Pose Estimation of Coil Workpieces by Automated Overhead Cranes Using an Improved Point Pair Features Algorithm
Yongbo Zhuang, Jianli Man, Yuchen Jiang, Qingdang Li, Mingyue Zhang

TL;DR
This paper improves pose estimation for coil workpieces using an enhanced algorithm, enabling more efficient crane operations in port storage areas.
Contribution
A novel point cloud registration algorithm combining PPF and GICP for improved pose estimation of coil workpieces.
Findings
The proposed algorithm achieves average pose estimation errors of 1.1% for one, two, and three coils.
Processing times for one, two, and three coils are 3.6 s, 3.4 s, and 4.7 s, respectively.
The algorithm meets practical application requirements in terms of accuracy and timing.
Abstract
To facilitate the automation of crane operations for grabbing coil stacks in port storage areas, thereby streamlining the processes of warehousing, stacking, and transshipment for enhanced operational efficiency, this paper utilizes algorithms related to 3D point clouds for the pose estimation of coil workpieces. To overcome the limitations of the traditional point pair feature (PPF) algorithm, a novel point cloud registration algorithm is introduced. This algorithm harnesses the advantages of the PPF algorithm in describing local features and integrates it with the Generalized Iterative Closest Point (GICP) algorithm to enhance the robustness and applicability of registration. Finally, comparative experiments demonstrate that the proposed algorithm delivers superior performance. The average pose estimation errors for one, two, and three coils are 1.1%, 1.1%, and 1.2% of the coil size,…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4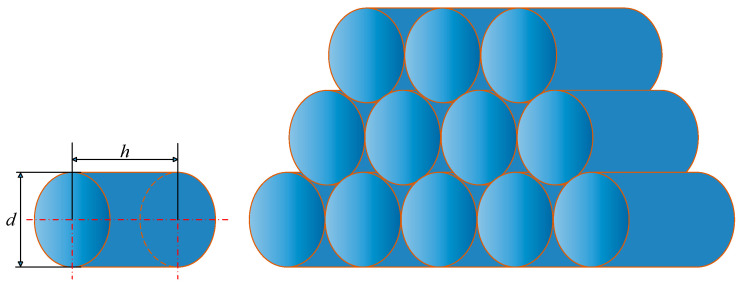 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7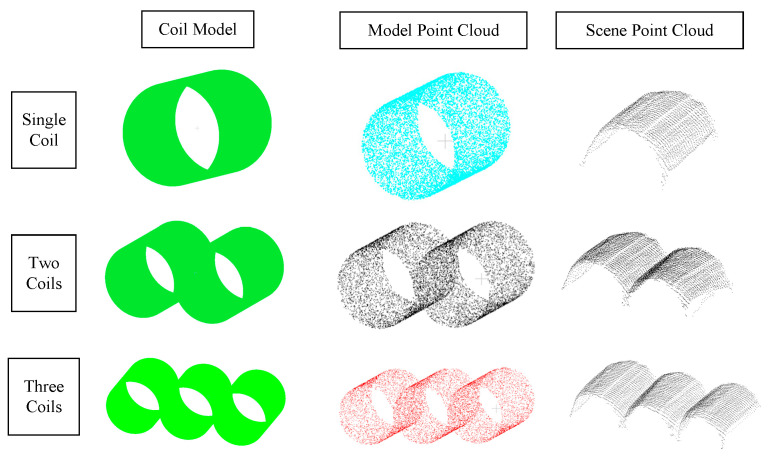 Figure 8
Figure 8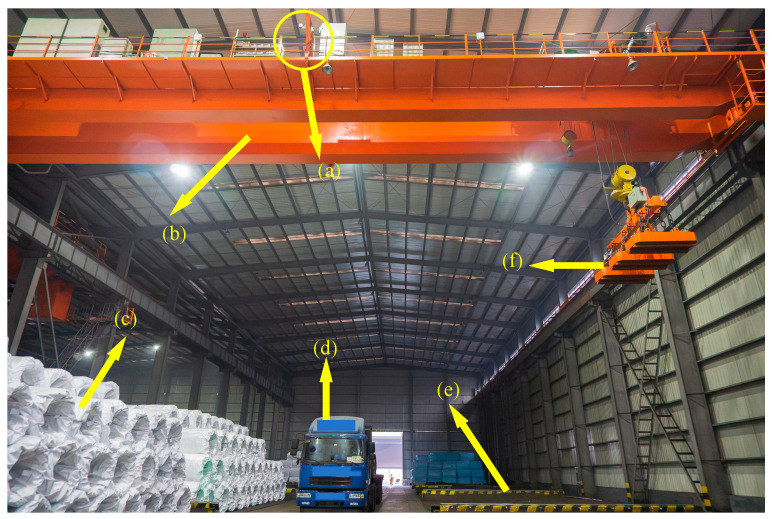 Figure 9
Figure 9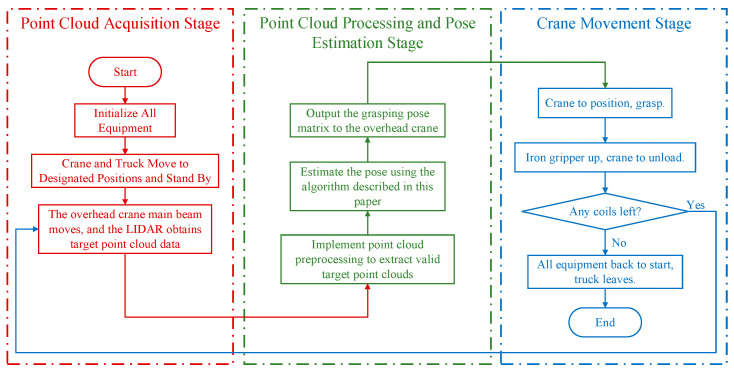 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13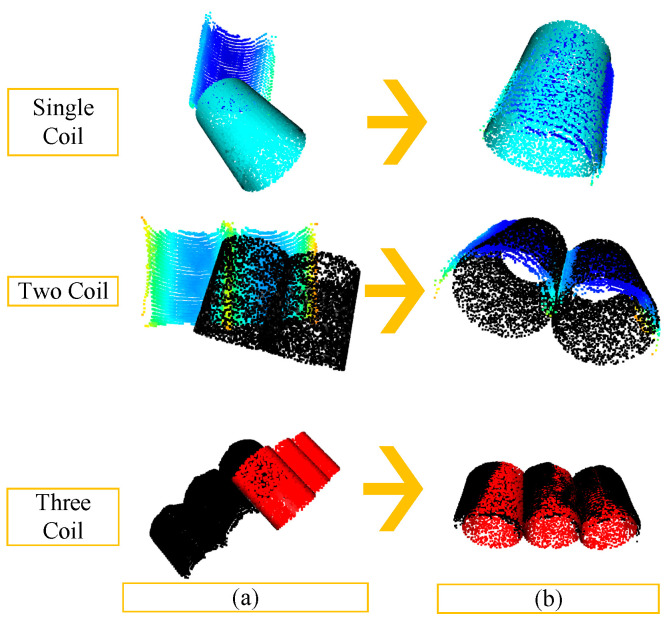 Figure 14
Figure 14Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
Topics3D Surveying and Cultural Heritage · Robotics and Sensor-Based Localization · Optical measurement and interference techniques