An Electro-Magnetic Log (EML) Integrated Navigation Algorithm Based on Hidden Markov Model (HMM) and Cross-Noise Linear Kalman Filter
Haosu Zhang, Liang Yang, Lei Zhang, Yong Du, Chaoqi Chen, Wei Mu, Lingji Xu

TL;DR
This paper introduces a new navigation algorithm for underwater vehicles that combines electro-magnetic log data with advanced filtering techniques to improve accuracy and reliability.
Contribution
The novel algorithm integrates HMM and CNLKF for EML-based navigation, offering high accuracy and robustness in complex underwater environments.
Findings
The proposed algorithm achieved an endpoint positioning error of 20.5 m compared to 712.1 m with traditional methods.
The algorithm effectively estimates water current speed and filters out EML and GNSS outliers.
EML is shown to be more concealable, cost-effective, and energy-efficient than traditional DVL.
Abstract
In this paper, an EML (electro-magnetic log) integrated navigation algorithm based on the HMM (hidden Markov model) and CNLKF (cross-noise linear Kalman filter) is proposed, which is suitable for SINS (strapdown inertial navigation system)/EML/GNSS (global navigation satellite system) integrated navigation systems for small or medium-sized AUV (autonomous underwater vehicle). The algorithm employs the following five techniques: ① the HMM-based pre-processing algorithm of EML data; ② the CNLKF-based fusion algorithm of SINS/EML information; ③ the MALKF (modified adaptive linear Kalman filter)-based algorithm of GNSS-based calibration; ④ the estimation algorithm of the current speed based on output from MALKF