A Study on Multi-Robot Task Allocation in Railway Scenarios Based on the Improved NSGA-II Algorithm
Yanni Shen, Jianjun Meng

TL;DR
This paper proposes an improved algorithm for multi-robot task allocation in railway maintenance to optimize efficiency and reduce costs.
Contribution
The study introduces a hybrid NSGA-II and MOPSO algorithm with dynamic task planning and adaptive parameters for railway scenarios.
Findings
The proposed algorithm reduces makespan and total travel distance for railway maintenance robots.
Dynamic task planning and multi-elite archive strategy improve solution diversity and prevent premature convergence.
Experiments confirm the algorithm's effectiveness in varying task sizes and robot quantities.
Abstract
With the advent of Industry 4.0, the seamless integration of industrial systems and unmanned technologies has significantly accelerated the development of smart industries. However, the research on task allocation for railway maintenance robots remains limited, particularly with respect to optimizing costs and efficiency within smart railway systems. To address this gap, the present study explores multi-robot task allocation for automated orbital bolt maintenance, aiming to enhance operational efficiency by minimizing both makespan and total travel distance for all robots. To achieve this, an improved hybrid algorithm combining NSGA-II and MOPSO is proposed. Initially, a dynamic task planning method, tailored to the specific conditions of railway operations, is developed. This method uses the coordinates of track bolts to extract environmental