Depth Control of an Underwater Sensor Platform: Comparison between Variable Buoyancy and Propeller Actuated Devices
João Falcão Carneiro, João Bravo Pinto, Fernando Gomes de Almeida, Nuno A. Cruz

TL;DR
This paper compares two methods for controlling the depth of underwater robots: changing buoyancy or using propellers, focusing on energy use and control accuracy.
Contribution
The study introduces a detailed energy-aware model for depth control systems and evaluates PID controllers for optimizing energy and performance trade-offs.
Findings
Variable buoyancy systems offer better energy efficiency for long missions.
Propeller actuated devices provide faster and more accurate depth adjustments.
PID controllers can effectively manage trade-offs between energy consumption and control accuracy.
Abstract
Underwater long-endurance platforms are crucial for continuous oceanic observation, allowing for sustained data collection from a multitude of sensors deployed across diverse underwater environments. They extend mission durations, reduce maintenance needs, and significantly improve the efficiency and cost-effectiveness of oceanographic research endeavors. This paper investigates the closed-loop depth control of actuation systems employed in underwater vehicles, focusing on the energy consumption of two different mechanisms: variable buoyancy and propeller actuated devices. Using a prototype previously developed by the authors, this paper presents a detailed model of the vehicle using both actuation solutions. The proposed model, although being a linear-based one, accounts for several nonlinearities that are present such as saturations, sensor quantization, and the actuator brake model.…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
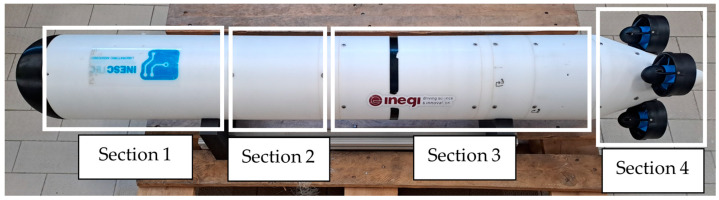 Figure 1
Figure 1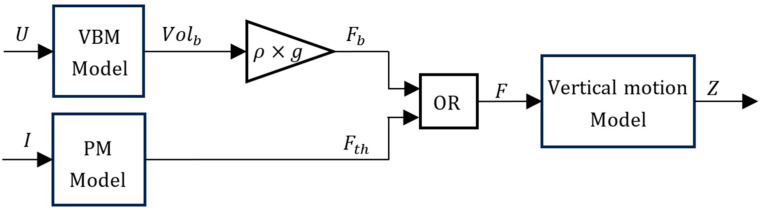 Figure 2
Figure 2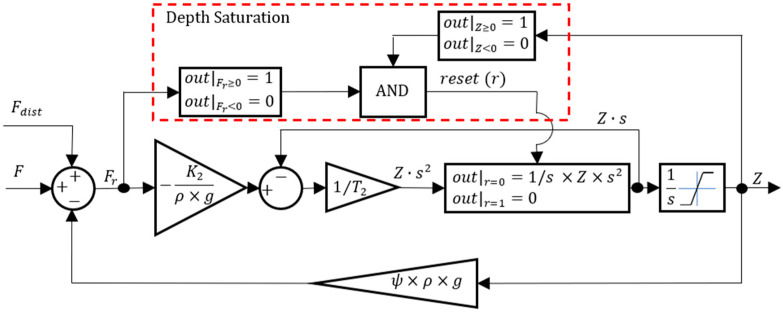 Figure 3
Figure 3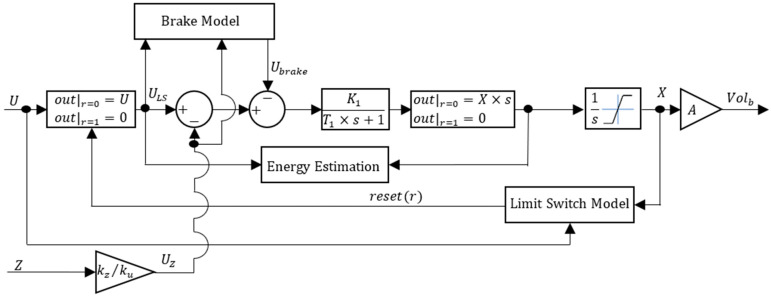 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13 Figure 14
Figure 14 Figure 15
Figure 15 Figure 16
Figure 16 Figure 17
Figure 17 Figure 18
Figure 18 Figure 19
Figure 19 Figure 20
Figure 20 Figure 21
Figure 21 Figure 22
Figure 22 Figure 23
Figure 23 Figure 24
Figure 24Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsUnderwater Vehicles and Communication Systems · Wave and Wind Energy Systems · Ship Hydrodynamics and Maneuverability