and GNSS; ⑤ the feedback correction of LKF (linear Kalman filter). The principle analysis of the algorithm, the modeling process, and the flow chart of the algorithm are given in…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
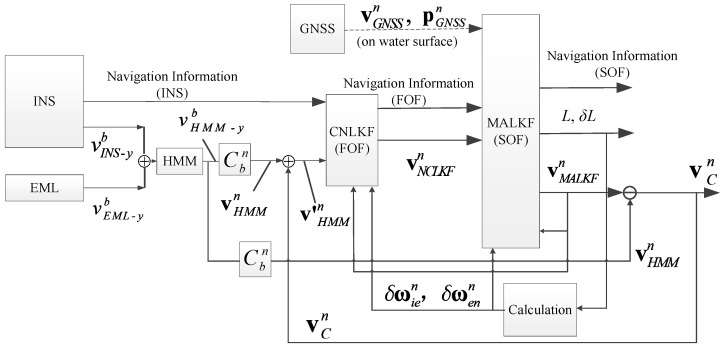 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3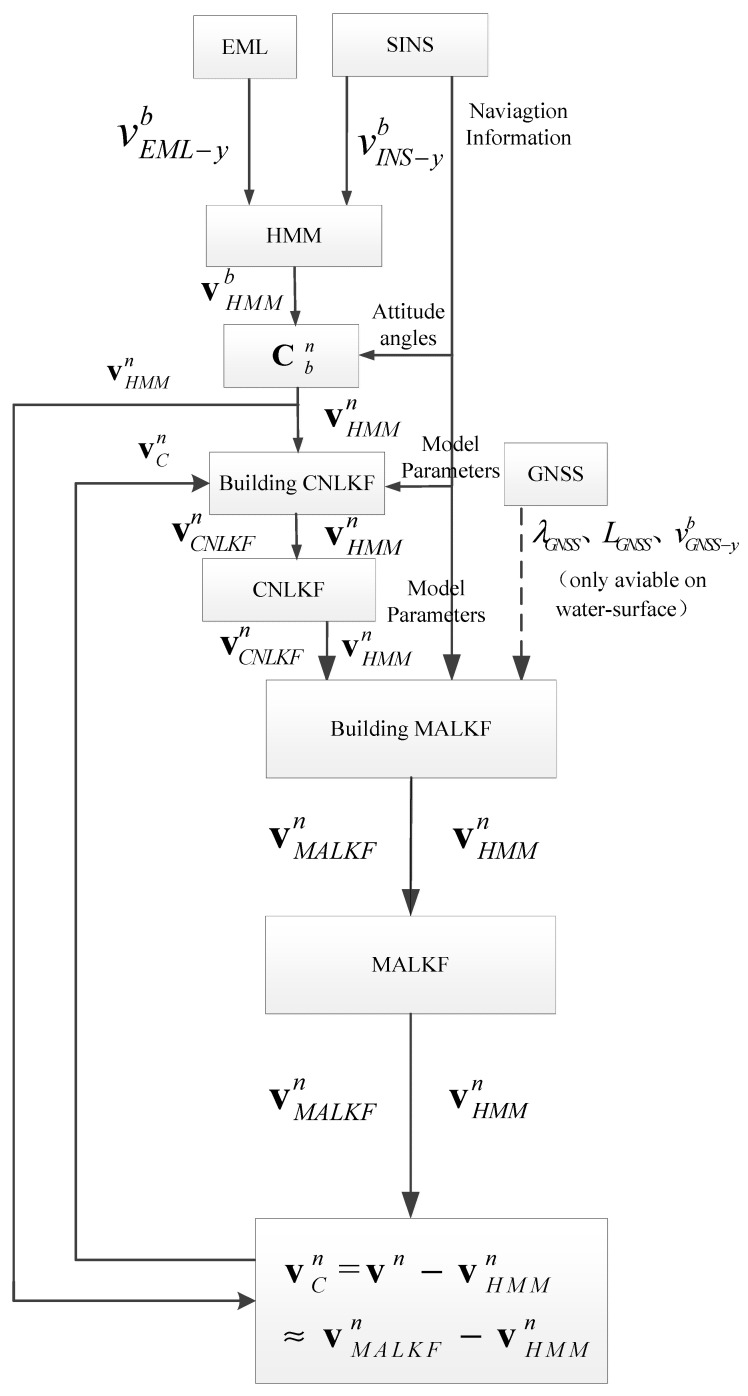 Figure 4
Figure 4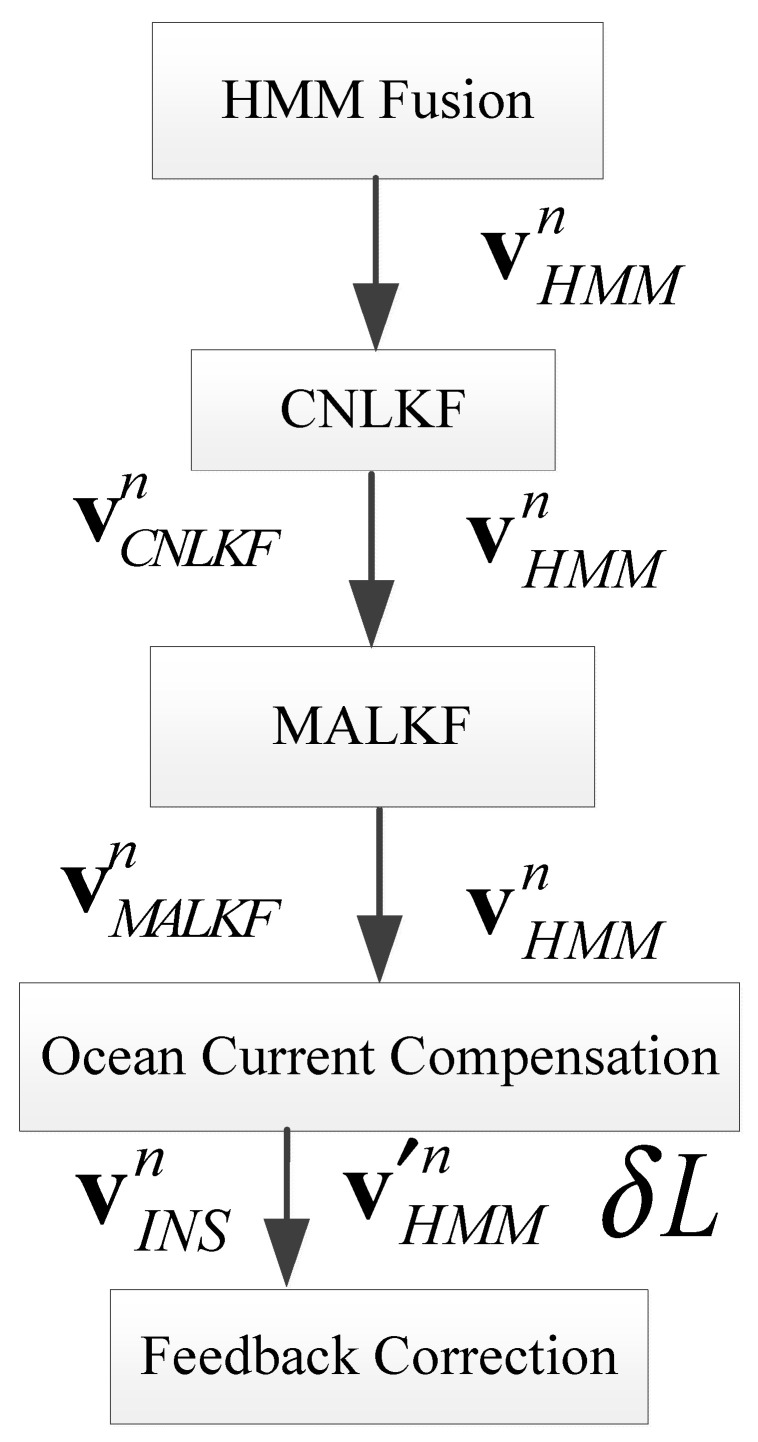 Figure 5
Figure 5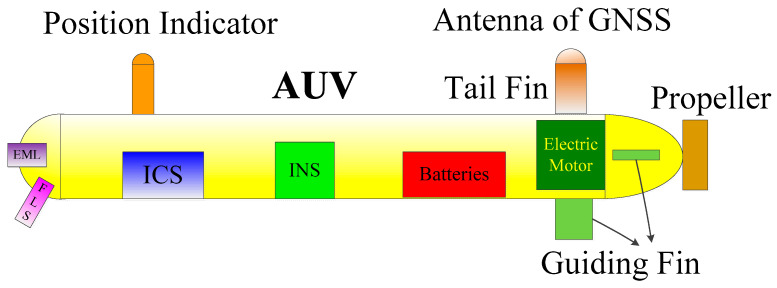 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10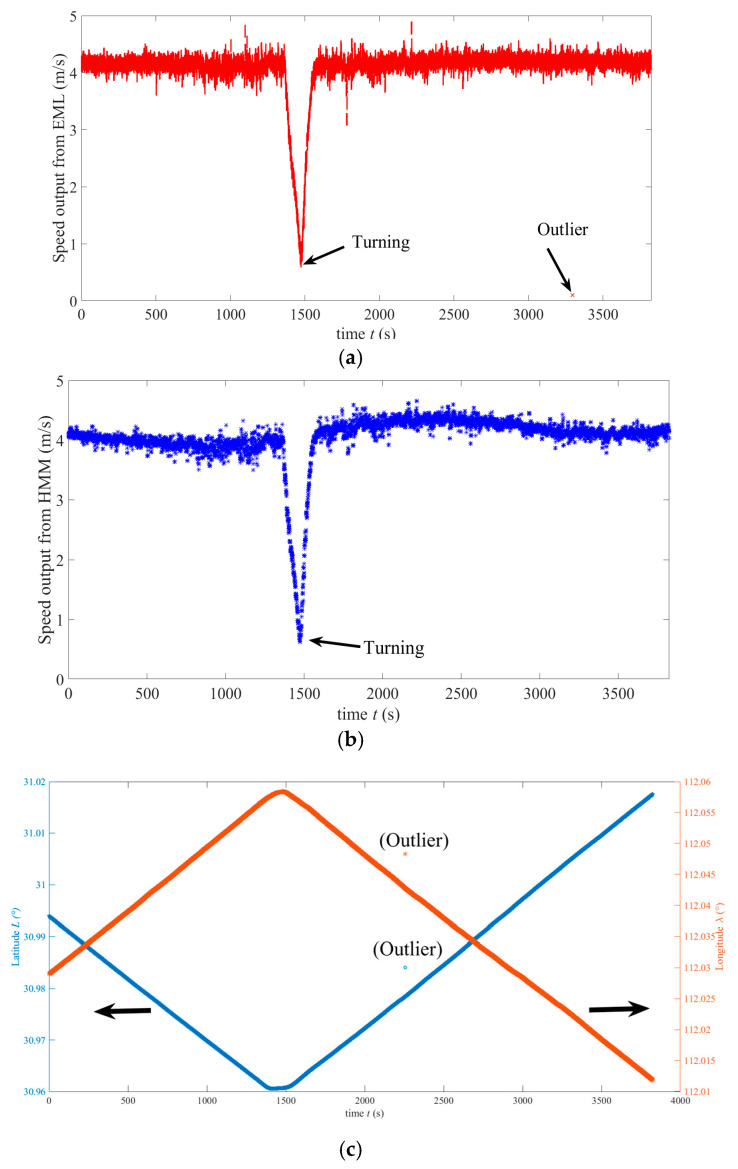 Figure 11
