Highly smooth and parameter independent obstacle avoidance method for autonomous vehicle with velocity-varying obstacle
Nanxi Yi, Zhixian Liu, Xiaofang Yuan

TL;DR
This paper introduces a new obstacle avoidance method for autonomous vehicles that works well with moving obstacles and doesn't rely on parameter tuning.
Contribution
HSPI-OAM is a novel obstacle avoidance method that is highly smooth and parameter independent for velocity-varying obstacles.
Findings
HSPI-OAM uses a virtual collision point model to design smooth paths.
The method shows strong adaptability without parameter adjustment.
Simulation results confirm good performance for accelerating obstacles.
Abstract
One of the primary challenges for autonomous vehicle (AV) is planning a collision-free path in dynamic environment. It is a tricky task for achieving high-performance obstacle avoidance with velocity-varying obstacle. To solve this problem, a highly smooth and parameter independent obstacle avoidance method for autonomous vehicle with velocity-varying obstacle (HSPI-OAM) is presented in this work. The proposed method uses the virtual collision point model to accurately design the desired acceleration, which makes the obtained path highly smooth. At the same time, the method gets rid of the dependence on parameter adjustment and has strong adaptability to different environments. The simulation is implemented on the Matlab-Carsim co-simulation platform, and the simulation results show that the path planned by HSPI-OAM has good performance for obstacle with acceleration.
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13 Figure 14
Figure 14 Figure 15
Figure 15 Figure 16
Figure 16 Figure 17
Figure 17 Figure 18
Figure 18 Figure 19
Figure 19 Figure 20
Figure 20 Figure 21
Figure 21 Figure 22
Figure 22 Figure 23
Figure 23 Figure 24
Figure 24 Figure 25
Figure 25 Figure 26
Figure 26 Figure 27
Figure 27 Figure 28
Figure 28 Figure 29
Figure 29 Figure 30
Figure 30 Figure 31
Figure 31 Figure 32
Figure 32 Figure 33
Figure 33 Figure 34
Figure 34 Figure 35
Figure 35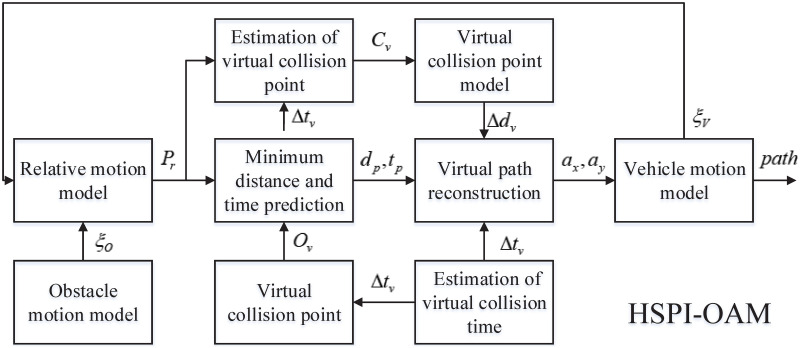 Figure 36
Figure 36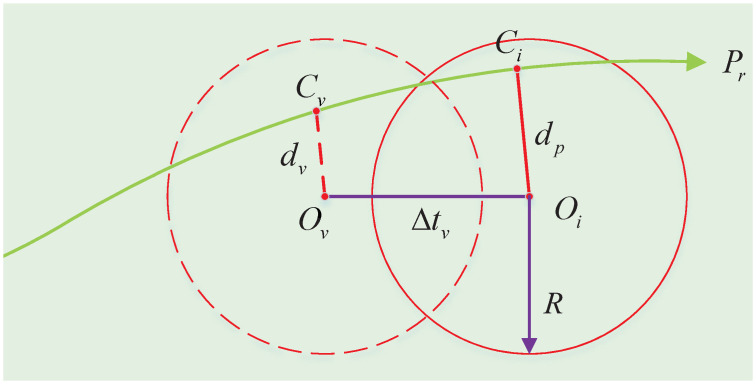 Figure 37
Figure 37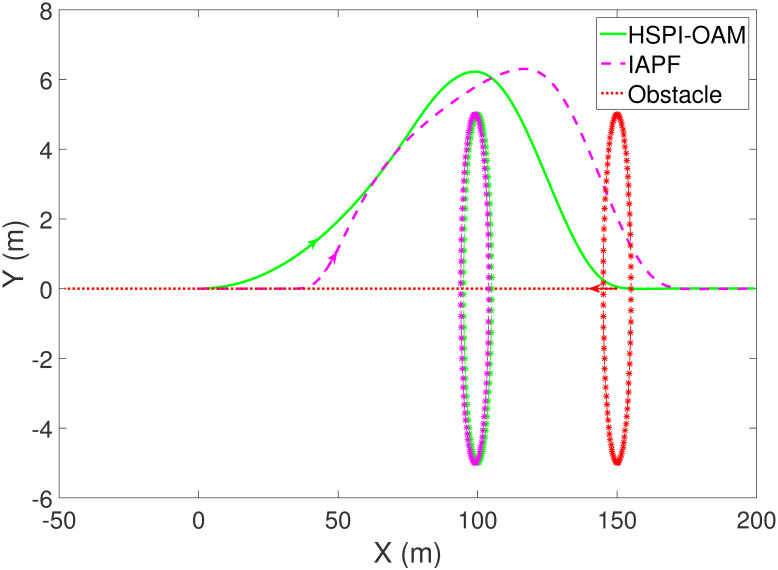 Figure 38
Figure 38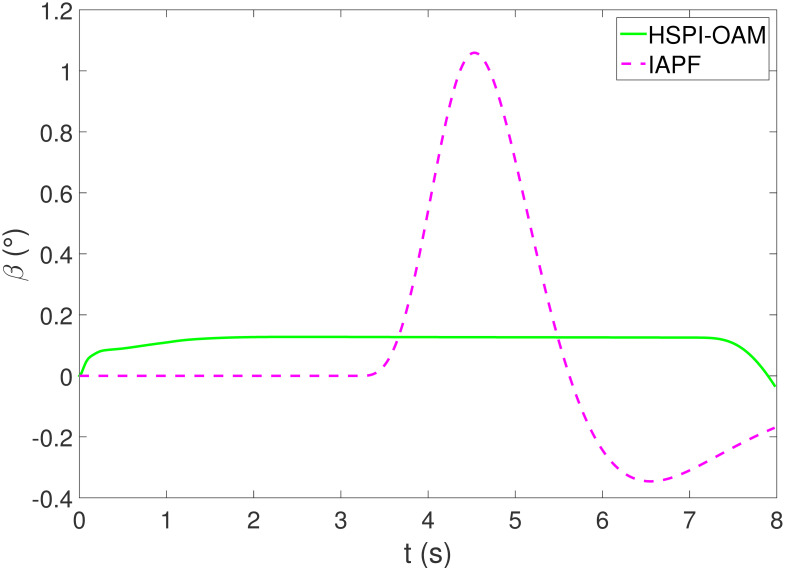 Figure 39
Figure 39 Figure 40
Figure 40 Figure 41
Figure 41 Figure 42
Figure 42 Figure 43
Figure 43 Figure 44
Figure 44 Figure 45
Figure 45 Figure 46
Figure 46 Figure 47
Figure 47 Figure 48
Figure 48 Figure 49
Figure 49 Figure 50
Figure 50Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Path Planning Algorithms · Autonomous Vehicle Technology and Safety · Vehicle Dynamics and Control Systems