Task Planning of Multiple Unmanned Aerial Vehicles Based on Minimum Cost and Maximum Flow
Xiaodong Shi, Xiangping Zhai, Rui Wang, Yi Le, Shuang Fu, Ningzhong Liu

TL;DR
This paper introduces a new method for using drones and trucks together to improve delivery efficiency and reduce energy use.
Contribution
The novel contribution is a cooperative delivery scheme using minimum-cost maximum-flow algorithms for UAVs and trucks.
Findings
The proposed method reduces total energy consumption by 11.53% and 9.15% under different task scenarios.
Combining UAVs with trucks extends coverage and improves delivery completion rates in wide-area regions.
Abstract
With the rapid development of UAV technology, UAV delivery has gained attention for its potential to reduce labor costs. However, limitations in load capacity and energy restrict UAVs’ distribution capabilities. This paper proposes a cooperative delivery scheme combining traditional trucks and UAVs to extend UAV coverage and improve delivery completion rates. For densely distributed depots in wide-area regions, we develop algorithms for task allocation and path planning in a truck-independent UAV system. Specifically, a minimum-cost, maximum-flow model is constructed to obtain sub-paths covering all delivery tasks, and resource tree-based algorithms are used to construct global paths for UAVs and trucks. Simulation results show that our algorithms reduce total energy consumption by 11.53% and 9.15% under different task points, which suggests that our proposed method can significantly…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
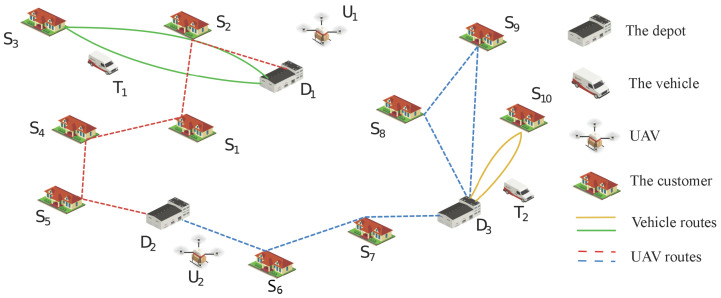 Figure 1
Figure 1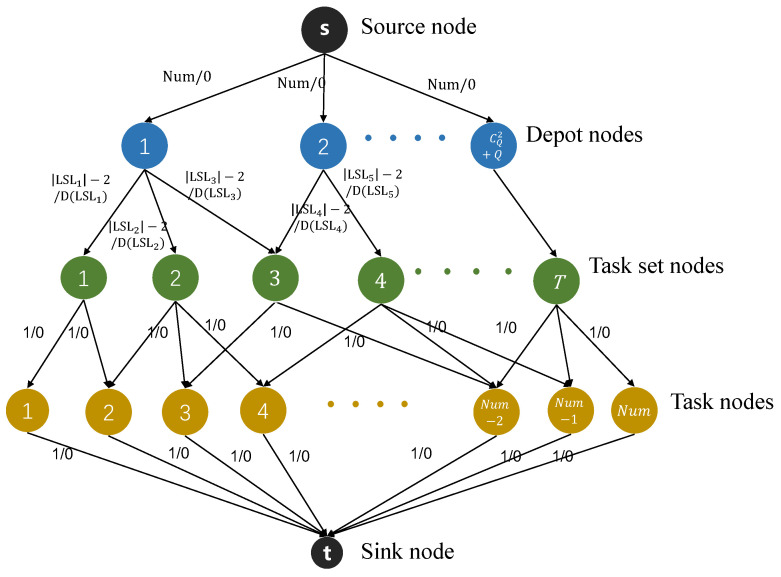 Figure 2
Figure 2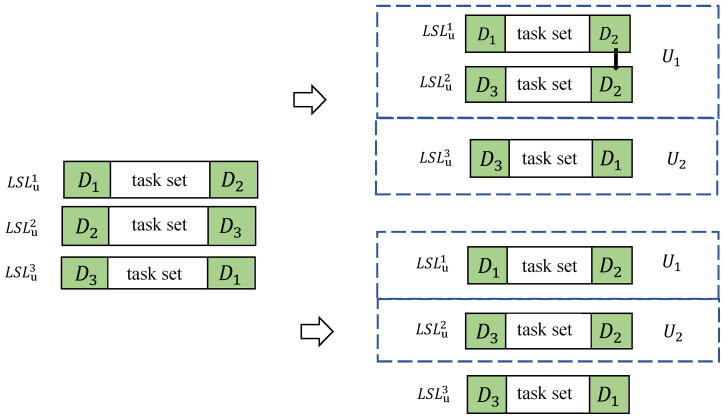 Figure 3
Figure 3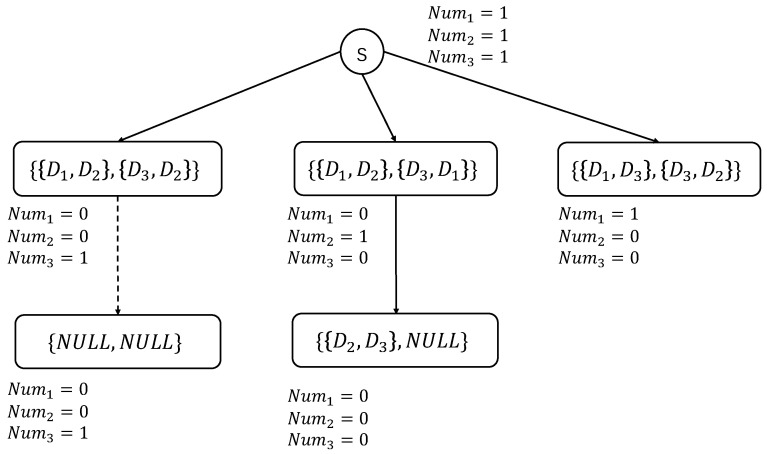 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsUAV Applications and Optimization · Robotic Path Planning Algorithms · Smart Parking Systems Research