An Adaptive Control Scheme Based on Non-Interference Nonlinearity Approximation for a Class of Nonlinear Cascaded Systems and Its Application to Flexible Joint Manipulators
Zhangxing Liu, Hongzhe Jin, Jie Zhao

TL;DR
This paper introduces a new adaptive control method for complex nonlinear systems, showing improved performance in simulations and experiments.
Contribution
A novel nonlinearity approximation scheme with a simplified structure for adaptive control of cascaded systems.
Findings
The proposed controller outperforms radial basis function network control in simulations and experiments.
The method achieves stability even with unmodeled uncertainties through a squared-error correction procedure.
The controller is validated on a flexible joint system, demonstrating robustness and simplicity.
Abstract
Control design for the nonlinear cascaded system is challenging due to its complicated system dynamics and system uncertainty, both of which can be considered some kind of system nonlinearity. In this paper, we propose a novel nonlinearity approximation scheme with a simplified structure, where the system nonlinearity is approximated by a steady component and an alternating component using only local tracking errors. The nonlinearity of each subsystem is estimated independently. On this basis, a model-free adaptive control for a class of nonlinear cascaded systems is proposed. A squared-error correction procedure is introduced to regulate the weight coefficients of the approximation components, which makes the whole adaptive system stable even with the unmodeled uncertainties. The effectiveness of the proposed controller is validated on a flexible joint system through numerical…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
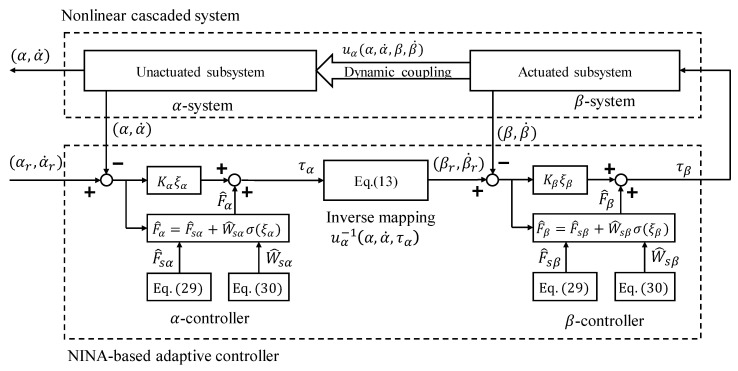 Figure 1
Figure 1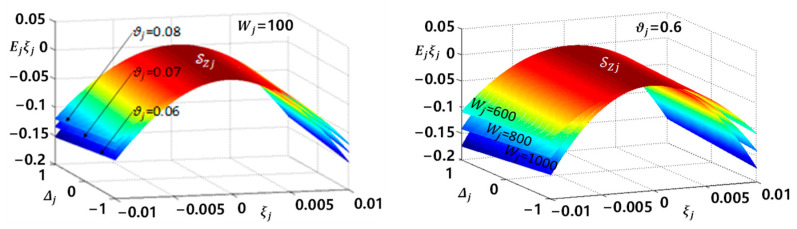 Figure 2
Figure 2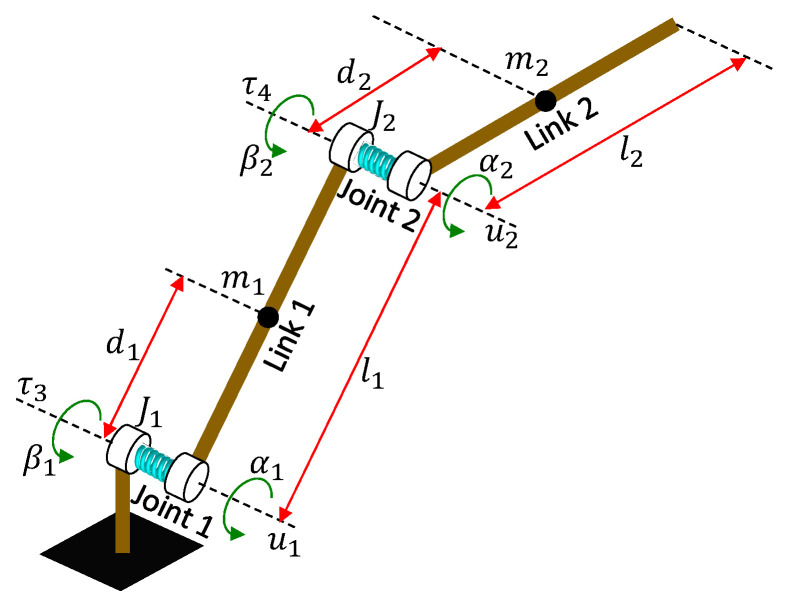 Figure 3
Figure 3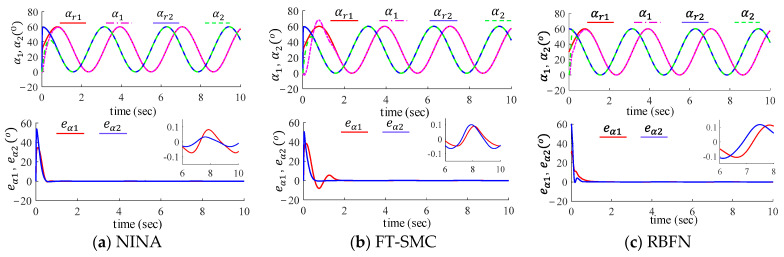 Figure 4
Figure 4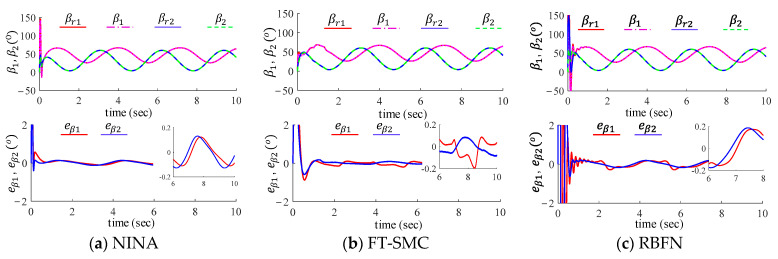 Figure 5
