Robust Point Cloud Registration for Aircraft Engine Pipeline Systems
Yusong Liu, Zhihai Wang, Jichuan Huang, Liyan Zhang

TL;DR
This paper introduces a new method for accurately aligning 3D scans of aircraft engine pipelines, even when parts of the scans are missing.
Contribution
A novel registration framework with a new 3D descriptor (PL-PPFs) tailored for aircraft pipeline point cloud alignment.
Findings
The proposed framework effectively handles occlusions and similar structures in aircraft pipeline scans.
The PL-PPFs descriptor improves the accuracy of identifying pipeline structures in 3D point clouds.
Experimental results confirm the method's effectiveness on real aircraft engine pipeline data.
Abstract
Aircraft engine systems are composed of numerous pipelines. It is crucial to regularly inspect these pipelines to detect any damages or failures that could potentially lead to serious accidents. The inspection process typically involves capturing complete 3D point clouds of the pipelines using 3D scanning techniques from multiple viewpoints. To obtain a complete and accurate representation of the aircraft pipeline system, it is necessary to register and align the individual point clouds acquired from different views. However, the structures of aircraft pipelines often appear similar from different viewpoints, and the scanning process is prone to occlusions, resulting in incomplete point cloud data. The occlusions pose a challenge for existing registration methods, as they can lead to missing or wrong correspondences. To this end, we present a novel registration framework specifically…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
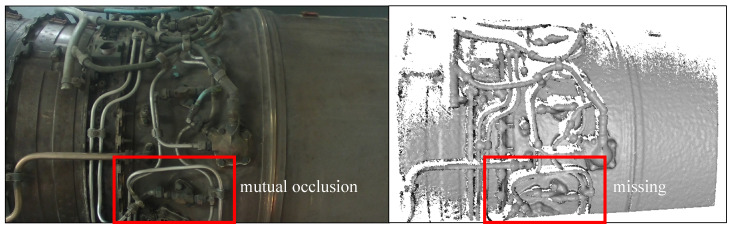 Figure 1
Figure 1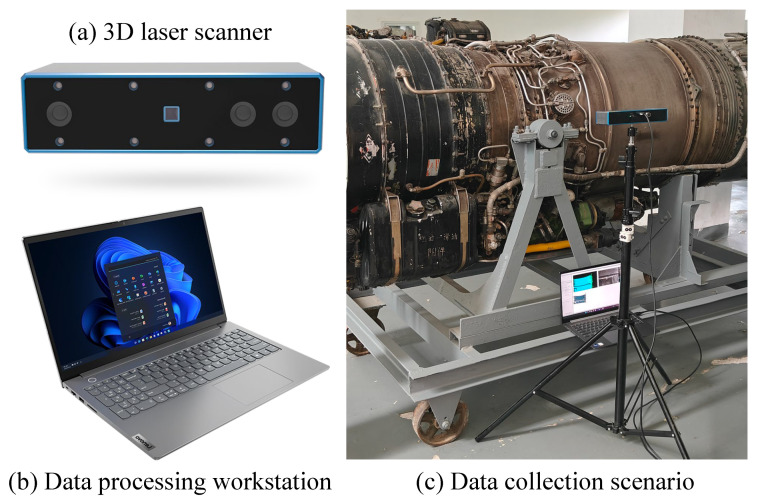 Figure 2
Figure 2 Figure 3
Figure 3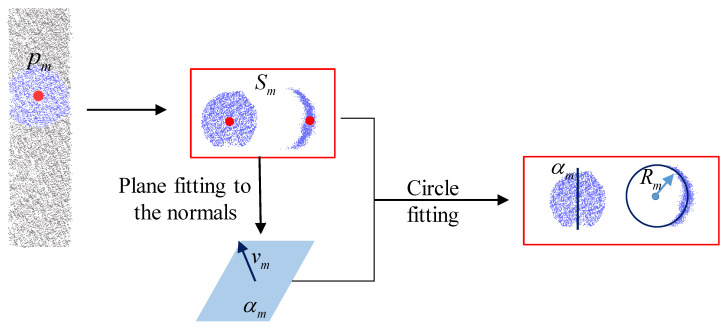 Figure 4
Figure 4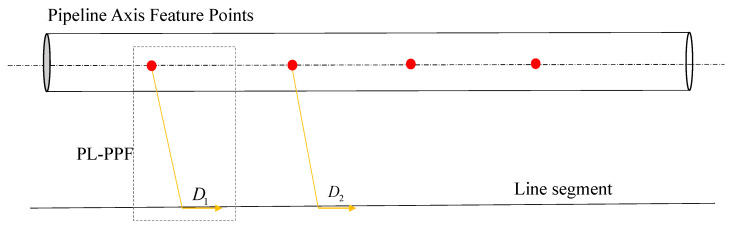 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
Topics3D Surveying and Cultural Heritage · Remote Sensing and LiDAR Applications · Robotics and Sensor-Based Localization