Place Recognition through Multiple LiDAR Scans Based on the Hidden Markov Model
Linqiu Gui, Chunnian Zeng, Jie Luo, Xu Yang

TL;DR
This paper introduces a new method for improving place recognition in autonomous vehicles using multiple LiDAR scans and a hidden Markov model.
Contribution
The novelty is a multi-frame descriptor-matching approach using HMM to improve place recognition accuracy.
Findings
The proposed method improves place recognition accuracy by 5.8% on average.
Maximum performance improvement reaches 15.3% compared to single-frame methods.
Abstract
Autonomous driving systems for unmanned ground vehicles (UGV) operating in enclosed environments strongly rely on LiDAR localization with a prior map. Precise initial pose estimation is critical during system startup or when tracking is lost, ensuring safe UGV operation. Existing LiDAR-based place recognition methods often suffer from reduced accuracy due to only matching descriptors from individual LiDAR keyframes. This paper proposes a multi-frame descriptor-matching approach based on the hidden Markov model (HMM) to address this issue. This method enhances the place recognition accuracy and robustness by leveraging information from multiple frames. Experimental results from the KITTI dataset demonstrate that the proposed method significantly enhances the place recognition performance compared with the scan context-based single-frame descriptor-matching approach, with an average…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
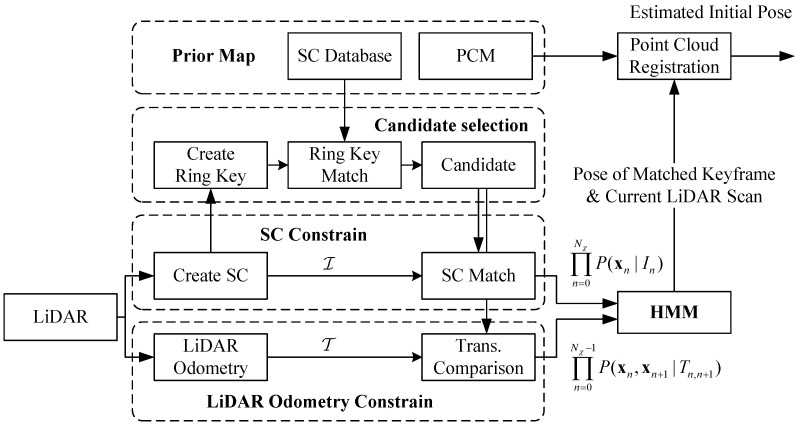 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4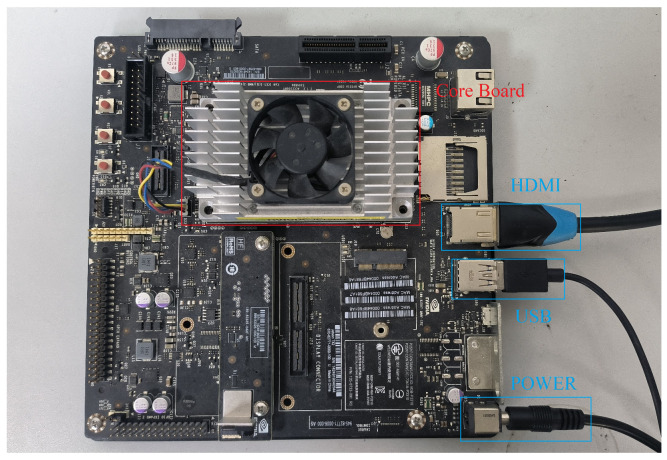 Figure 5
Figure 5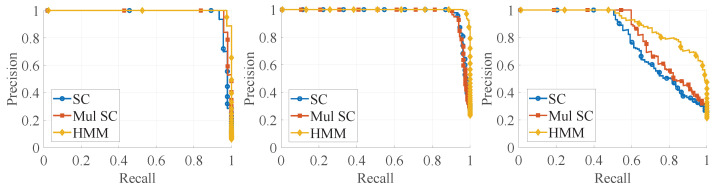 Figure 6
Figure 6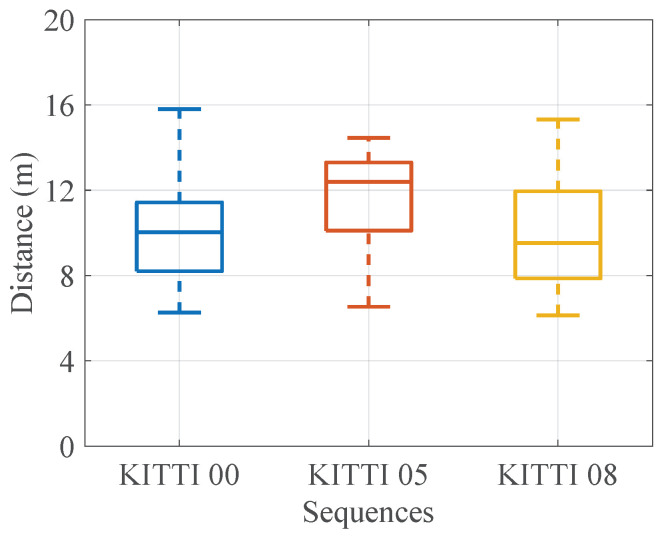 Figure 7
Figure 7Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotics and Sensor-Based Localization · Indoor and Outdoor Localization Technologies · Remote Sensing and LiDAR Applications