Figure 5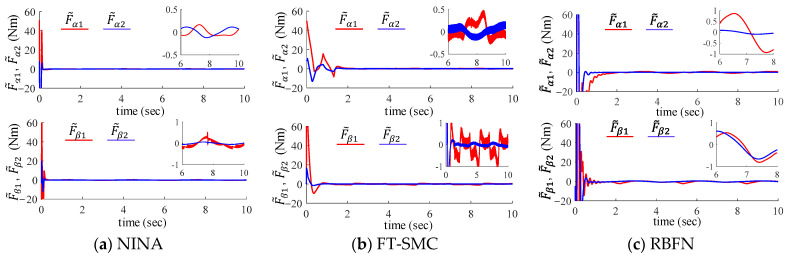 Figure 6
Figure 6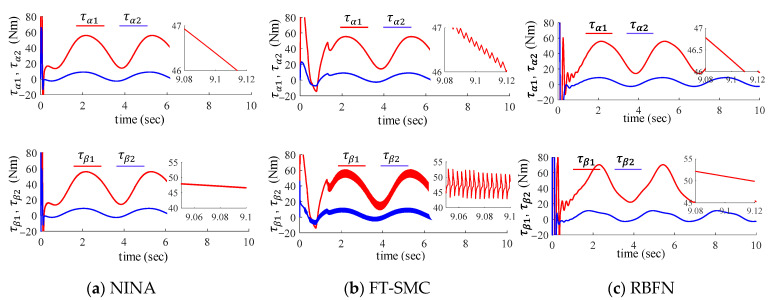 Figure 7
Figure 7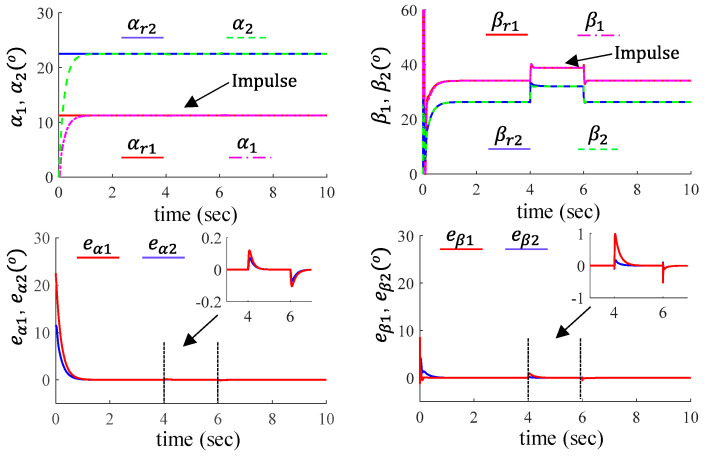 Figure 8
Figure 8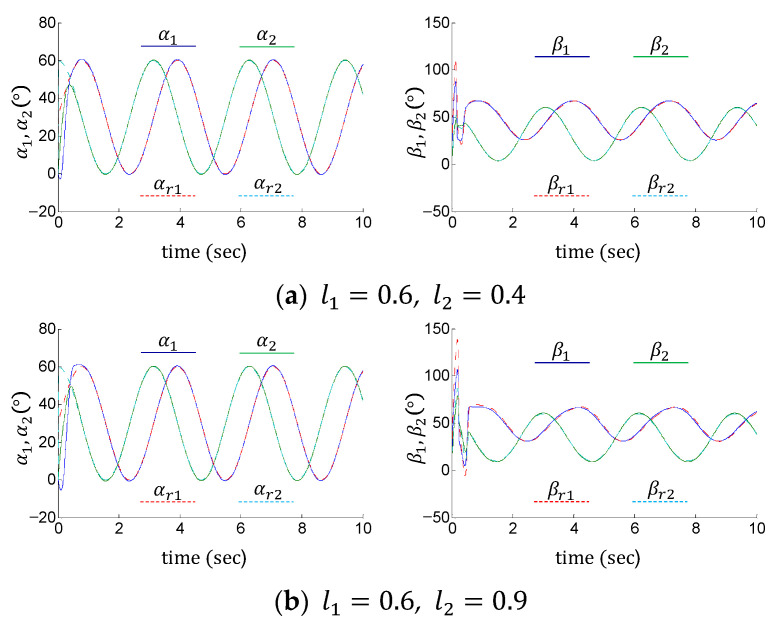 Figure 9
Figure 9 Figure 10
Figure 10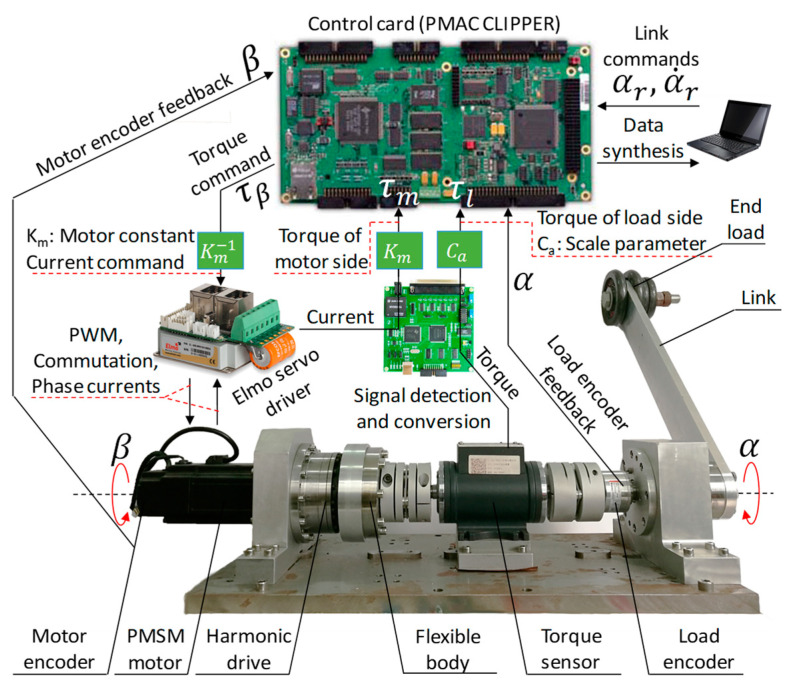 Figure 11
Figure 11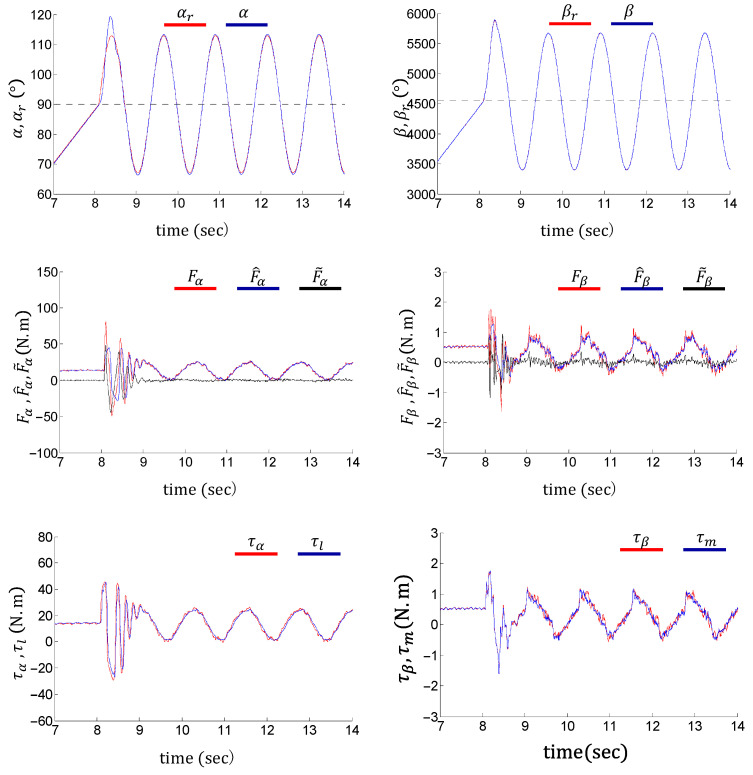 Figure 12
Figure 12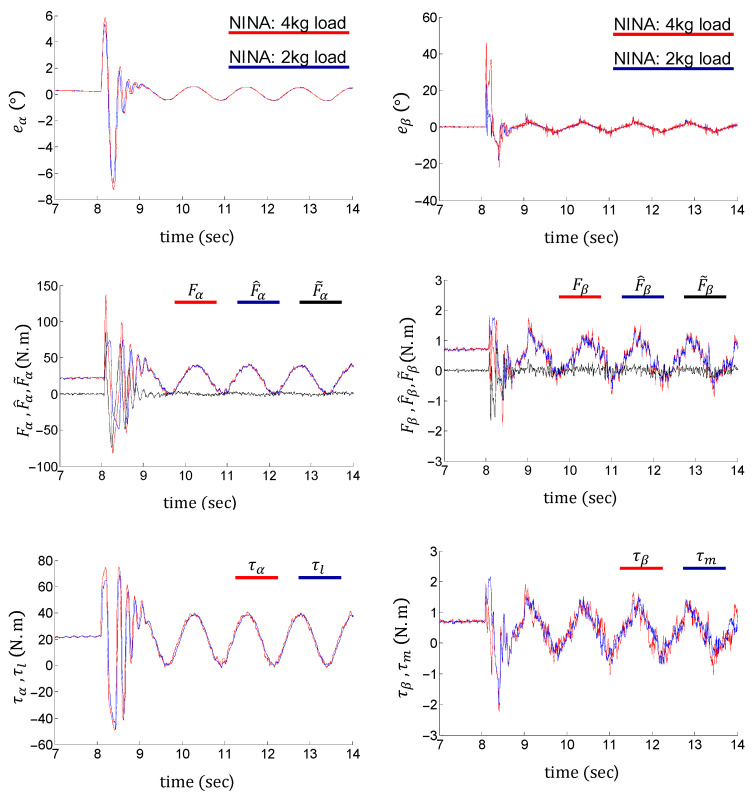 Figure 13
Figure 13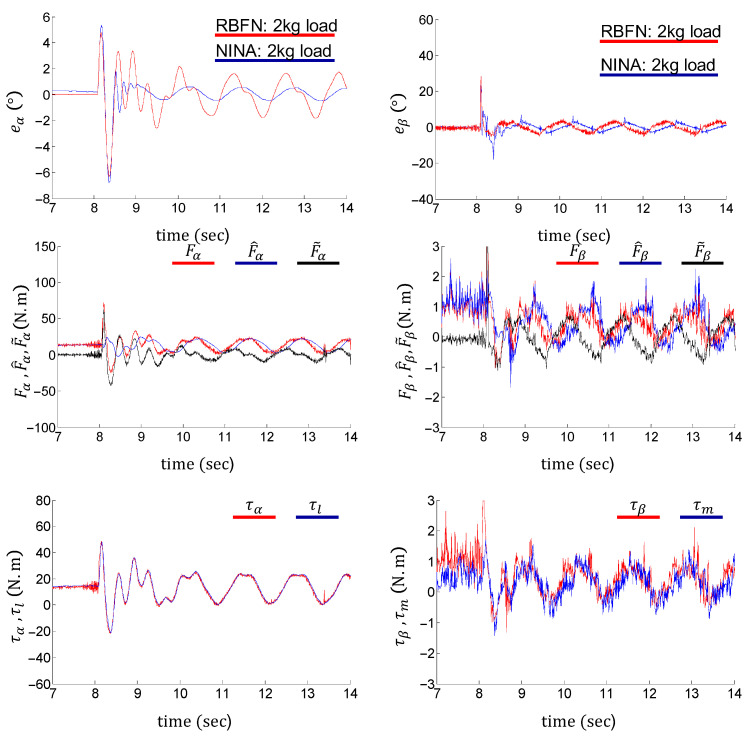 Figure 14
Figure 14Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsHydraulic and Pneumatic Systems · Iterative Learning Control Systems · Adaptive Control of Nonlinear Systems