture that can be adapted incrementally. By emphasizing transferability beyond specific scenarios, we aim to create a modular framework that not only meets current requirements but also provides a foundation for seamless integration and adaption of scenarios.
Methods
Iterative development process
We follow an iterative development process, characterized by an incrementally refinement and enhancement throughout the research. Deriving from a state-of-the-art analysis [6], we concluded the need for a flexible SRS in the OR, defined requirements for subsequent development stages, and conducted a high-level concept for a modular system architecture [7]: The SRS shall gather and process data from various intraoperatively available sensors and be aware of knowledge about different interventions. Based on these, contextual information shall be formed and then provided to external context-aware systems (CAS). The concept follows software engineering best practices to realize adaptability and expandability, outlining the structure, components, and interfaces of the envisioned system. It consists of 4 layers: (1) Data Acquisition represents the sensors in the OR, (2) Sensor Abstraction realizes the coupling of sensors and sensor data interpretation, (3) Situation Recognition performs situation interpretation based on sensor and process knowledge, and (4) Workflow Management manages process information using a workflow engine and provides contextual information to CAS (see Fig. 1). Via listener interfaces, the SRS is acquiring sensor data. The core of the system is constructed of modules for interpreting the sensor data using distributed methods, rules, and machine learning (ML) components. Thereby, situation knowledge is retrieved based on the sensor knowledge, and process knowledge is incorporated via surgical process models depicting the course of surgical interventions. The situation knowledge is then provided to CAS. Building upon this concept, a basic framework prototype was developed as a tangible and functional representation of the envisioned system. The initial evaluation demonstrated the overall functionality successfully. In further development cycles, existing features can be refined and new functionalities be integrated via adaptions and extensions (e.g., SDC-based data provision [8] or transferable process models [9]). For more details on the conceptual architecture, please refer to [7].Fig. 1. SysML block definition diagram of the components and interfaces of the SRS, condensed representation of the conceptual architecture [7]
To verify that the SRS is applicable to different surgical settings and transferable to a new context, the evaluation method was specified. We did not find an applicable transferability score in the literature, but the assessment of the quality via non-functional requirements is an established method in software engineering that can be applied to assess transferability. Therefore, we performed a requirements analysis to identify non-functional aspects of the future system according to the ISO/IEC 25010 [10]. This standard defines eight characteristics to categorize product quality properties. The three categories compatibility, maintainability, and portability were stated to have a significant influence on maintenance tasks, therefore being relevant for transferability between scenarios and thus used to refine our requirements. Compatibility defines the degree to which the system and its components can exchange information with other systems or components, maintainability expresses the degree of effectiveness and efficiency with which the system can be modified, and portability describes the degree of effectiveness and efficiency with which the system and its components can be transferred to other environments. Furthermore, we applied the ISO/IEC/IEEE 29148 [11], defining guidelines and characteristics to ensure the quality of requirements. A total of 2 goals and 30 non-functional requirements were derived (see Table 2) for the use case depicted in Fig. 2.Fig. 2. SysML use case diagram of the interactions between users and the SRS
Furthermore, scenarios were integrated to demonstrate the variance of sensors, surgical interventions, and therefore interpretation logic the SRS can support (see Sect. ”Scenarios”). Based on the requirements and three main scenarios, the system was evaluated by the developer (see Sect. ”Functional evaluation”). The overall system was run as a demo prototype for the different sub-scenarios with an automatic sensor data simulation based on realistic data. Aspects that the defined scenarios cannot fully cover were evaluated using additional system tests. For the assessment, the requirements were contrasted to the successful sub-scenario execution as the primary evaluation method. Furthermore, logging details of the interpretation steps and the communication flow as well as code review to obtain further implementation details were used to assess the fulfillment of the requirements. Due to the lack of sufficient data to evaluate aspects like transferability to other clinics, the assessment beyond the requirements is covered by an argumentative evaluation (see Sect. ”Argumentative evaluation”). Thus, a multistage evaluation was realized using requirements, scenarios, and system analysis to assess the ability of the SRS to perform in different and new settings.
