Single Sequential Trajectory Optimization with Centroidal Dynamics and Whole-Body Kinematics for Vertical Jump of Humanoid Robot
Yaliang Liu, Xuechao Chen, Zhangguo Yu, Haoxiang Qi, Chuanku Yi

TL;DR
This paper introduces a new method for optimizing humanoid robot vertical jumps by combining centroidal dynamics and whole-body kinematics in a single optimization process.
Contribution
The novel contribution is a single sequential trajectory optimization method that integrates centroidal dynamics and whole-body kinematics for efficient vertical jumping.
Findings
The proposed method efficiently solves whole-body motion trajectories for vertical jumping.
A real humanoid robot achieved a vertical jump of 0.5 m in height using the optimized method.
Abstract
High vertical jumping motion, which enables a humanoid robot to leap over obstacles, is a direct reflection of its extreme motion capabilities. This article proposes a single sequential kino-dynamic trajectory optimization method to solve the whole-body motion trajectory for high vertical jumping motion. The trajectory optimization process is decomposed into two sequential optimization parts: optimization computation of centroidal dynamics and coherent whole-body kinematics. Both optimization problems converge on the common variables (the center of mass, momentum, and foot position) using cost functions while allowing for some tolerance in the consistency of the foot position. Additionally, complementarity conditions and a pre-defined contact sequence are implemented to constrain the contact force and foot position during the launching and flight phases. The whole-body trajectory,…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
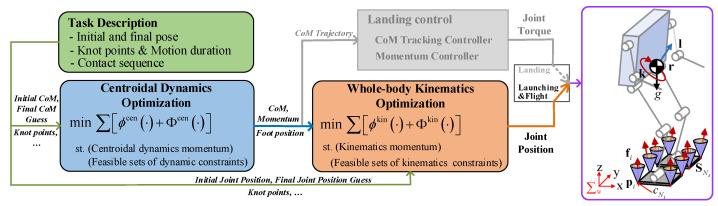 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4 Figure 5
Figure 5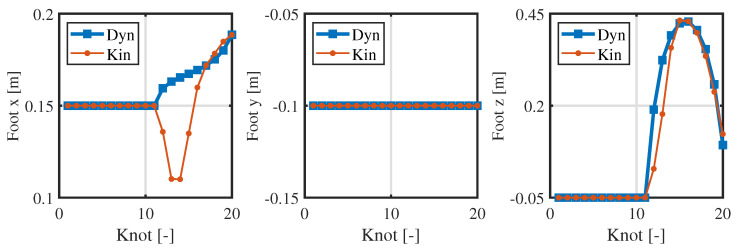 Figure 6
Figure 6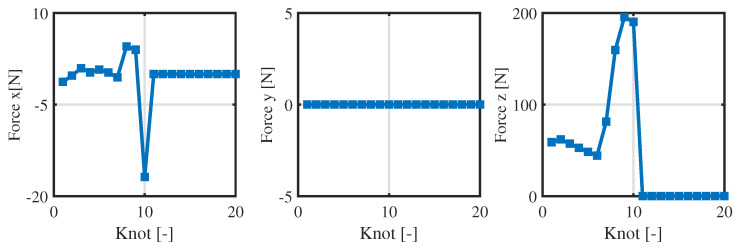 Figure 7
Figure 7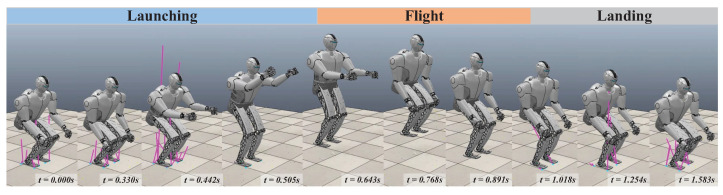 Figure 8
Figure 8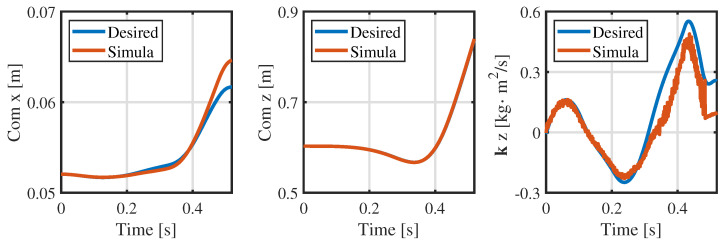 Figure 9
Figure 9 Figure 10
Figure 10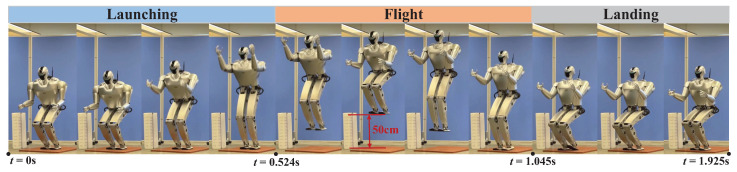 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13 Figure 14
Figure 14 Figure 15
Figure 15Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsFinance, Taxation, and Governance · Comparative International Legal Studies