Lightweight CNN-Based Visual Perception Method for Assessing Local Environment Complexity of Unmanned Surface Vehicle
Tulin Li, Xiufeng Zhang, Yingbo Huang, Chunxi Yang

TL;DR
This paper introduces a lightweight CNN method to help unmanned surface vehicles better detect and navigate complex environments.
Contribution
A lightweight CNN with heading angle integration improves environment complexity assessment for USVs.
Findings
The model achieves 80% smaller size while maintaining over 90% accuracy.
The method improves heuristic algorithm optimization and path planning performance by about 21%.
Abstract
Addressing the problem of inadequate environmental detection in the process of optimizing search for unmanned surface vehicles (USVs) by a heuristic algorithm, this paper proposes a comprehensive visual perception method that combines a lightweight convolutional neural network (CNN) with the USV’s real-time heading angle. This method employs a multi-feature input CNN with residual learning blocks, which takes both the current local environmental images and heading angle features as inputs to identify the complexity of the local environment with higher accuracy and a smaller load size. Meanwhile, human expertise is incorporated to classify labels through a majority voting system, thereby making the model’s perceptual classification more intuitive and allowing it to possess a human-like comprehensive perception ability compared to systems with classification methods with several…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1 Figure 2
Figure 2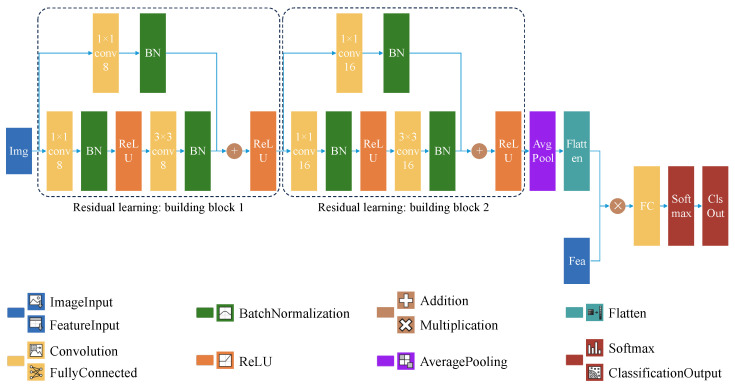 Figure 3
Figure 3 Figure 4
Figure 4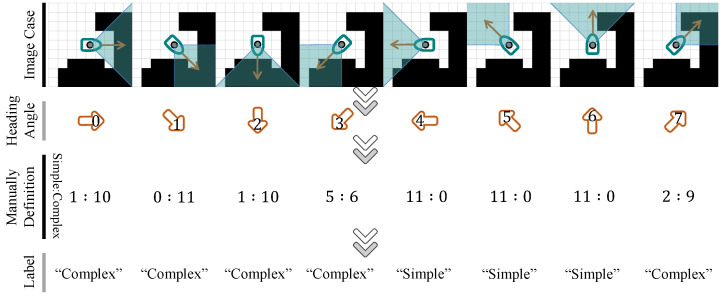 Figure 5
Figure 5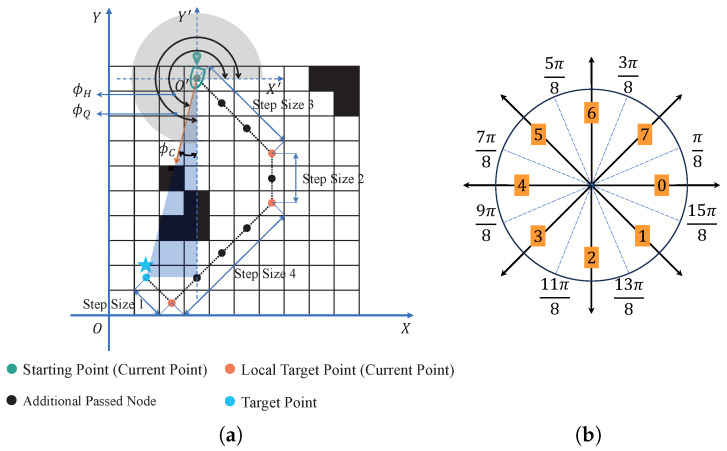 Figure 6
Figure 6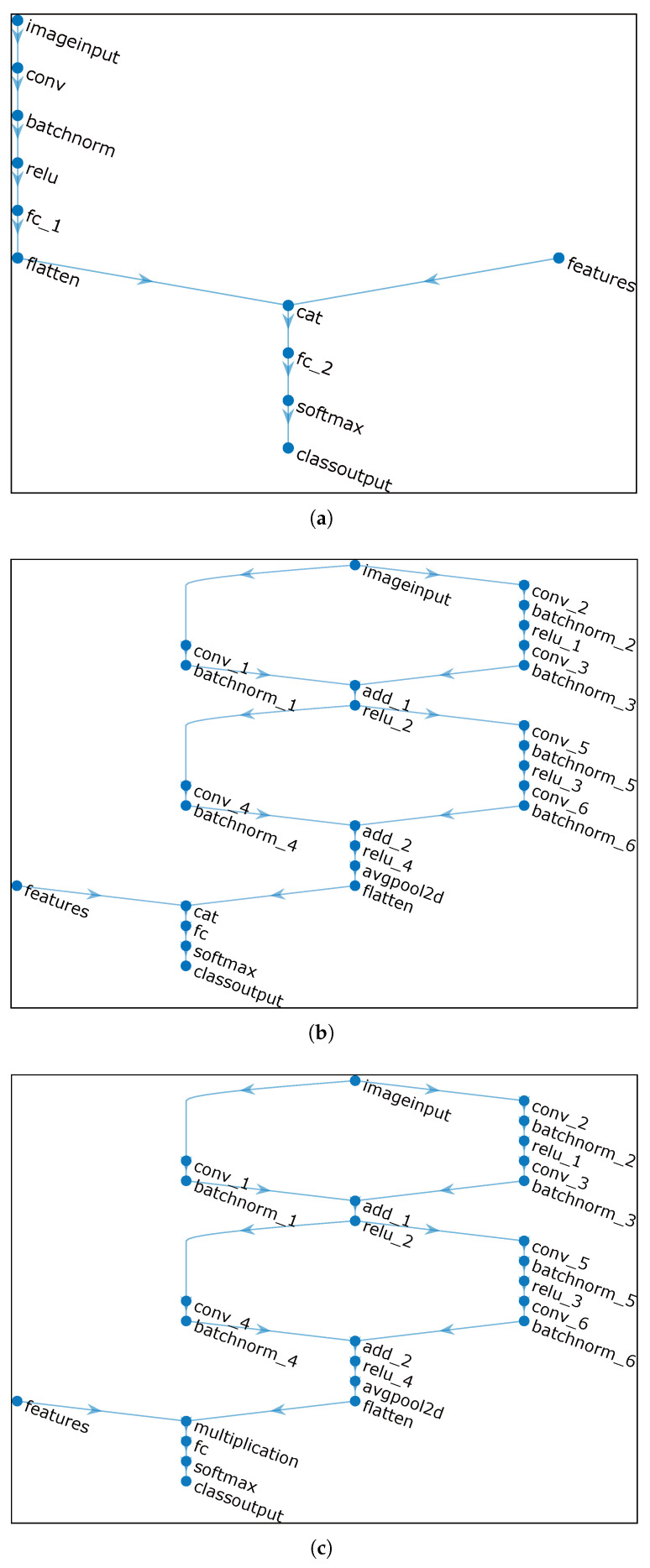 Figure 7
Figure 7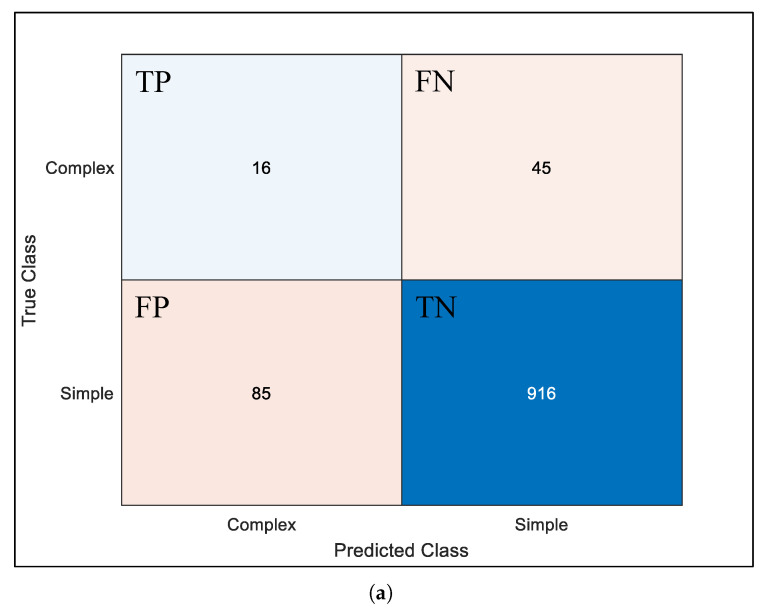 Figure 8
Figure 8 Figure 9
Figure 9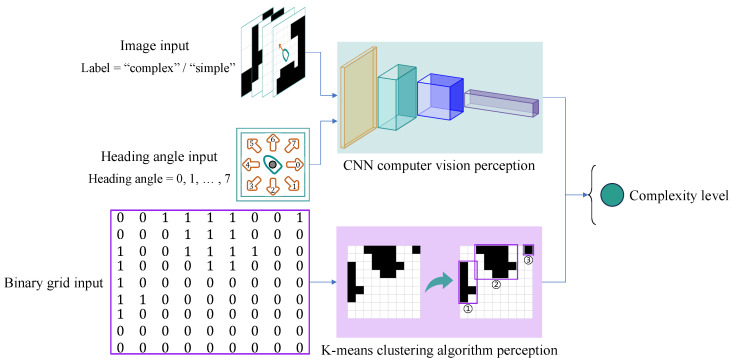 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsMaritime Navigation and Safety