Scenarios
The scenarios listed in Table 1 cover a variety of interventions, sensors, and interpretation logic and serve as the main demonstrators. Each of these covers several sub-scenarios, e.g., by switching between data sources or process models. Further aspects not covered by the three scenarios (e.g., real sensor data via SDC) were evaluated by additional sub-scenarios.Table 1. Overview of the main scenarios of the SRSScenario 1Scenario 2Scenario 3Surgical interventionRobot-assisted minimally invasiveEsophagectomy (RAMIE)Laparoscopic Cholecystectomy (LC)Cochlea Implantation (CI)ProcessesDifferent procedures (step variance)Different procedures (process variants)Different procedures (step variance)GranularitiesPhases and stepsPhasesPhases and stepsProcess modeling standardsBPMN, CMMN, and combination modelBPMNBPMN, CMMN, and combination modelData sourcesInstrument and position recognition (simulation), step recognition (checklist)Phase recognition (simulation of phase flickering), endoscope (dataset), device data (simulation of thermoflator)Step recognition (checklist and simulation)Sensor data typesInstrument used and position of surgeon/assistant, name of the stepName of the phase, endoscope image (instrument used), device parameters of thermoflatorName of the stepData formatsSDC and JSONPNG and JSONSDC and JSONData provisionSDC interface and RESTful listenerRESTful listenerSDC interface and RESTful listenerCASOR-Pad and CAS simulation (SDC)CAS simulation (SDC)CAS simulation (SDC)Situation dataPhase, step, remaining surgery duration, delay, instrument, and actorPhase, instrument, and complicationPhase, step, remaining surgery duration, and delayInterpretation logic basisRulesRules and ML combinationRules
Scenario 1 was created based on the cooperation with the University Hospital Heidelberg [12] which provided comprehensive information on process steps, their sequence, and variance, as well as the used instruments and position of the surgeon and assistant in the respective steps. Thereby, data sources of instrument, position, and step recognition could be simulated realistically. Furthermore, rules for situation recognition and process models [9] could be derived. As exemplary CAS, the OR-Pad [13] was included. Scenario 2 was established based on a project of the University Hospital Munich [14] and the publicly available dataset CholecT50 [15]. Different process variants and sensor data, i.e., phase flickering outputs of [14], endoscope image of CholecT50, and exemplarily parameter of a thermoflator of [16], were integrated. In addition, rules were derived, and ML models were trained on different datasets, e.g., CholecT50 and Cholec80 [17]. Scenario 3 was created in cooperation with the University Hospital Düsseldorf based on the project for an intraoperative checklist [18], which was also used as a data source for step recognition due to the lack of intraoperative sensor data recordings. For the use case, comprehensive information on process steps, their sequence, and variance were provided to adapt process models [9].
Results
Functional evaluation
The evaluation resulted in 2 out of 2 completely fulfilled goals and 28 out of 30 fully met non-functional requirements. The results are depicted in Table 2 and are summarized in the following. Details of the assessment are found in the Online Resource 1. Different surgical interventions were simulated based on data from intraoperative sensors and process knowledge (/G01/). The SRS recognizes a variety of contextual information and serves CAS (/G02/).Table 2. Requirements analysis and functional evaluation of the SRS. G = Goal, N = Non-functional requirementNo.Goal or Non-functional requirementEvaluation Result/G01/The SRS recognizes the current situation of different surgical processes in the OR based on data from various intraoperatively available sensors and process knowledgeFulfilled/G02/The SRS provides external systems with contextual information about the current situation of an intervention in the ORFulfilledCompatibility/N01/The SRS shall connect all external systems (sensors, CAS) through loose couplingFulfilled/N02/The SRS shall exist in parallel to the OR infrastructureFulfilled/N03/The SRS shall communicate with the workflow engine via a REST interfaceFulfilled/N04/The SRS shall support process models in the modeling standards BPMN and CMMNFulfilled/N05/The SRS shall communicate with sensors via specified interfaces (e.g., SDC)Fulfilled/N06/The SRS shall be demonstrable with simulated sensorsFulfilled/N07/The SRS shall enable processing data from at least 4 data sources for a scenarioFulfilled/N08/The SRS shall communicate with CAS via an SDC interfaceFulfilled/N09/The SRS shall enable to provide data to at least 2 CAS in a scenarioFulfilledMaintainability/N10/The SRS shall enable the exchange of the workflow engineFulfilled/N11/The SRS shall enable the exchange of process models via the workflow engine for the same interventionFulfilled/N12/The SRS shall enable the exchange of sensors within a sensor typeFulfilled/N13/The SRS shall enable the exchange of interpretation logicFulfilled/N14/The SRS shall enable to interpret and provide situation data independently