Research on path planning for clear aligner flexible manufacturing
Kuntao Huang, Sheng Gao, Cheng Zou, Cong Zhang, Yili Peng, Xi Liu

TL;DR
This paper introduces a new path planning method for manufacturing clear aligners using PCA-ICP registration and robot machining to improve automation and precision.
Contribution
A novel PCA-ICP registration algorithm is proposed to enhance coordinate alignment and robot path planning for clear aligner manufacturing.
Findings
The PCA-ICP registration algorithm achieves a maximum distance error of 0.03 mm.
The method enables precise robot machining of clear aligners by generating accurate tool paths.
The proposed approach effectively overcomes limitations of traditional milling path planning.
Abstract
In recent years, clear aligner can enhance individual appearance with dental defects, so it used more and more widely. However, in manufacturing process, there are still some problems, such as low degree of automation and high equipment cost. The problem of coordinate system mismatch between gingival curve point cloud and dental CAD model is faced to. The PCA-ICP registration algorithm is proposed, which includes coarse match algorithm and improve-ICP registration algorithm. The principal component analysis (PCA) based method can roughly find the posture relationship between the two point clouds. Using z-level dynamic hierarchical, the ICP registration can accurately find the posture between these two clouds. The final registration maximum distance error is 0.03 mm, which is smaller than robot machining error. Secondly, the clear aligner machining process is conducted to verify the…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
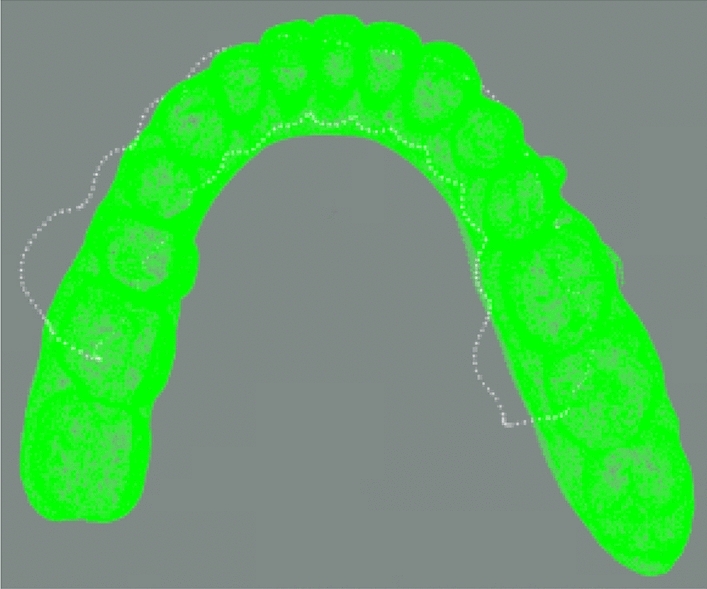 Figure 10
Figure 10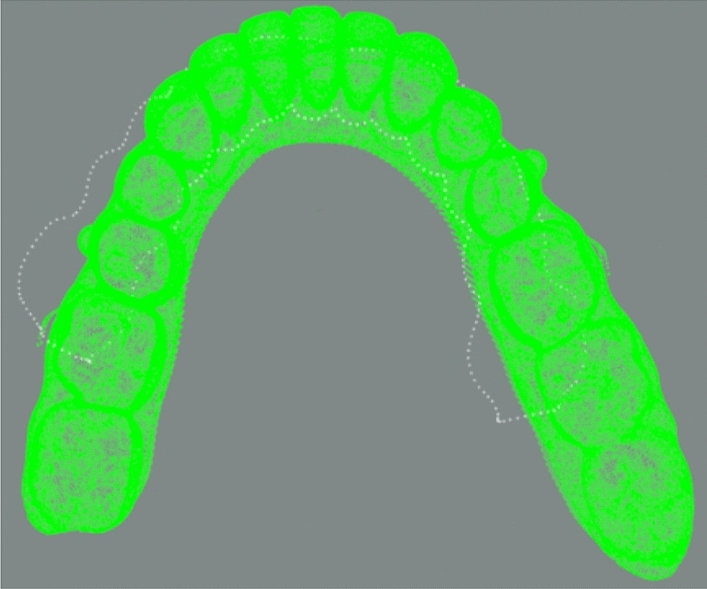 Figure 11
Figure 11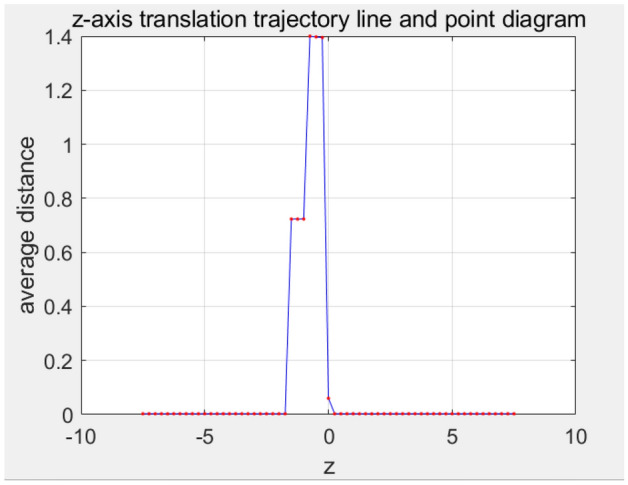 Figure 12
