An Adaptive Cooperative Localization Method for Heterogeneous Air-to-Ground Robots Based on Relative Distance Constraints in a Satellite-Denial Environment
Shidong Han, Zhi Xiong, Chenfa Shi

TL;DR
This paper introduces an adaptive method for air-to-ground robot localization that works even when satellite signals are unavailable.
Contribution
A novel adaptive cooperative localization method using relative distance constraints for heterogeneous robots in satellite-denied environments.
Findings
The method adapts to varying numbers of known-position UAVs in the network.
It achieves high-precision localization for UGVs using optimal spatial configurations and historical constraints.
Experimental results confirm the method's effectiveness in dynamic scenarios.
Abstract
Cooperative localization (CL) for air-to-ground robots in a satellite-denial environment has become a current research hotspot. The traditional distance-based heterogeneous multiple-robot CL method requires at least four unmanned aerial vehicles (UAVs) with known positions. When the number of known-position UAVs in a cluster collaborative network is insufficient, the traditional distance-based CL method has a certain inapplicability. A novel adaptive CL method for air-to-ground robots based on relative distance constraints is proposed in this paper. Based on a dynamically changing number of known-position UAVs in the cluster collaborative network, the adaptive fusion estimation threshold is set. When the number of known-position UAVs in the cluster cooperative network is large, the real-time dynamic topology characteristics of multiple robots’ spatial geometric configurations are…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
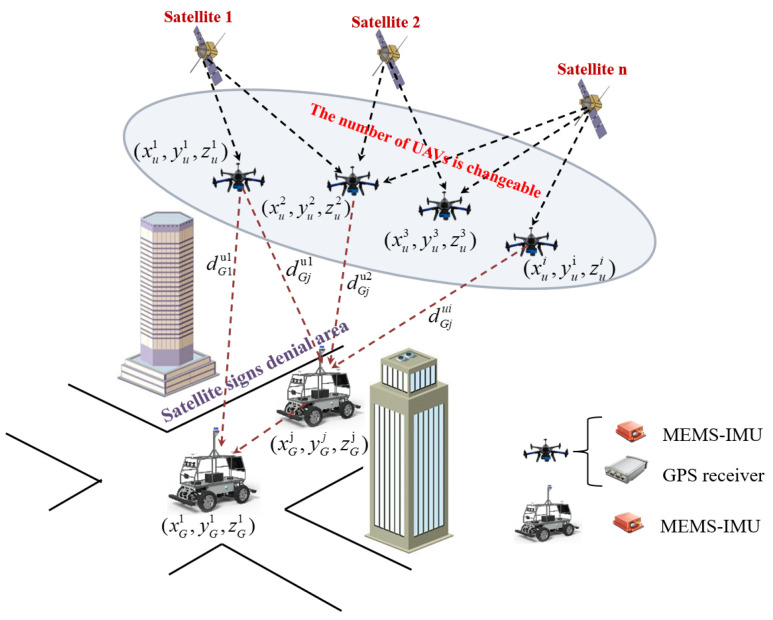 Figure 1
Figure 1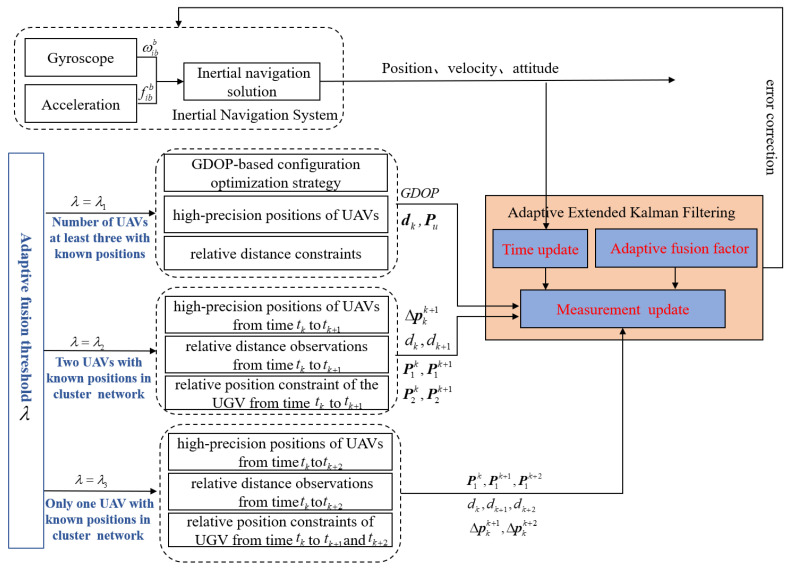 Figure 2
Figure 2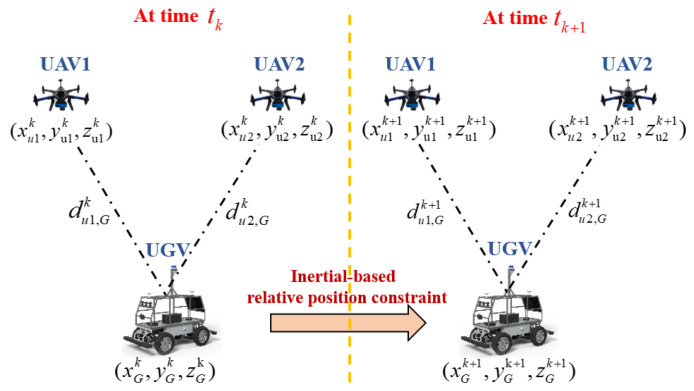 Figure 3
Figure 3 Figure 4
Figure 4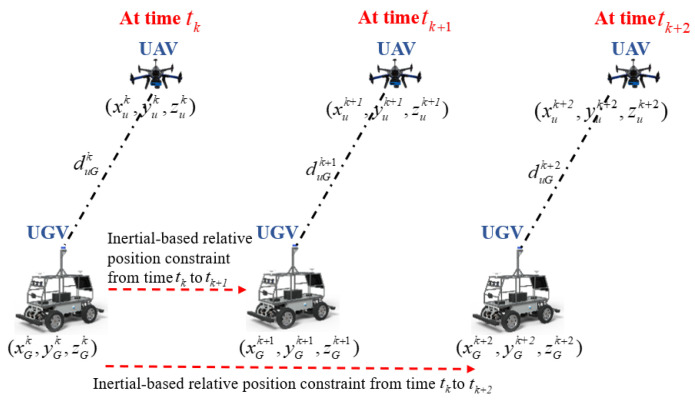 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12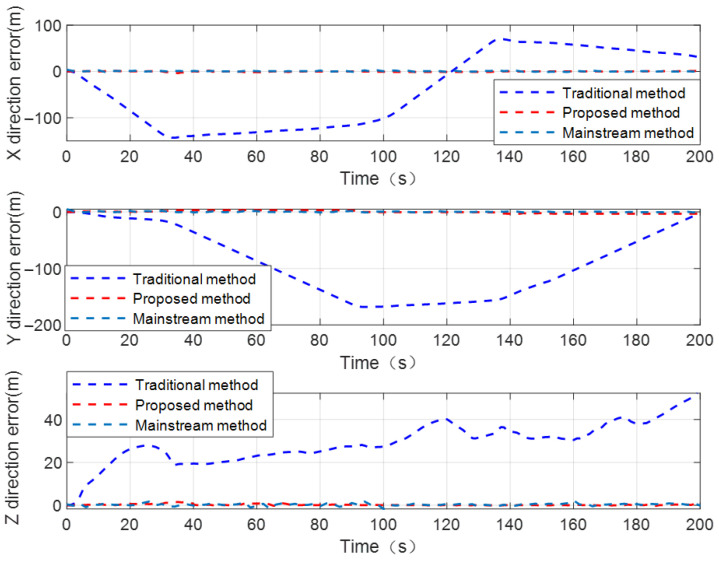 Figure 13
Figure 13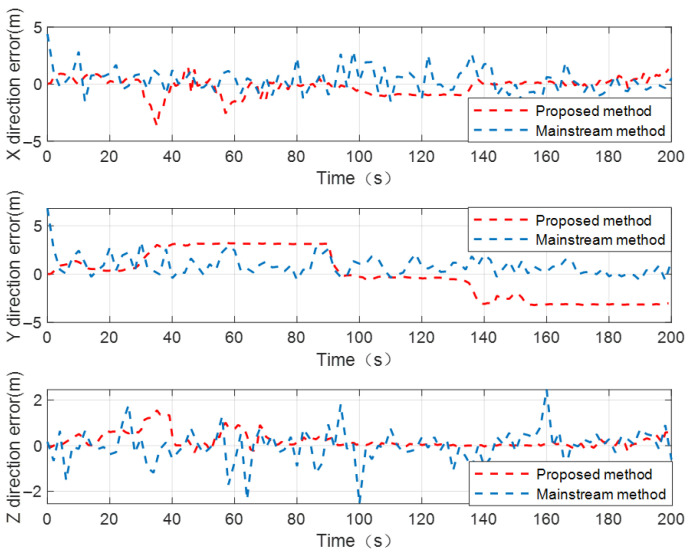 Figure 14
Figure 14Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotics and Sensor-Based Localization · Indoor and Outdoor Localization Technologies · UAV Applications and Optimization