Enhancing Underwater Images of a Bionic Horseshoe Crab Robot Using an Artificial Lateral Inhibition Network
Yuke Ma, Liang Zheng, Yan Piao, Yu Wang, Hui Yu

TL;DR
This paper introduces an underwater image enhancement method inspired by the compound eye of a bionic horseshoe crab robot, improving contrast and target recognition in low-resource environments.
Contribution
A novel artificial lateral inhibition network (ALIN) is proposed for underwater image enhancement, inspired by biological systems and optimized for low energy and high efficiency.
Findings
ALIN effectively enhances contrast between highlight and shadow areas in underwater images.
The ALIN outperforms traditional algorithms in emphasizing key image features and suppressing non-informative pixels.
The BHCR successfully maneuvers and identifies targets underwater using ALIN-enhanced images.
Abstract
This paper proposes an underwater image enhancement technology based on an artificial lateral inhibition network (ALIN) generated in the compound eye of a bionic horseshoe crab robot (BHCR). The concept of a horizontal suppression network is applied to underwater image processing with the aim of achieving low energy consumption, high efficiency processing, and adaptability to limited computing resources. The lateral inhibition network has the effect of “enhancing the center and suppressing the surroundings”. In this paper, a pattern recognition algorithm is used to compare and analyze the images obtained by an artificial lateral inhibition network and eight main underwater enhancement algorithms (white balance, histogram equalization, multi-scale Retinex, and dark channel). Therefore, we can evaluate the