of the CAS currently in useFulfilled/N15/The SRS shall apply interpretation logic across scenarios if reasonableFulfilled/N16/The SRS shall enable to import existing process modelsPartly fulfilled/N17/The SRS shall enable to import existing, trained ML modelsFulfilled/N18/The SRS shall provide clear and traceable log entries for information, warnings, and errorsFulfilled/N19/The SRS shall log additional information according to the configured logging level (debug) during administrative useFulfilled/N20/The SRS shall allow the integration of process models via a workflow engine and knowledge for the intervention via a data management componentFulfilled/N21/The SRS shall allow the connection of sensors via an interface and the adaptation of sensor configurations via a data management componentFulfilled/N22/The SRS shall allow the integration and extension of interpretation logic via modulesFulfilled/N23/The SRS shall offer a GUI for simulating sensor data for testing purposes during administrative useFulfilled/N24/The SRS shall include a CAS simulation for testing purposes for administrative useFulfilled/N25/The SRS shall use a test dataset for ML-based approaches for testing purposes during administrative useFulfilledPortability/N26/The SRS shall enable to add a new scenario, particularly concerning intervention types and sensor typesFulfilled/N27/The SRS shall enable changes to existing process models, connected sensors, and integrated interpretation logic (e.g., ML model) within a scenarioFulfilled/N28/The SRS shall enable the registration and use of available, compatible sensorsFulfilled/N29/The SRS shall allow the configuration of its functionality (connection to the server, intervals, …) via outsourced constantsPartly fulfilled/N30/The SRS shall be replaceable by a new instance with a different configurationFulfilled
Compatibility
Different interfaces to sensors are integrated into the SRS, including a RESTful listener, an SDC-based device discovery, and a publish-subscribe SDC interface (/N05/). Sensor data can be simulated via a user interface (/N06/). At least 5 data sources can be used simultaneously, providing single- or multi-sensor data (/N07/). Using SDC interface metrics, several CAS can subscribe to desired information simultaneously (/N08/, /N09/). Sensors and CAS can be coupled and decoupled via listeners and SDC interface, respectively (/N01/). The SRS runs in the research OR with other systems without recognizable restrictions (/N02/). The system communicates with the Camunda Workflow Engine [19] via a REST API interface [20] (/N03/). Process models in BPMN, CMMN, and combination models are supported (/N04/).
Maintainability
Sensors are assigned to a sensor data type to distribute data to suitable modules of the SRS and can therefore be exchanged (/N12/). Data of every available, configured sensor is automatically incorporated using the system’s implemented listener interfaces (/N21/). Interpretation modules and methods can be exchanged and adapted (/N13/, /N22/). New or modified process models can be integrated via the workflow engine and adaptions to relations, rules, etc. made within data management components (/N11/, /N20/). Due to the REST API interface, the workflow engine can be exchanged, too (/N10/). The SRS continuously interprets knowledge about sensors, processes, and situations (/N14/). The rule- and ML-based interpretation logic is uniformly used for all scenarios but also scenario-specific rules can be defined (/N15/). To reuse established work, trained and tested ML models can be integrated (/N17/, /N25/). Also, process models can be reused but require minimal adjustments for integration (/N16/). To track the system behavior, information is logged in a standardized format at different logging levels, including debug mode (/N18/, /N19/). Furthermore, a GUI for sensor data simulation, defined test cases, and a CAS simulation subscribing to all metrics are available (/N23/, /N24/).
Portability
Scenarios can be added and adapted within the SRS (/N26/). Therefore, components and knowledge can be integrated, customized, and exchanged (/N27/). Available, compatible sensors can be registered (/N28/). Outsourced constants (e.g., weightings) allow the configuration of scenarios but no scenario-specific configuration or user interface is provided (/N29/). A new instance can be used with modified settings for the scenarios (/N30/).
Argumentative evaluation
Because it is impossible to cover all aspects of transferability with test scenarios, we are giving further arguments in this section.
Supported scenarios
The scenarios RAMIE, LC, and CI represent realistic demonstrators for the functionality and usability of the prototype, but also other scenarios are supported. Thus, a wide range of variations is covered, offering a versatile platform for demonstrating integrated scenarios. Due to the modular architecture, multiple sensors can be connected, the data are processed in corresponding modules, and different process models and variants can be executed. Switching between supported scenarios requires minimal administrative steps, e.g., to configure the ML model or ensure the connection to sensors and CAS.