features, enabling the dynamic partitioning…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1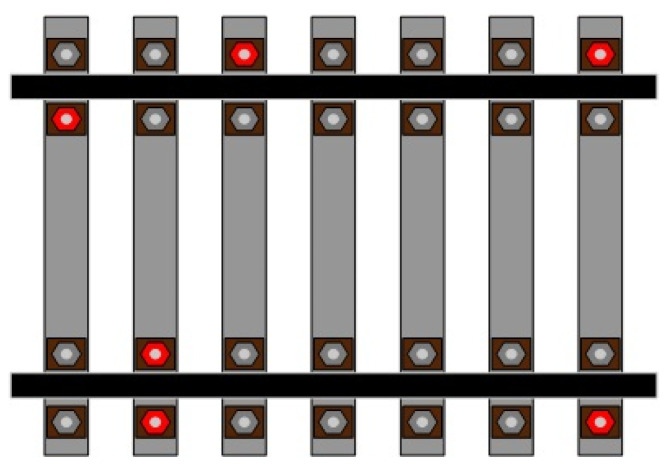 Figure 2
Figure 2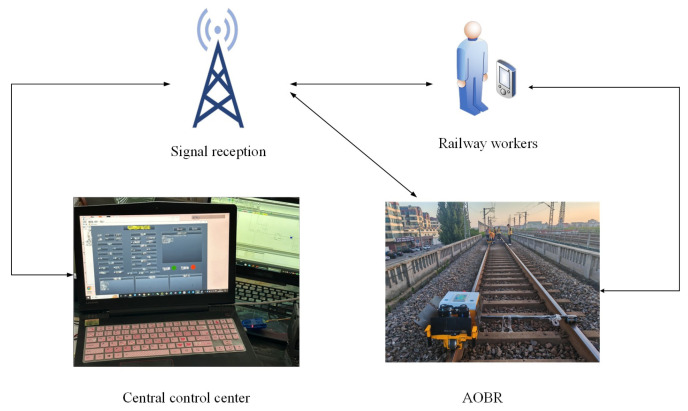 Figure 3
Figure 3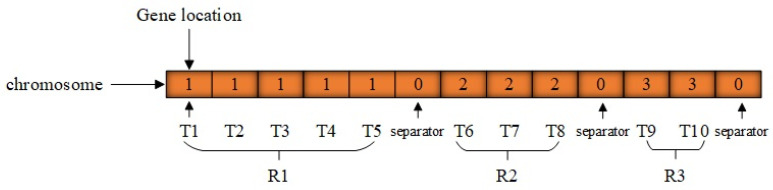 Figure 4
Figure 4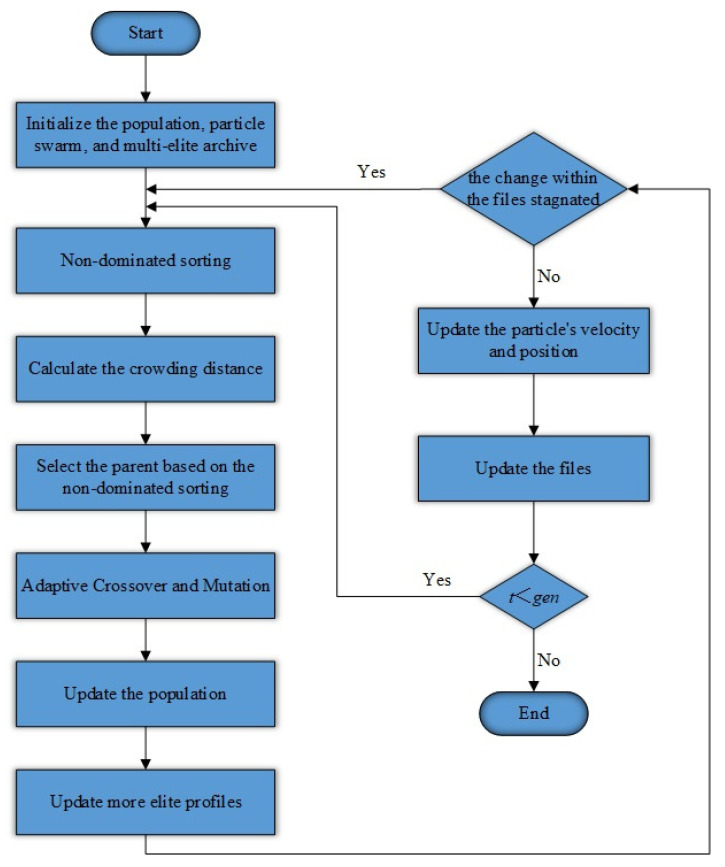 Figure 5
Figure 5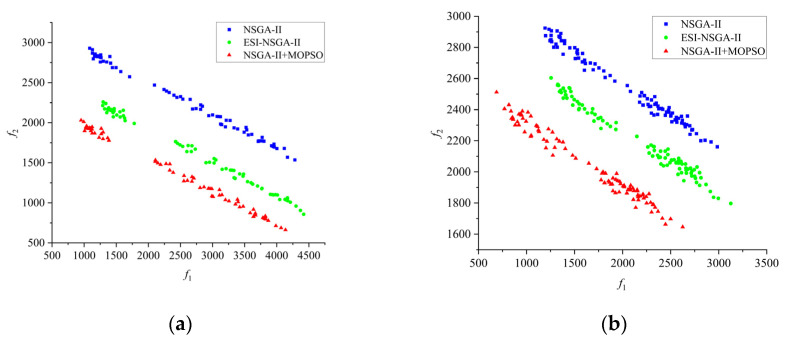 Figure 6
Figure 6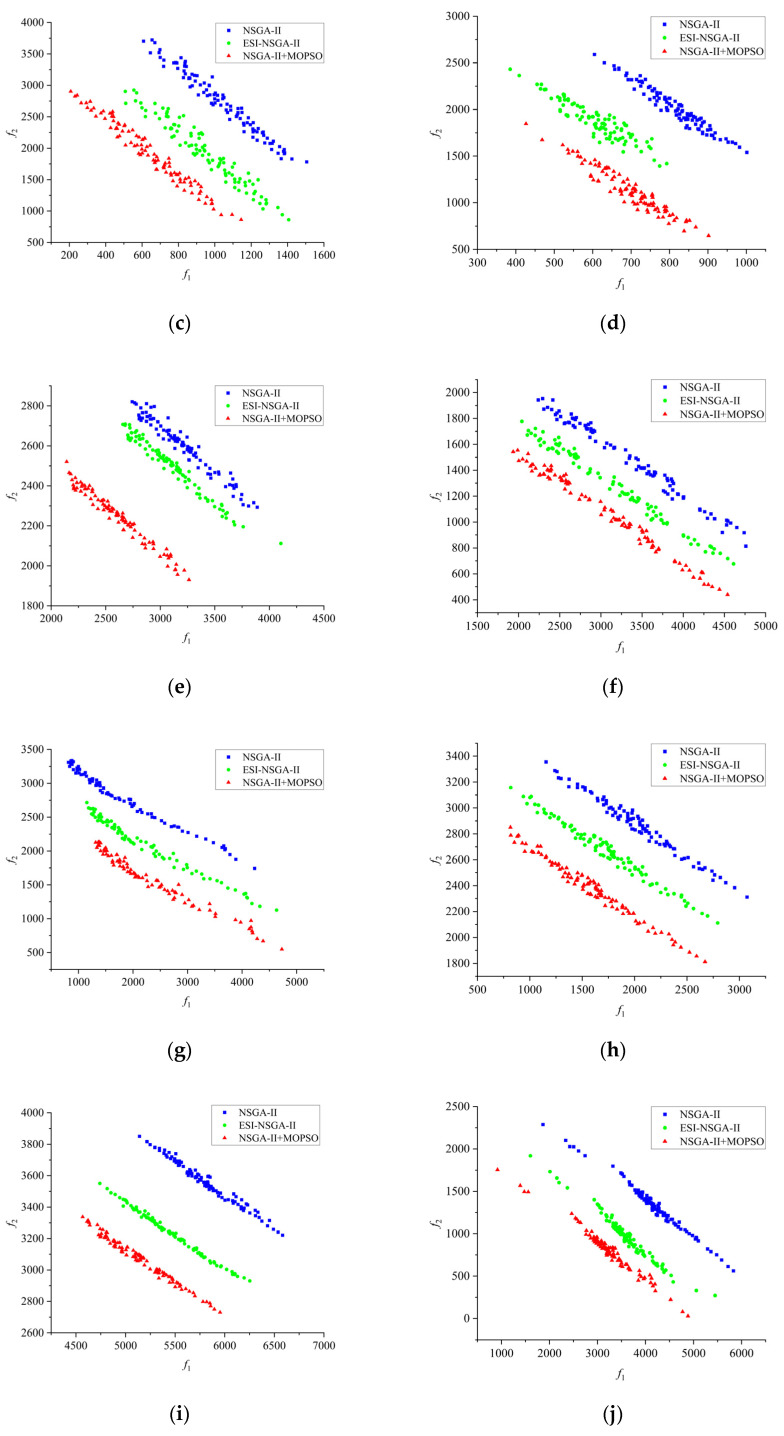 Figure 7
Figure 7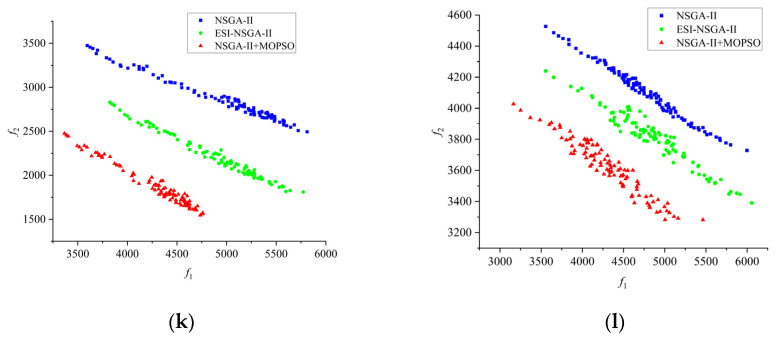 Figure 8
Figure 8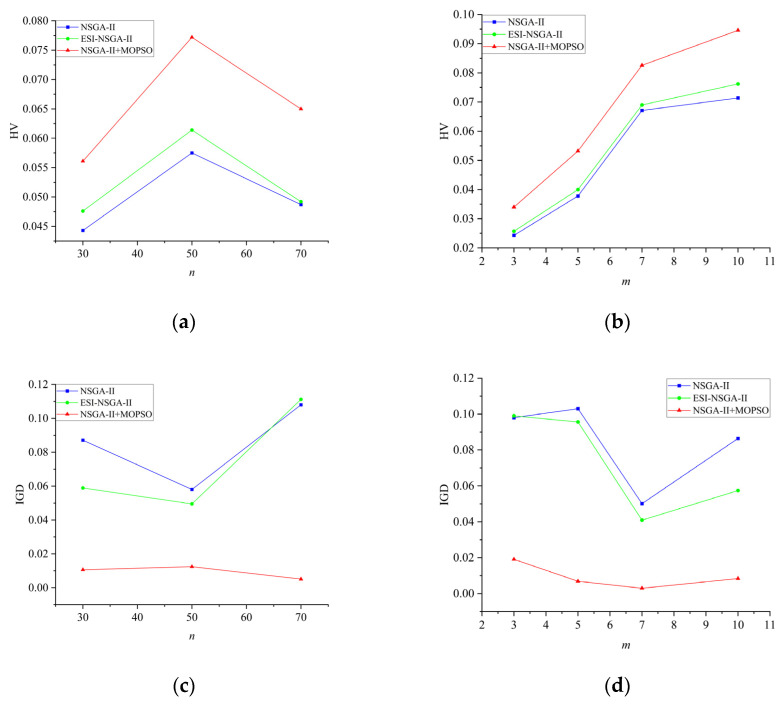 Figure 9
Figure 9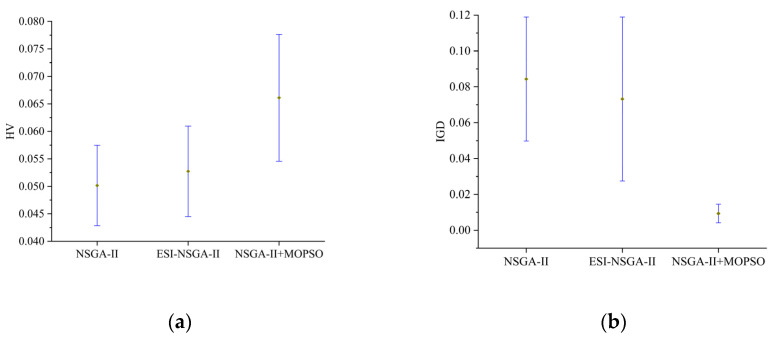 Figure 10
Figure 10Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsAssembly Line Balancing Optimization · Advanced Manufacturing and Logistics Optimization · BIM and Construction Integration