Figure 11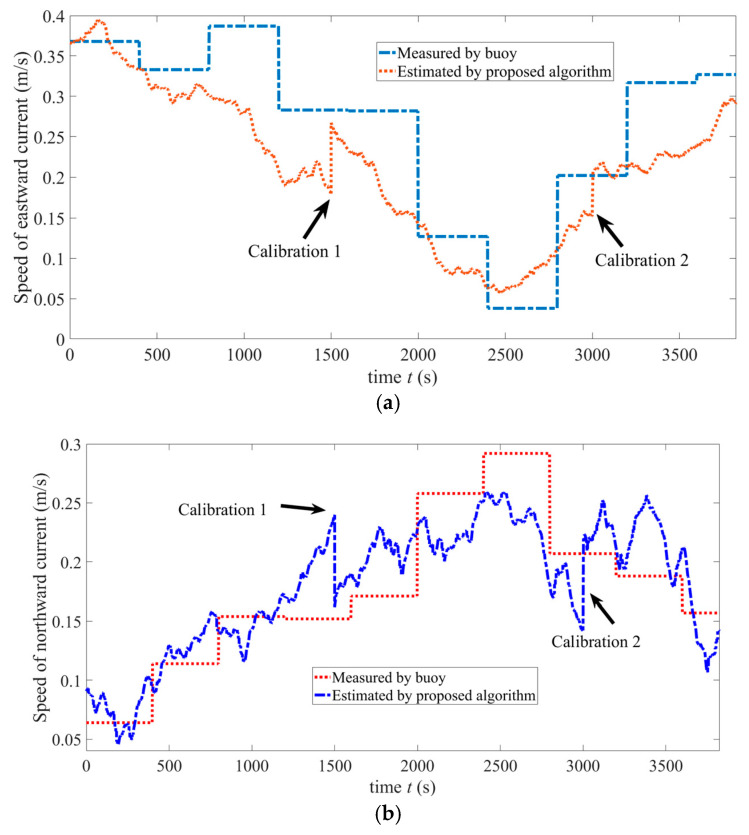 Figure 12
Figure 12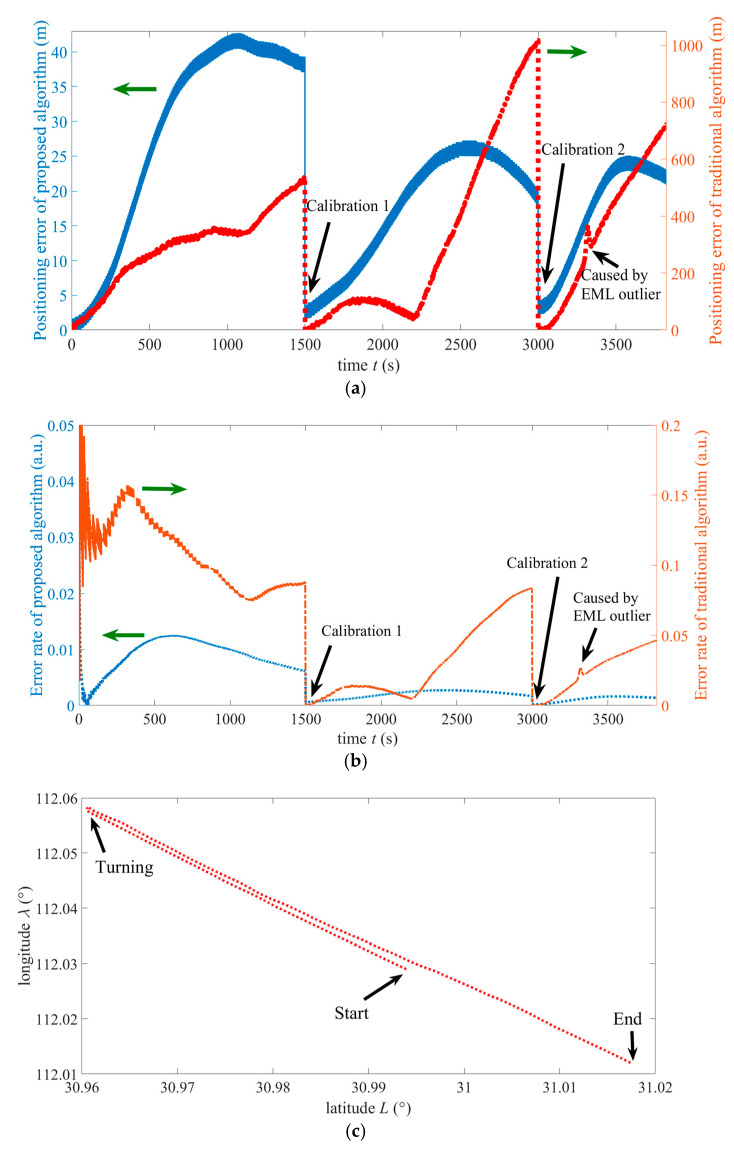 Figure 13
Figure 13 Figure 14
Figure 14 Figure 15
Figure 15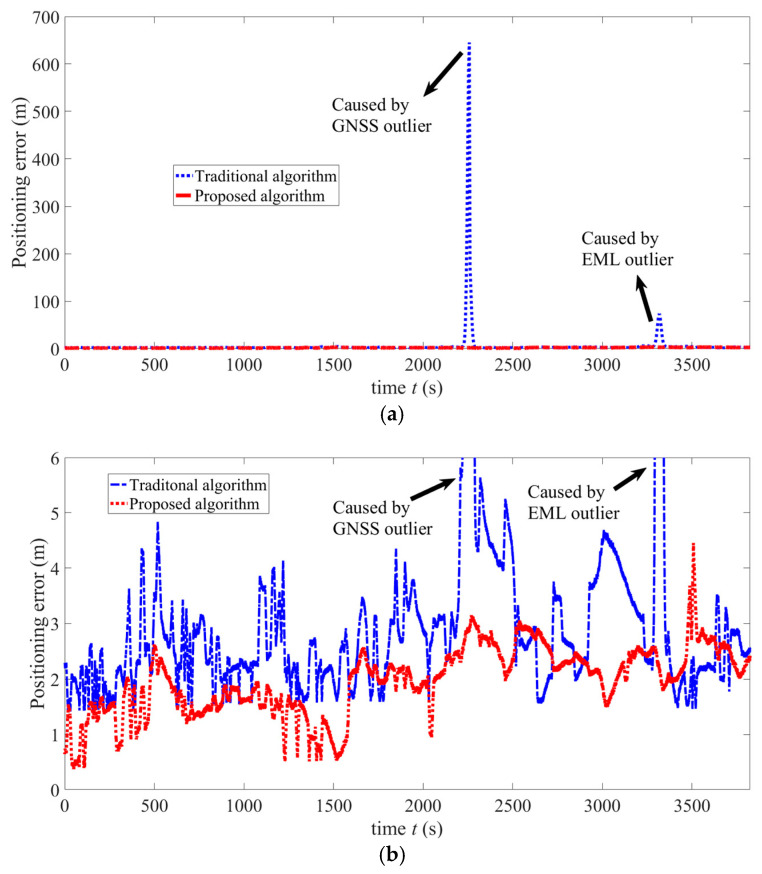 Figure 16
Figure 16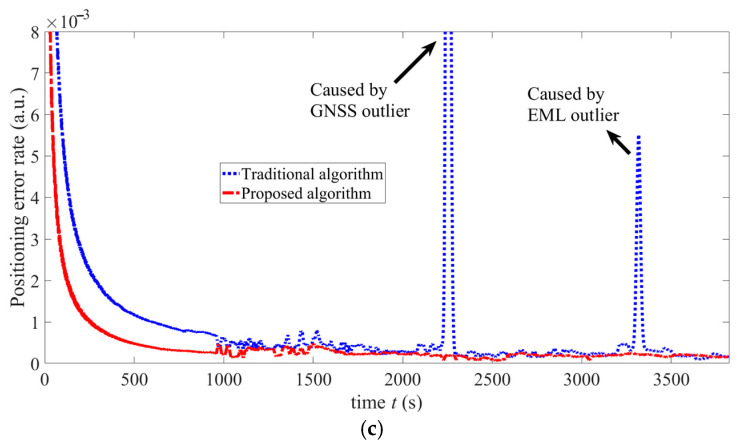 Figure 17
Figure 17Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsUnderwater Vehicles and Communication Systems · Target Tracking and Data Fusion in Sensor Networks · Maritime Navigation and Safety