Effort for new scenarios
The effort for integrating new scenarios or functionalities can vary depending on the complexity and wealth of previously integrated aspects. In the best case, the new scenario is close to an existing scenario, so that the SRS’ functionality can be reused. Otherwise, parts of the functionality have to be modified by adapting or exchanging components. Table 3 shows the main components to identify whether a new scenario can already be supported or adaptions are required. In summary, suitable sensors, interpretation logic, and process information must be available. By integrating further scenarios, the system's complexity will increase, and required adaptations be reduced.Table 3. Components to check required scenario adaptions and extensionsLayerAspectRequired, otherwise, be changedSensor AbstractionSensor and listenerSensor interfacesData managementManagement of sensors (sensor registry)Interpretation logic (incl. Sensor Knowledge)Support of sensor (data) type and data format, functionality of modules/methods, coverage of rules and ML modelsSituation RecognitionInterpretation logic (incl. Situation Knowledge)Functionality of modules/methods, support of CAS goalsData managementManagement of intervention information and rulesWorkflow ManagementWorkflow engine and interpretation logic (incl. Process Knowledge)Process models, functionality of methodsCASFunctionality of the SDC interface (metrics)
Configurability, interchangeability, and expandability
The modular architecture plays a decisive role in coping with changing scenarios. In many cases, configurative adjustments, e.g., change sensors or adapt intervals, can be done by an administrator. In contrast, the integration of new functionalities, e.g., support new sensors, requires to involve system experts to add, modify, or exchange components. Following software engineering best practices, the SRS provides key aspects to achieve adaptability: (1) Encapsulation of functionalities in components, (2) data exchange independent of the internal structure, (3) communication via interfaces with uniform data classes, and (4) central management of constants and general functions. Thus, components can be interchanged and expanded without affecting the whole system.
Flexibility of the layers
The scenarios demonstrate that surgical interventions in different variants, a variety of sensor configurations, and different interpretation logic are supported (see Table 1). Thus, the SRS is not limited to a specific scenario but is scenario-independent. Particularly, the usage of generalized and scenario-specific CMMN models [9] gives an outlook on better transferability of process information, whereas the sensor registry and type-specific processing enhance sensor usage on availability. Overall, it nevertheless must be assured for deviating scenarios that depending information and components are covered (see Table 3).
Discussion
Applicability and transferability
The scenarios demonstrate the versatility of the architecture, dealing with different data inputs and surgical interventions to react flexibly to other settings. The SRS uses all resources available to generate multi-faceted sensor knowledge. Thereby, generalized and case-specific interpretation logic can principally be used, switched, and combined to deal with the diversity and variety of data. The combination of sensor and process knowledge enables comprehensive situation recognition for different surgical processes. By addressing compatibility, maintainability, and portability, the system is applicable to different integrated scenarios, but also the transfer to deviating situations can be derived. The fulfilled requirements and argumentation highlighted the characteristics to support convenient adaption. For scenarios with similar surgical settings, many of the existing components may be reused to reduce the integration effort. For completely different scenarios, the architecture provides integration support via layers and modules, so that the system can be adapted target-oriented to deviating processes and OR equipment. Concluding, applicability is given as different sensors, logic, and process variants are supported for the integrated scenarios. Moreover, transferability between scenarios is possible due to the easy adaptability for new scenarios and deviating surgical settings. This enables a flexible, transferable situation recognition for different interventions and sensors that adapts to changing requirements and supports widely applicable CAS.
Based on [6], existing approaches are strongly tailored and therefore limited to specific scenarios. Although a few of the existing approaches deal with multiple sensors (e.g., [21, 22]) or show their performance with other datasets (e.g., [23, 24]), the transferability is not shown sufficiently at different levels. In contrast, our SRS was particularly designed to support a variety of data sources and surgical interventions and be easily adaptable, emphasizing features that transcend the scope of specific implementations. This flexibility is possible due to the layers and modules that work independently of the data source and are not limited to a specific surgical domain. While the architecture stays the same, only scenario-relevant components are used in the specific surgical setting. Thus, the SRS offers a platform for different scenarios and addresses increased flexibility and adaptability to further surgical settings. Compared to specified approaches, lower implementation efforts are expected for new scenarios as the architecture already exists, components can be reused, and functionalities are outsourced to enable efficient adaptions and extensions. In summary, the SRS offers a clear advantage over specific approaches due to its architecture, which is geared toward transferability.
