Generalization Enhancement of Visual Reinforcement Learning through Internal States
Hanlin Yang, William Zhu, Xianchao Zhu

TL;DR
This paper introduces a new method to improve generalization in visual reinforcement learning by using internal states to guide learning in complex environments.
Contribution
The novel Internal States Simulation Auxiliary (ISSA) method uses a teacher-student framework to enhance generalization in visual reinforcement learning.
Findings
The ISSA method significantly improves generalization in unseen environments.
The method outperforms existing approaches in complex continuous control tasks.
The student agent learns more effective visual representations with teacher guidance.
Abstract
Visual reinforcement learning is important in various practical applications, such as video games, robotic manipulation, and autonomous navigation. However, a major challenge in visual reinforcement learning is the generalization to unseen environments, that is, how agents manage environments with previously unseen backgrounds. This issue is triggered mainly by the high unpredictability inherent in high-dimensional observation space. To deal with this problem, techniques including domain randomization and data augmentation have been explored; nevertheless, these methods still cannot attain a satisfactory result. This paper proposes a new method named Internal States Simulation Auxiliary (ISSA), which uses internal states to improve generalization in visual reinforcement learning tasks. Our method contains two agents, a teacher agent and a student agent: the teacher agent has the ability…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
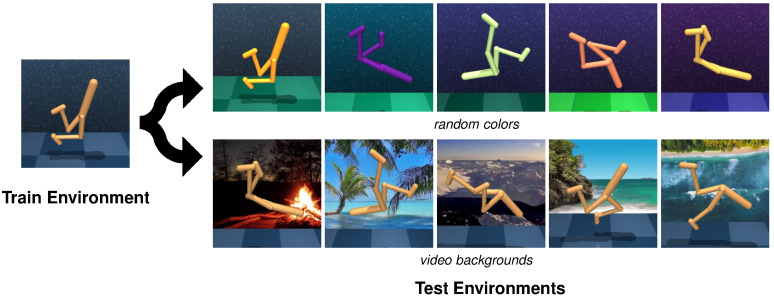 Figure 1
Figure 1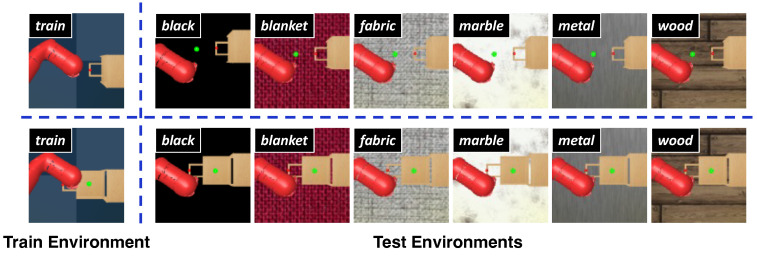 Figure 2
Figure 2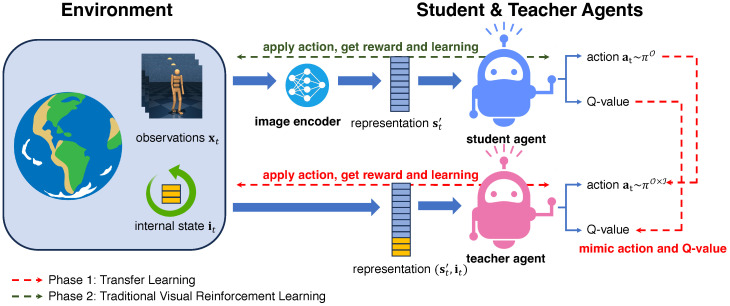 Figure 3
Figure 3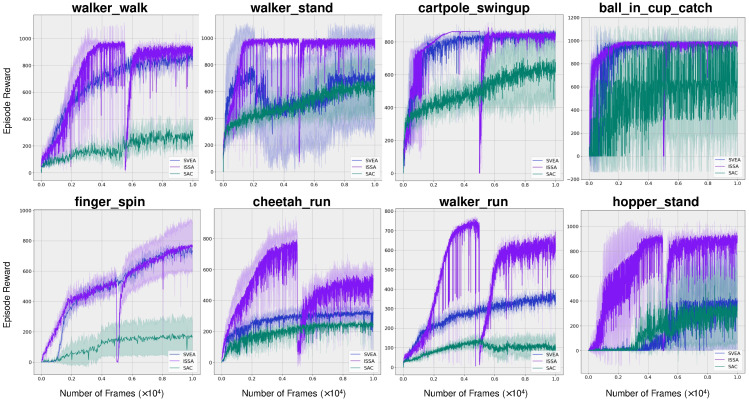 Figure 4
Figure 4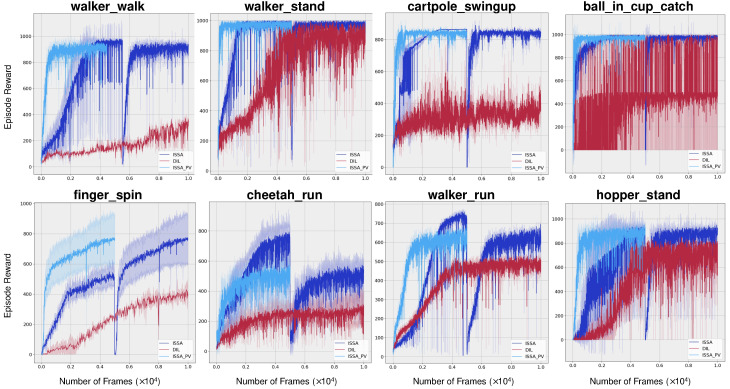 Figure 5
Figure 5Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsReinforcement Learning in Robotics · Domain Adaptation and Few-Shot Learning · Advanced Vision and Imaging