application of the artificial lateral inhibition network in underwater image…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
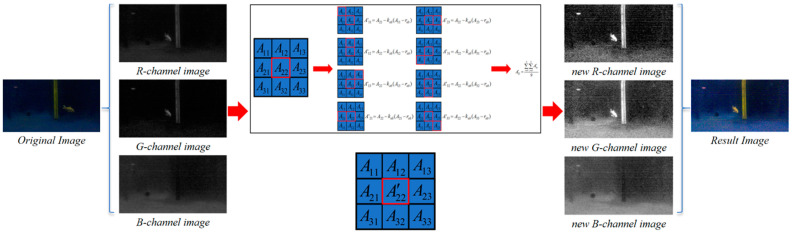 Figure 1
Figure 1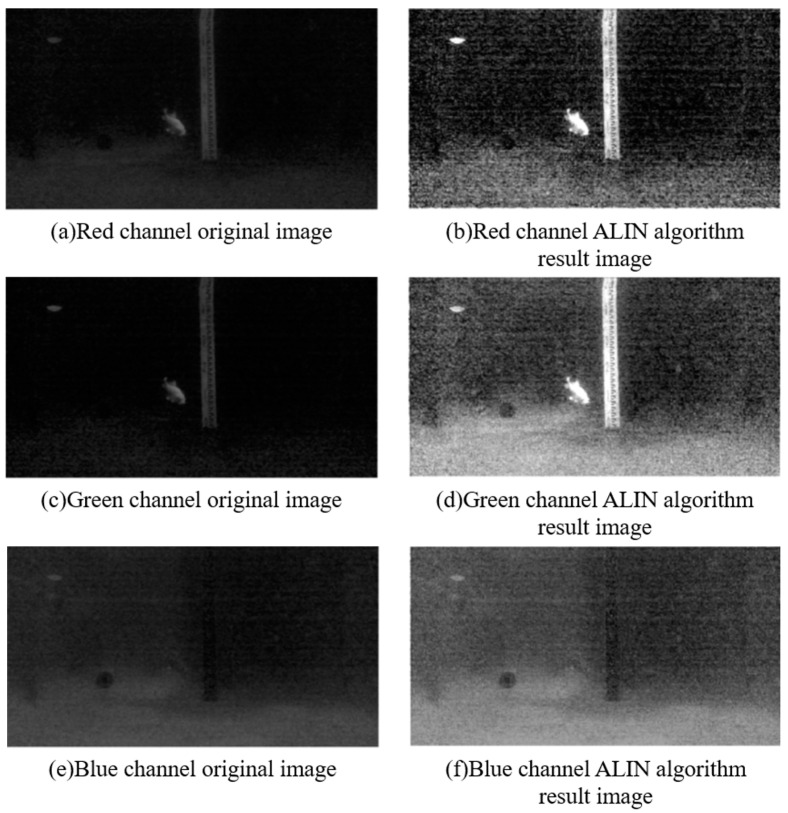 Figure 2
Figure 2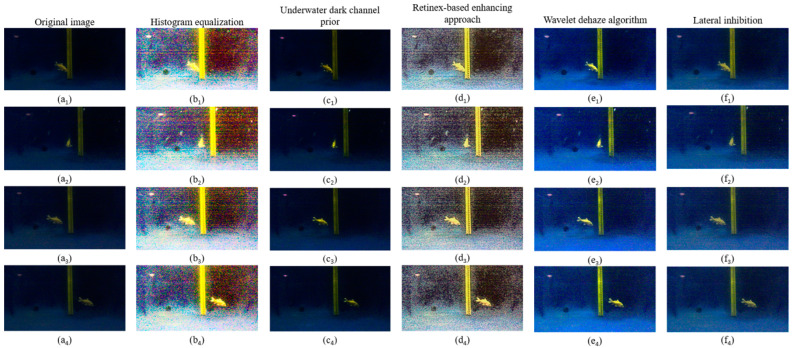 Figure 3
Figure 3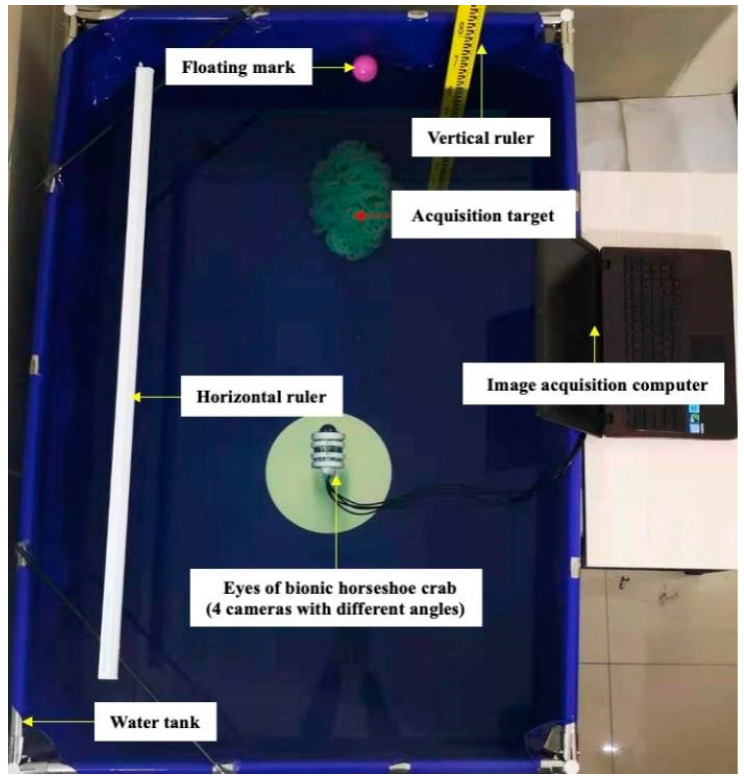 Figure 4
Figure 4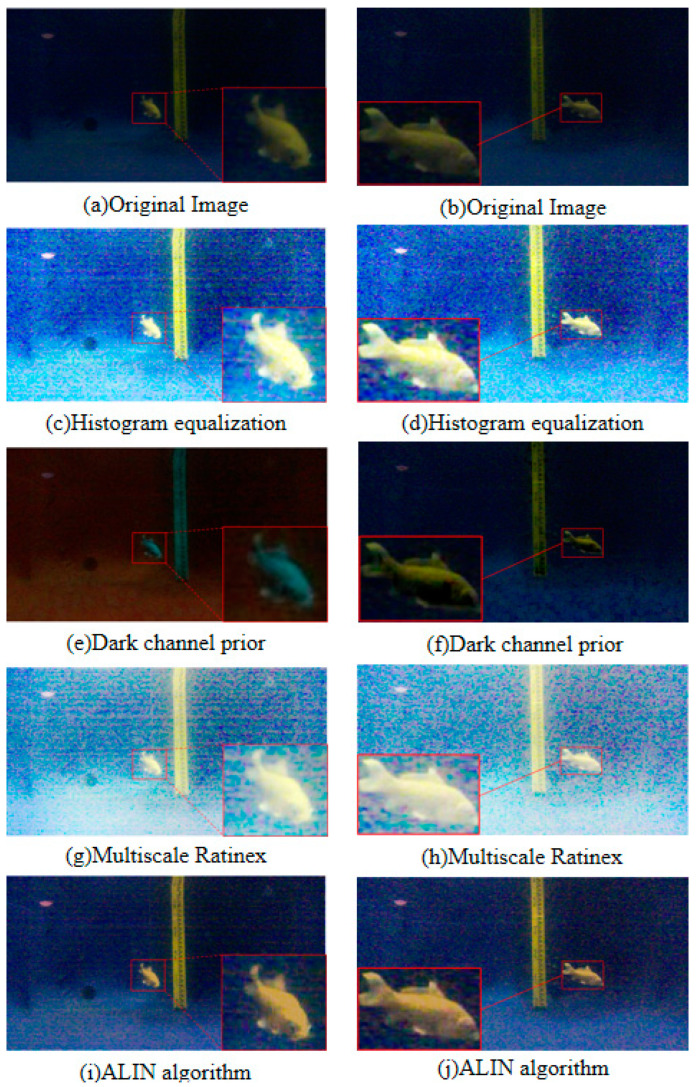 Figure 5
Figure 5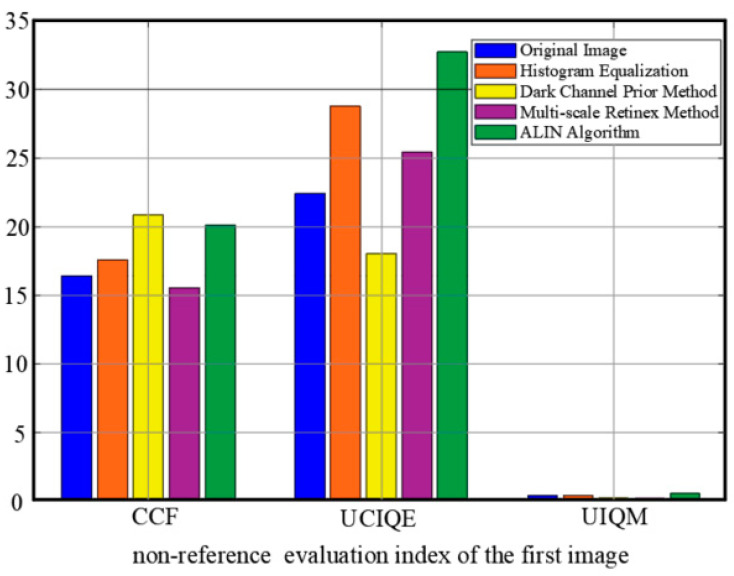 Figure 6
Figure 6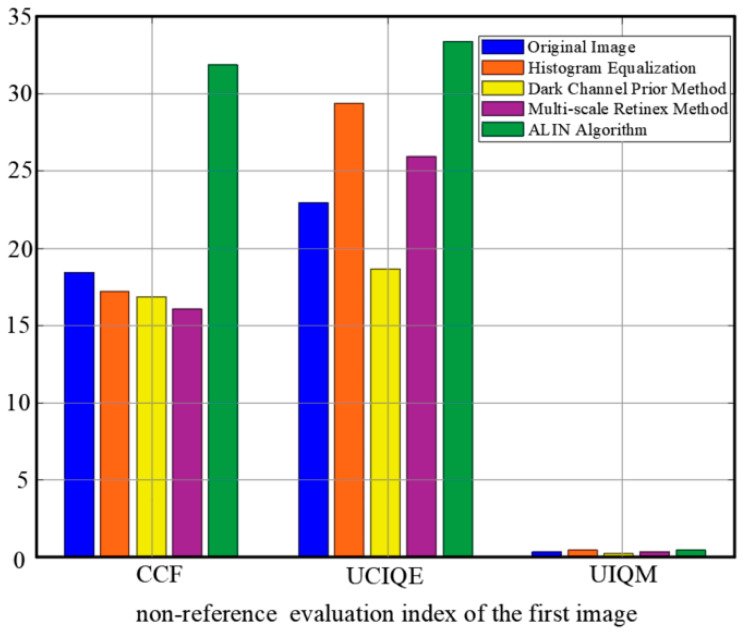 Figure 7
Figure 7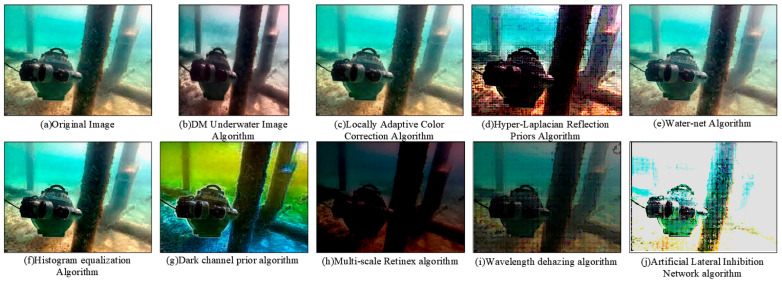 Figure 8
