Comparisons of Inverse Dynamics Formulations in a Spatial Redundantly Actuated Parallel Mechanism Constrained by Two Point Contact Higher Kinematic Pairs
Chen Cheng, Xiaojing Yuan, Yenan Li, Jian Liu

TL;DR
This paper compares different methods for calculating the inverse dynamics of a complex mechanical system inspired by human jaw movement.
Contribution
The study introduces a novel spatial redundantly actuated parallel mechanism constrained by two point contact higher kinematic pairs and compares inverse dynamics formulations.
Findings
The Newton–Euler model reflects constraint forces with six equations and eight unknowns.
The Lagrangian and virtual work models produce four equations and six unknowns without constraint forces.
The non-redundantly actuated model reduces computational cost to 16.7% and 36.63% of the first two methods.
Abstract
A spatial redundantly actuated parallel mechanism (RAPM) constrained by two point contact higher kinematic pairs (HKPs) has been designed, arising from the inspiration of mastication in human beings: the end effector is the lower jaw, the six kinematic chains are the primary chewing muscles, and the constraints at HKPs are the temporomandibular joints. In this paper, firstly, the constrained motions of the mechanism are described in detail; thereafter, five models are formulated by the well-known Newton–Euler’s law, the Lagrangian equations, and the principle of virtual work, to explore its rigid-body inverse dynamics. The symbolic results show that the model structures based on these approaches are quite different: the model via the Newton–Euler law well reflects the nature of the mechanism in terms of the constraint forces from HKPs with six equations and eight unknowns, and the…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
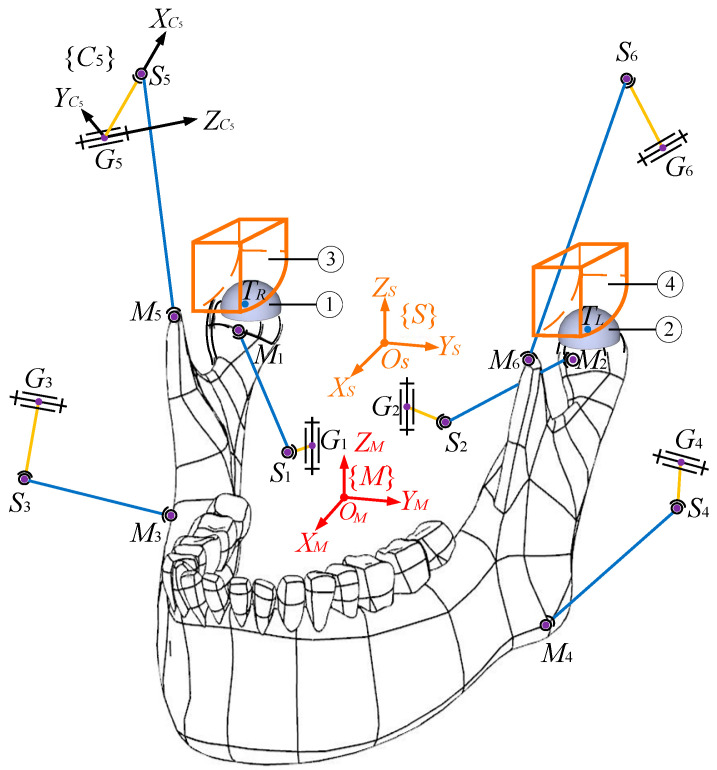 Figure 1
Figure 1 Figure 2
Figure 2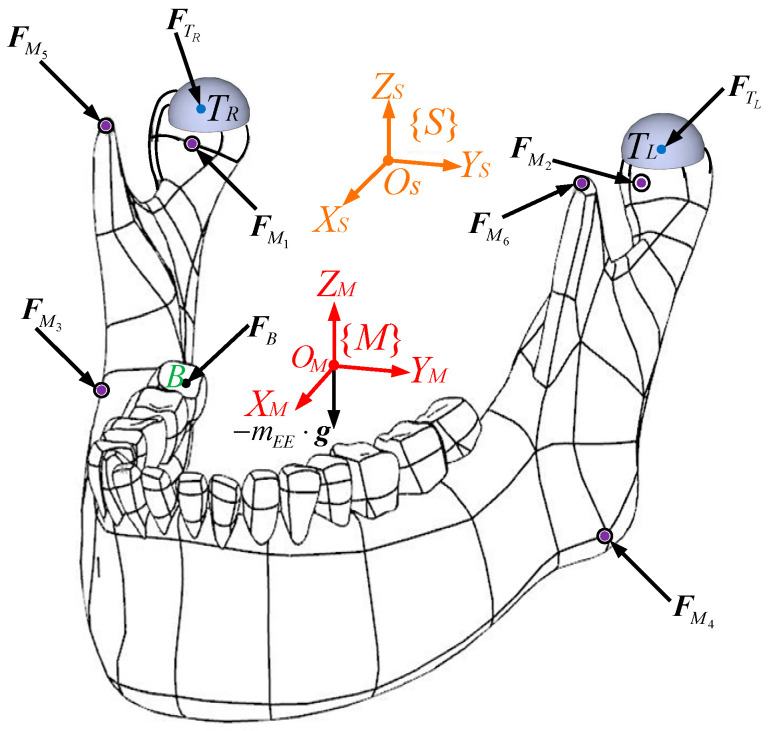 Figure 3
Figure 3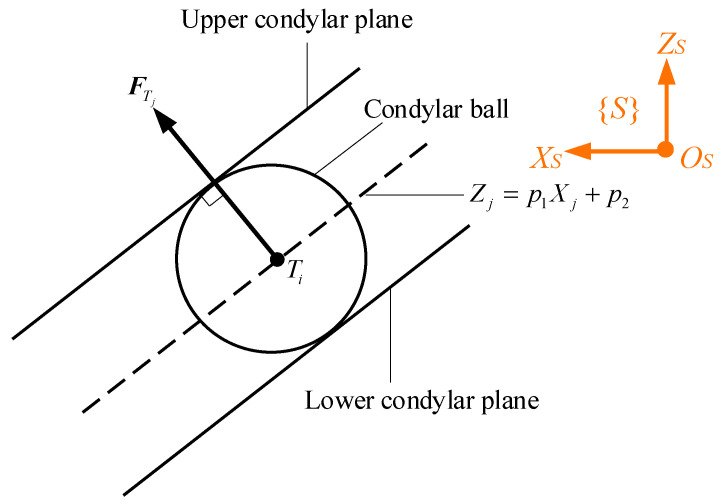 Figure 4
Figure 4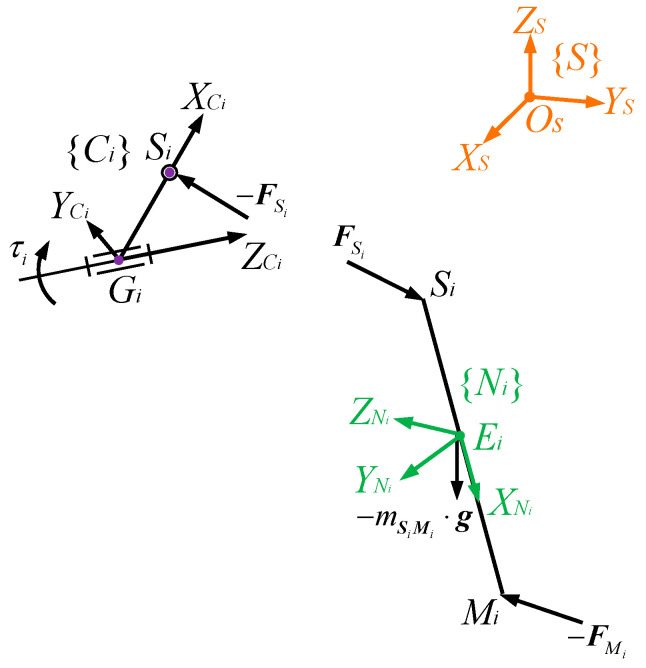 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsOccupational Therapy Practice and Research · Cerebral Palsy and Movement Disorders · Family and Disability Support Research