A conceptual approach to material detection based on damping vibration-force signals via robot
Ahmad Saleh Asheghabadi, Mohammad Keymanesh, Saeed Bahrami Moqadam, Jing Xu

TL;DR
This paper introduces a new method for detecting object materials using robot-based vibration and damping signals, achieving high accuracy.
Contribution
A novel impact-based material detection approach using damping vibration-force signals and machine learning in a robotic setup.
Findings
The method achieved 95.46% accuracy in detecting materials of ten different objects.
Using damping and vibration features improved classification accuracy over traditional tactile methods.
The system is suitable for industrial robot applications due to its robustness and performance.
Abstract
Object perception, particularly material detection, is predominantly performed through texture recognition, which presents significant limitations. These methods are insufficient to distinguish between different materials with similar surface roughness, and noise caused by tactile movements affects the system performance. This paper presents a straightforward, impact-based approach to identifying materials, utilizing the cantilever beam mechanism in the UR5e robot's artificial finger. To detect object material, an elastic metal sheet was fixed to a load cell with an accelerometer and a metal appendage positioned above and below its free end, respectively. After recording the damping force signal and vibration data from the load cell and accelerometer caused by the metal appendage's impact, features such as vibration amplitude, damping time, wavelength, and force amplitude were…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
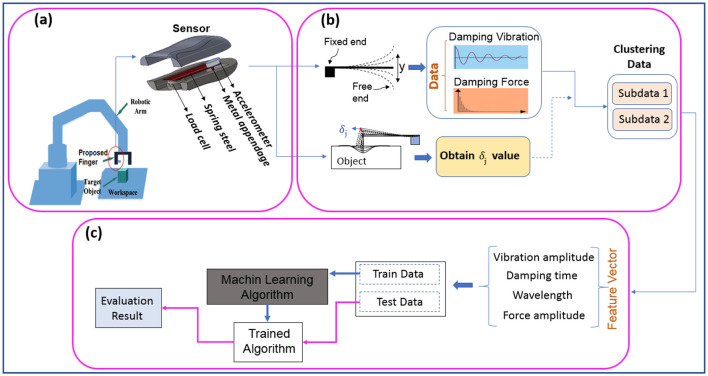 Figure 1
Figure 1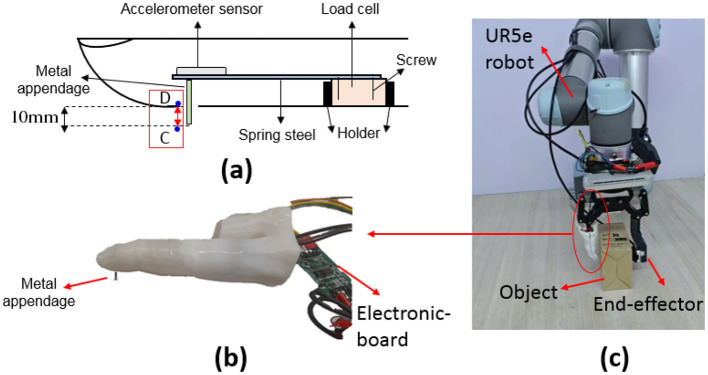 Figure 2
Figure 2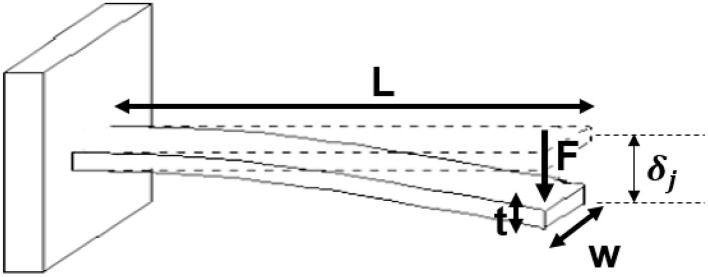 Figure 3
Figure 3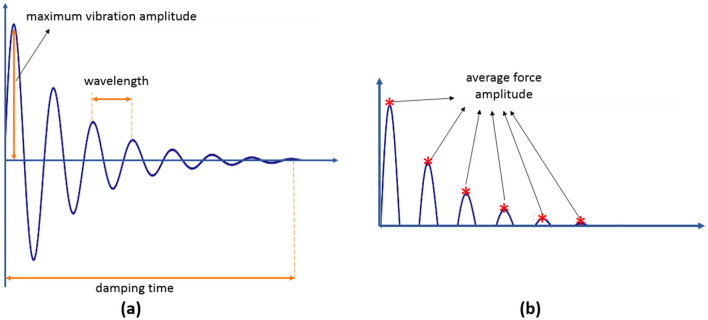 Figure 4
Figure 4 Figure 5
Figure 5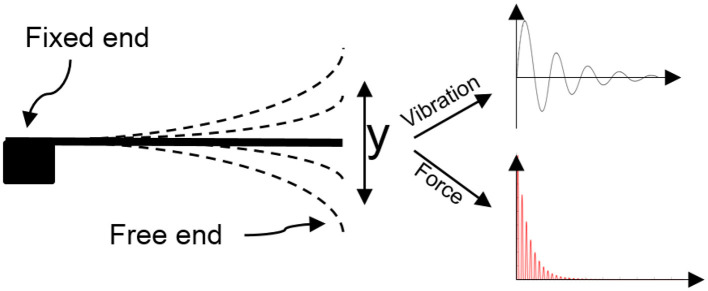 Figure 6
Figure 6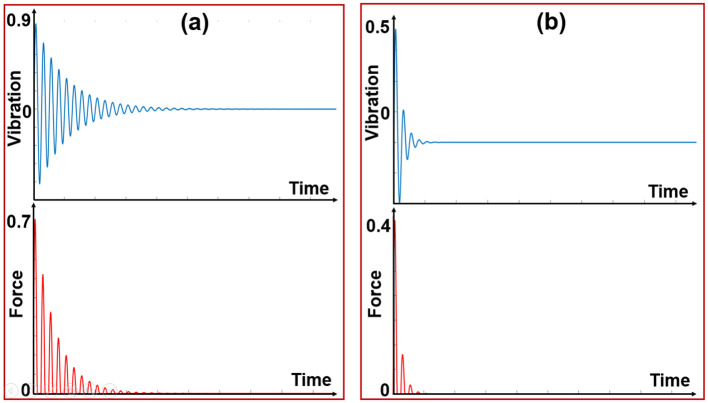 Figure 7
Figure 7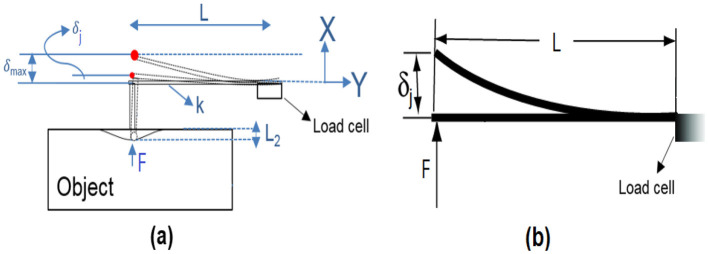 Figure 8
Figure 8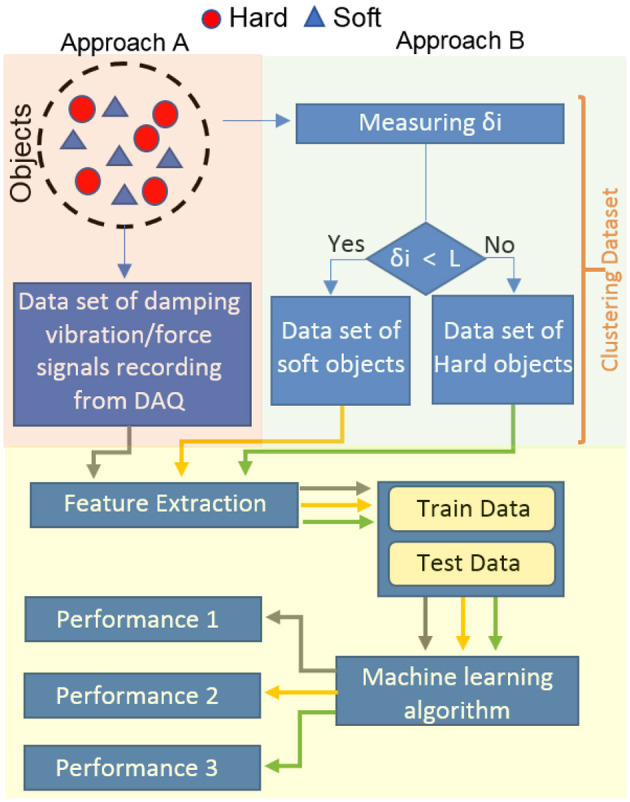 Figure 9
Figure 9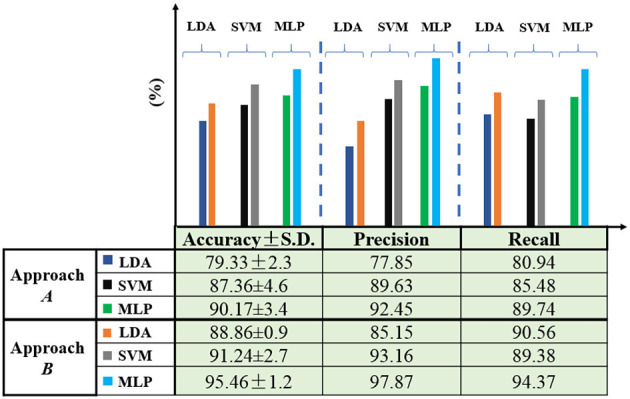 Figure 10
Figure 10Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobot Manipulation and Learning · Industrial Vision Systems and Defect Detection · Advanced Sensor and Energy Harvesting Materials