Validity of the results
The validity of the results is assessed according to [25]. Internal validity refers to the extent to which valid conclusions can be derived from the evaluation. The prototype was implemented based on the general concept and evaluated by the developer using specific scenarios. Thereby, the input was known and sufficient knowledge of the SRS was available. Expert knowledge may have influenced the assessments of the architecture but is also a prerequisite for adaptions. External validity refers to the extent to which the evaluation results can be generalized. The SRS can operate in different scenarios but is not restricted to these. The evaluation highlights the necessary compatibility, maintainability, and portability to realize transferability to other contexts. The realistic scenarios are representative examples, so the results can be transferred to real conditions. Conclusion validity refers to the extent to which correct conclusions can be derived from the evaluation. The prototype was evaluated based on requirements, scenarios, and system analysis. Despite the lack of data, the evaluation covers all relevant aspects to assess the SRS’ ability. The transfer to real scenarios and evaluation in a surgical environment is not affected by the actual implementation. Construct validity refers to the extent to which the evaluation method can measure theoretical concepts. The chosen evaluation method was multistaged. A functional evaluation based on transferability-relevant requirements and scenarios covering different surgical settings was used to prove the transferability. A complemented argumentative evaluation assessed the transferability beyond the requirements. The chosen approach represents a comprehensive and appropriate procedure for evaluating the SRS.
Limitations
One of the biggest pitfalls in developing the prototype was the lack of diverse clinical data to cover the information needed at all layers. Although there are selected, freely accessible datasets, these are mainly based on video data (not multimodal data) and, e.g., do not provide detailed information about the surgical intervention process. This lack of available, sufficient data are also stated in other work (e.g., [26–28]) although research is already addressing the representation of greater diversity (e.g., [29, 30]). Hence, the scenarios were realized based on real data from clinical cooperation combined with available datasets to simulate sensor data, implement exemplary interpretation logic, and model clinic-specific process models. Insufficient aspects were enriched exemplary based on observations or logic. As a result, the structure and process chain were realized and a wide range of scenarios were covered. The depicted limitations can be resolved by adapting and expanding the scenarios and functionality in further development cycles. Based on multimodal data, extensive tests would become possible to further investigate the transferability ability, dealing with the diversity and variety of the surgical sensor and process data.
While the prototypical implementation contains specific technical details and limitations, the architectural concept provides the foundation and vision for a flexible and adaptable system that addresses various transferability challenges. Nevertheless, customization or preparatory work will be required before the SRS can be used in a new environment, as the system cannot be capable of everything. It is essential to create specific process models for each new intervention, add interfaces for unknown sensors or, if necessary, train new ML models and define rules to ensure the functionality of the SRS. The depicted SRS can be used in a variety of scenarios and can be adapted to changing requirements with reasonable effort. Compared to systems not designed for transferability, our SRS uses an established modular system design and specifically addresses transferability-relevant requirements engineering characteristics. Nevertheless, as the variability of the necessary adaptations and the lack of comparability do not allow quantifying transferability, the effort can only be predicted as reasonable based on the assessment in this paper.
Conclusion
Transferability is crucial for versatility and efficiency. The proposed system architecture depicts the approach of a scenario-independent SRS and is characterized by its modularity and adaptability. The framework prototype demonstrates the implementation of the concept, covering a selection of possible sensor variations or interventions. It provides a fundamental platform that, in contrast to scenario-specialized systems, was designed for different settings and can be adapted to new scenarios with expected lower effort. The evaluation method, including a functional and argumentative evaluation, assesses the applicability and transferability of the SRS to different surgical settings. The results show that the architecture is feasible and specifically supports a flexible and transferable SRS that can adapt to environmental changes, can easily be expanded to different surgical settings, and thus enable widely applicable CAS. This proof of concept provides a promising outlook on the possibilities of an SRS that supports many types of intervention and sensor systems and has the required compatibility, maintainability, and portability for new scenarios. In further research, components can be gradually optimized or supplemented to improve interpretation logic and support further scenarios for clinical usage. We assume, that a modular SRS that can be transferred to new scenarios is a key factor in bringing intelligent context-aware surgical assistance systems into clinical routine.
Supplementary Information
Below is the link to the electronic supplementary material.Supplementary file1 (DOCX 38 KB)
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1Avrunin GS, Clarke LA, Conboy HM, Osterweil LJ, Dias RD, Yule SJ, Goldman JM, Zenati MA (2018) Toward improving surgical outcomes by incorporating cognitive load measurement into process-driven guidance. Softw Eng Healthc Syst SEHS IEEE ACM Int Workshop 2018:2–9. 10.1145/3194696.319470510.1145/3194696.3194705 PMC 610322330140792 · doi ↗ · pubmed ↗
- 2Camunda (2021) BPMN Workflow Engine. https://camunda.com/platform-7/workflow-engine/. Accessed 09 Jan 2024
- 3Camunda Services Gmb H (2021) Rest Api Reference: Camunda Docs. https://docs.camunda.org/manual/7.9/reference/rest/. Accessed 09 Jan 2024