Adaptive robust position control scheme for an electromagnetic levitation system with experimental verification
Ziwei Wu, Kuangang Fan, Ping Yi

TL;DR
This paper proposes a new control method for electromagnetic levitation systems that improves stability and performance under disturbances.
Contribution
A novel IWOA-SMC-ALADRC control scheme is introduced, combining optimization and robust control for better performance.
Findings
The proposed control method shows improved anti-disturbance performance compared to existing methods.
Simulation and experimental results confirm the effectiveness of IWOA-SMC-ALADRC in tracking and stability.
The adaptive parameter tuning strategy enhances the controller's robustness.
Abstract
Electromagnetic levitation technology has several advantages, such as no friction, safety, and reliability. Electromagnetic levitation control, as the core of electromagnetic levitation technology, has attracted people’s attention. The use of other traditional control algorithms frequently results in a decline in the system’s anti-disturbance and tracking performance due to the highly nonlinear, stochastic uncertainty, and time delay characteristics of electromagnetic levitation systems. This work takes the single point electromagnetic levitation ball system as the research object to address the above-mentioned issues. A control method combining an improved whale optimization algorithm with robust sliding mode control and adaptive linear active disturbance rejection (IWOA-SMC-ALADRC) is proposed to achieve stable control of a single point electromagnetic levitation ball. Firstly, a…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
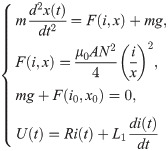 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13 Figure 14
Figure 14 Figure 15
Figure 15 Figure 16
Figure 16 Figure 17
Figure 17 Figure 18
Figure 18 Figure 19
Figure 19 Figure 20
Figure 20 Figure 21
Figure 21 Figure 22
Figure 22 Figure 23
Figure 23 Figure 24
Figure 24 Figure 25
Figure 25 Figure 26
Figure 26 Figure 27
Figure 27 Figure 28
Figure 28 Figure 29
Figure 29 Figure 30
Figure 30 Figure 31
Figure 31 Figure 32
Figure 32 Figure 33
Figure 33 Figure 34
Figure 34 Figure 35
Figure 35 Figure 36
Figure 36 Figure 37
Figure 37 Figure 38
Figure 38 Figure 39
Figure 39 Figure 40
Figure 40 Figure 41
Figure 41 Figure 42
Figure 42 Figure 43
Figure 43 Figure 44
Figure 44 Figure 45
Figure 45 Figure 46
Figure 46 Figure 47
Figure 47 Figure 48
Figure 48 Figure 49
Figure 49 Figure 50
Figure 50Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsMagnetic Bearings and Levitation Dynamics · Magnetic and Electromagnetic Effects · Wireless Power Transfer Systems