Figure 8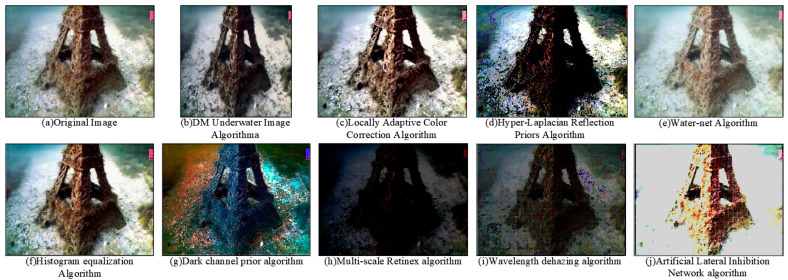 Figure 9
Figure 9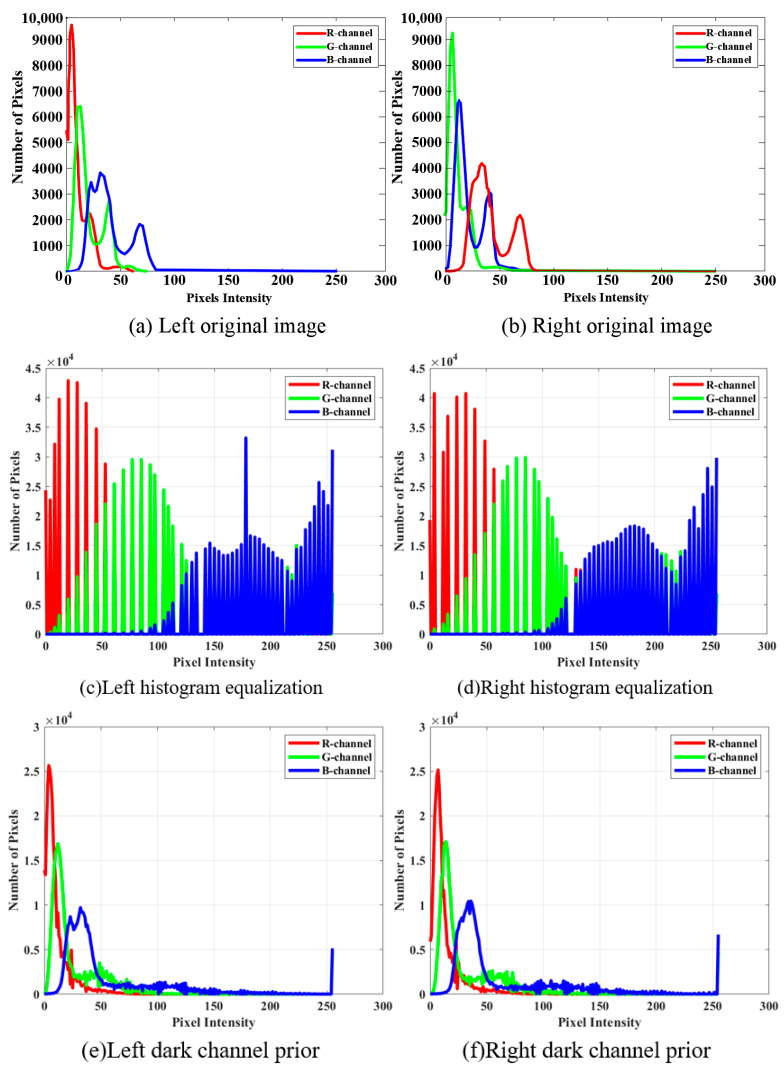 Figure 10
Figure 10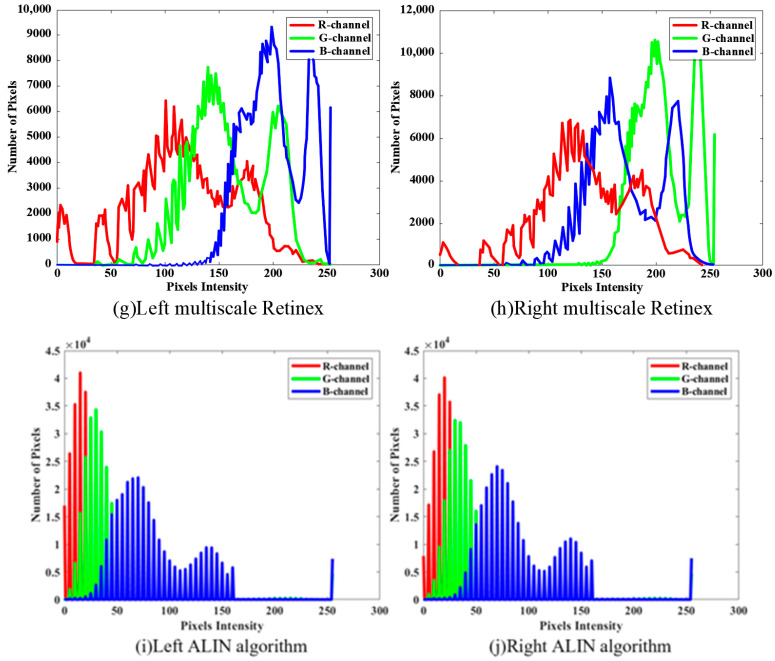 Figure 11
Figure 11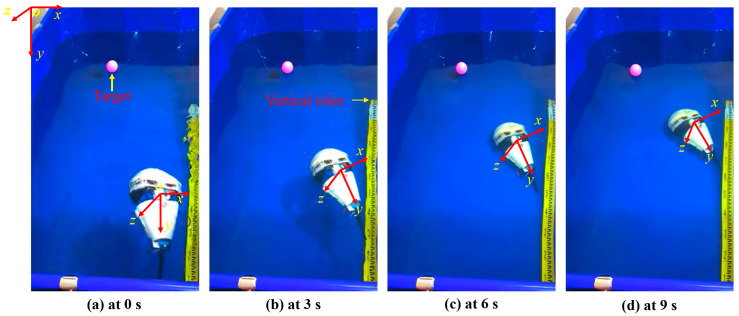 Figure 12
Figure 12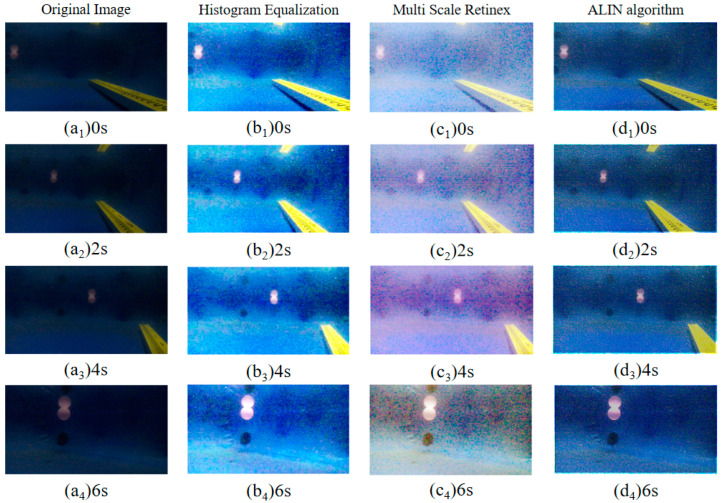 Figure 13
Figure 13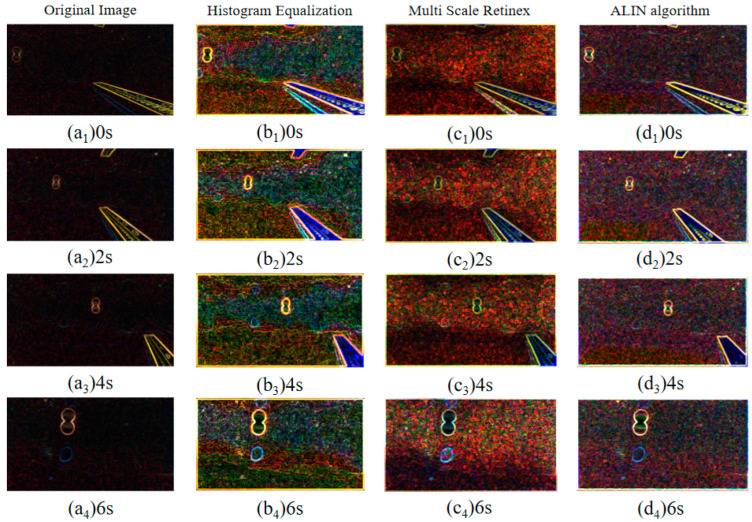 Figure 14
Figure 14Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsUnderwater Vehicles and Communication Systems · Robotics and Sensor-Based Localization · Water Quality Monitoring Technologies