Figure 12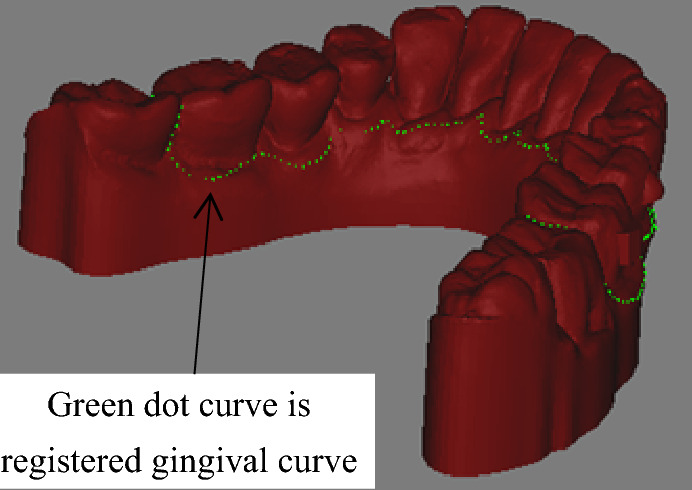 Figure 13
Figure 13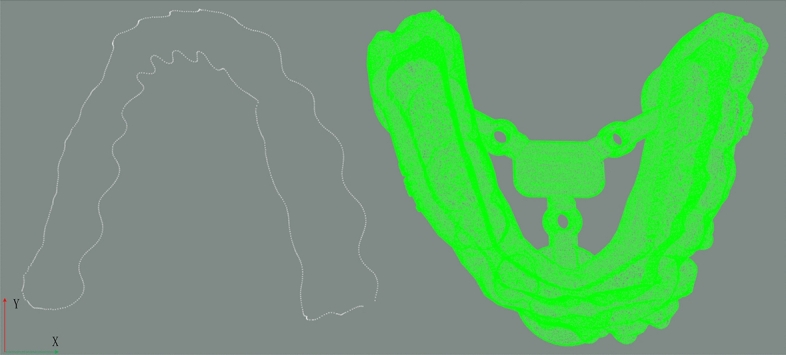 Figure 14
Figure 14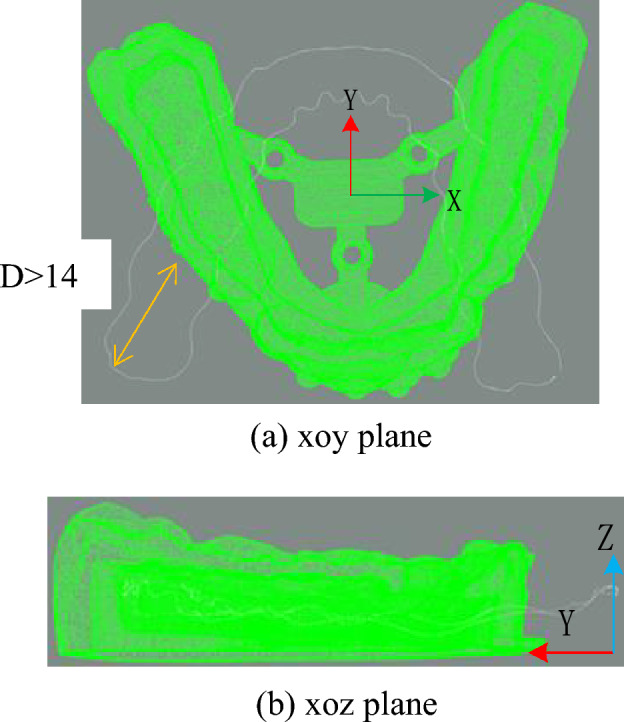 Figure 15
Figure 15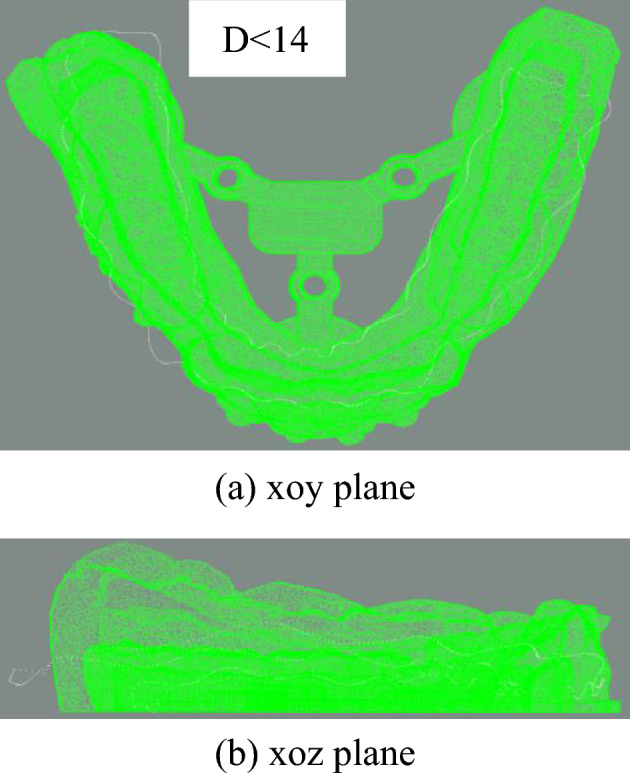 Figure 16
Figure 16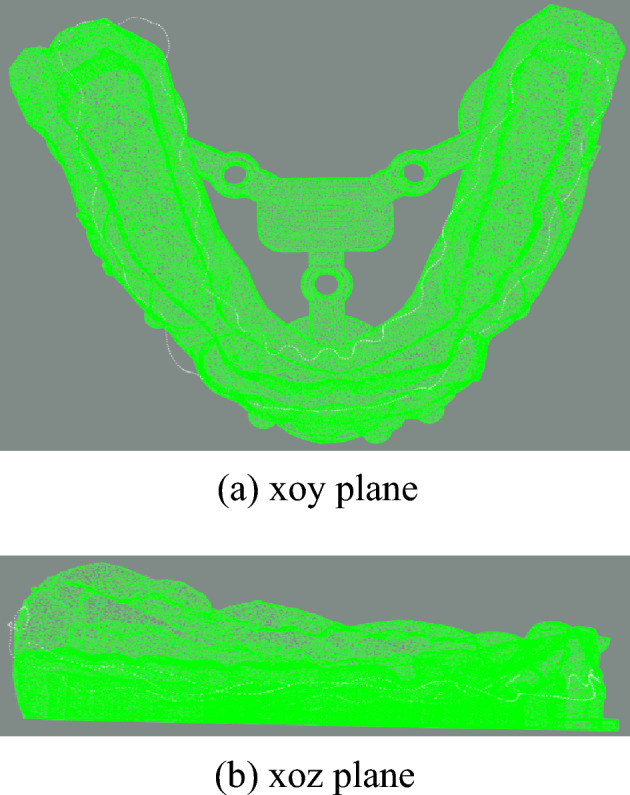 Figure 17
Figure 17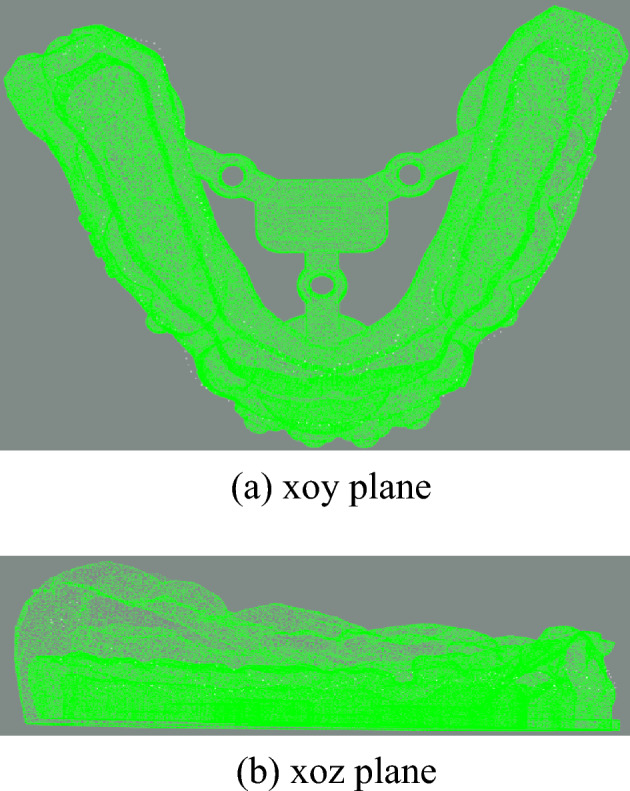 Figure 18
Figure 18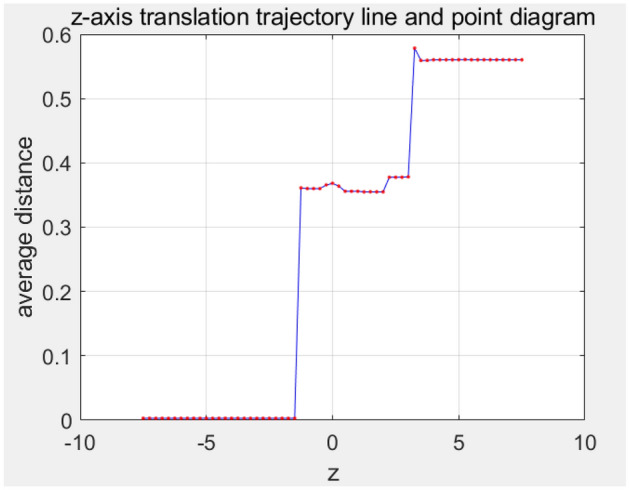 Figure 19
Figure 19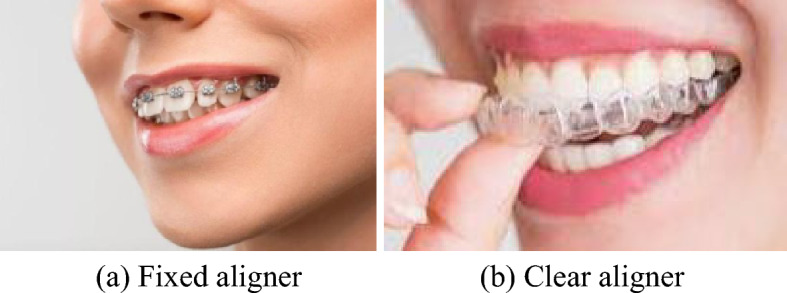 Figure 1
Figure 1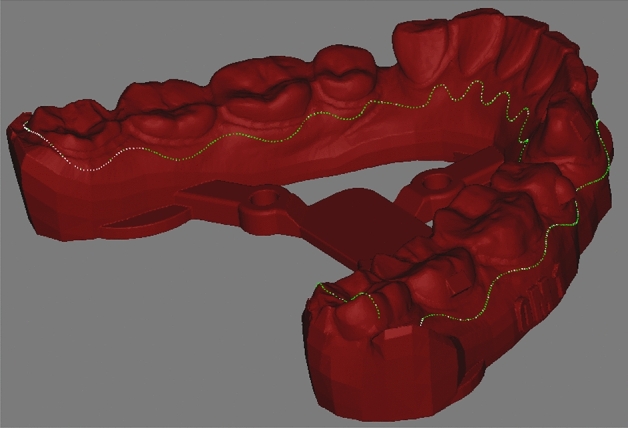 Figure 20
Figure 20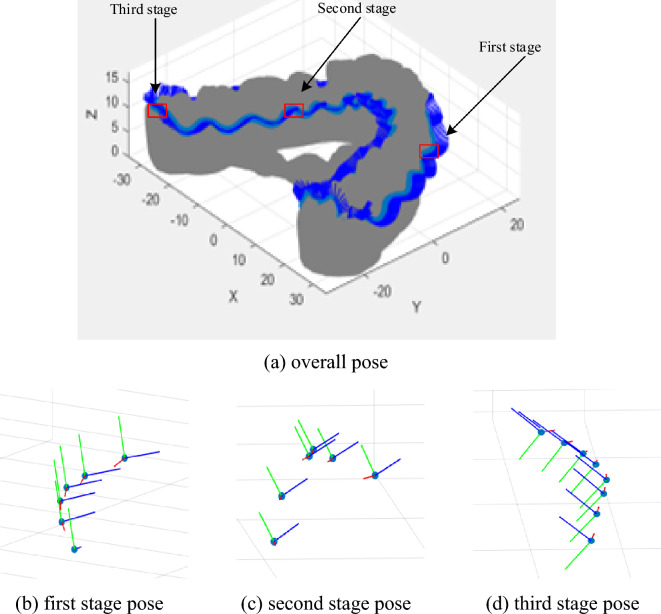 Figure 21
Figure 21 Figure 22
Figure 22 Figure 23
Figure 23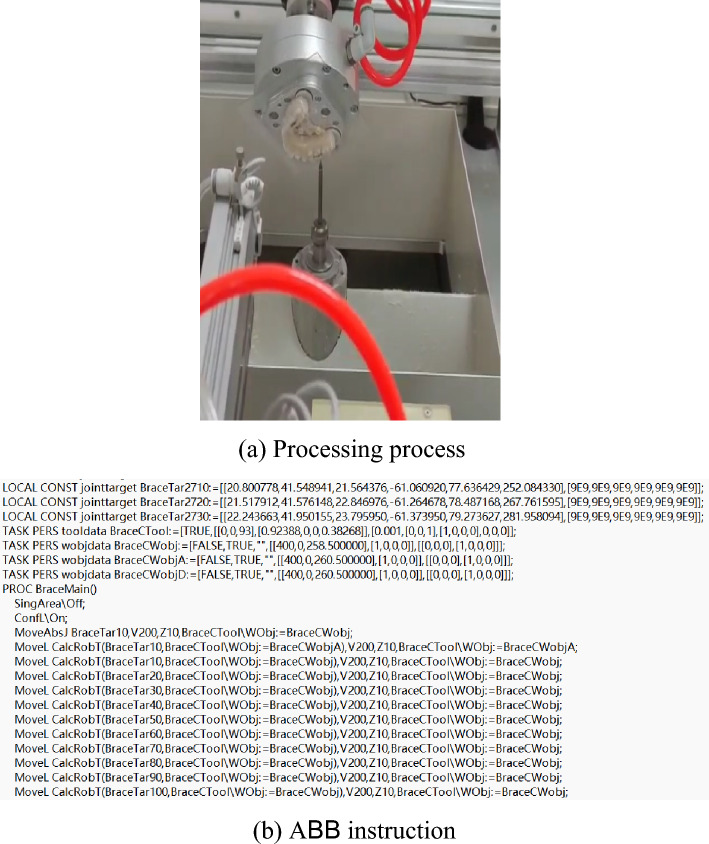 Figure 24
Figure 24 Figure 25
Figure 25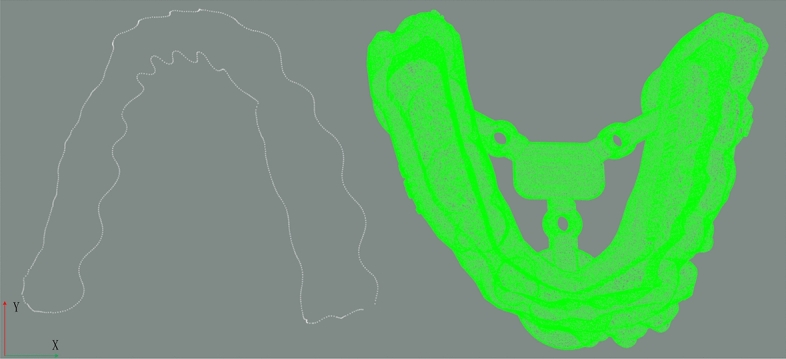 Figure 2
Figure 2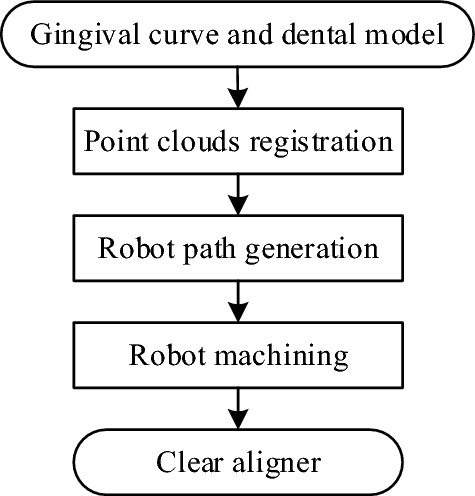 Figure 3
Figure 3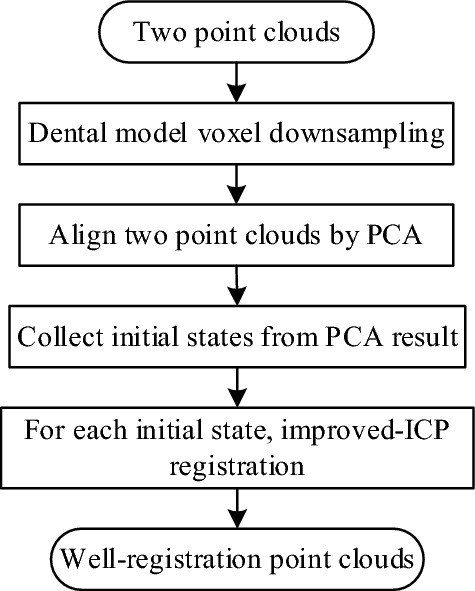 Figure 4
Figure 4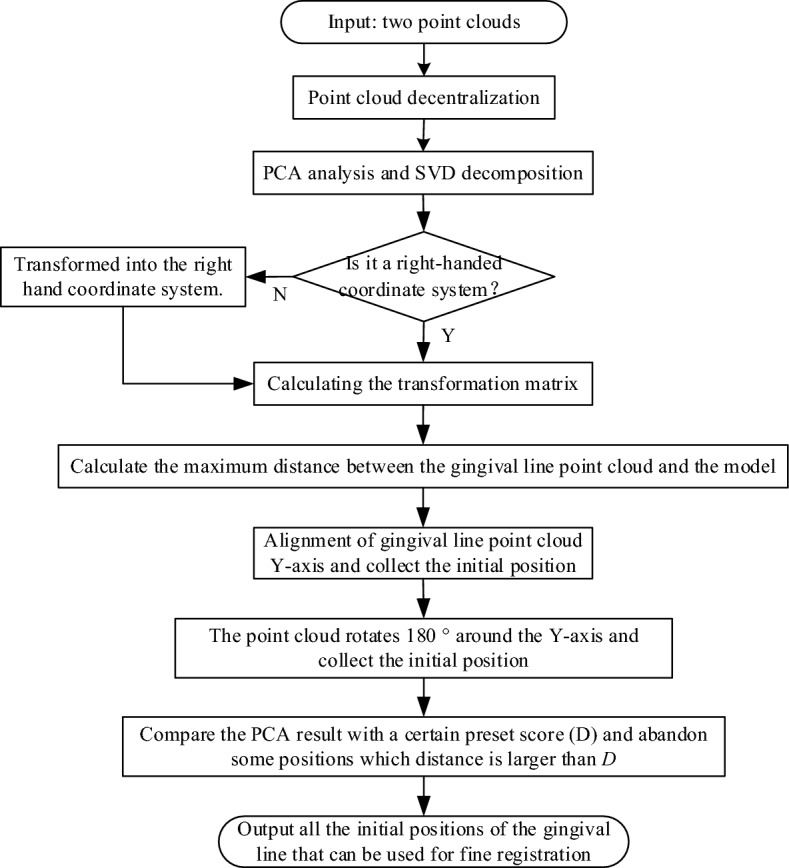 Figure 5
Figure 5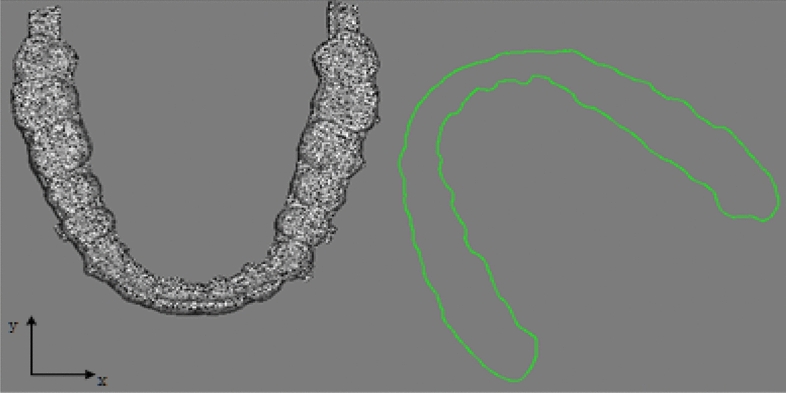 Figure 6
Figure 6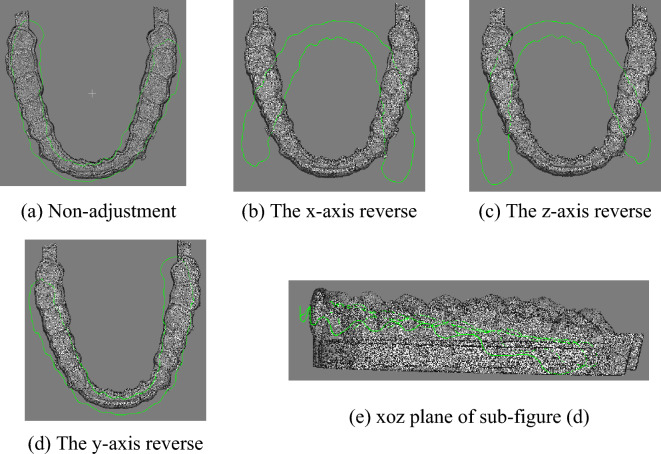 Figure 7
Figure 7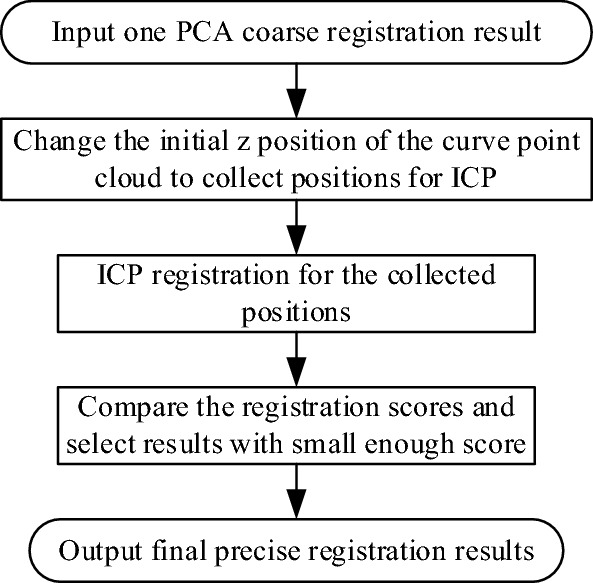 Figure 8
Figure 8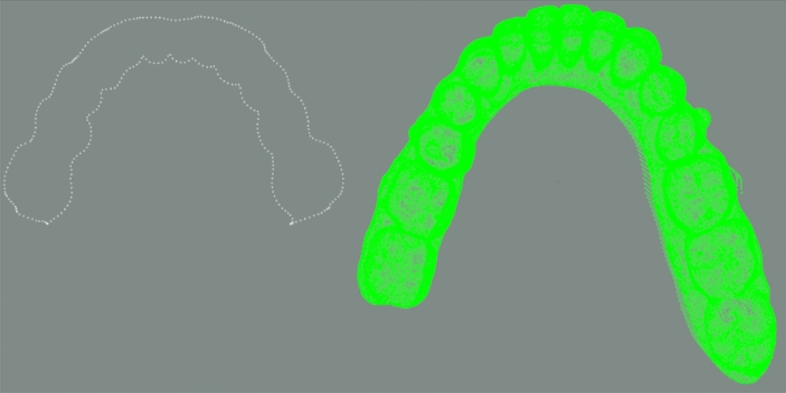 Figure 9
Figure 9Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsDental Implant Techniques and Outcomes · Robot Manipulation and Learning · Orthodontics and Dentofacial Orthopedics