Structural Design and Control Research of Multi-Segmented Biomimetic Millipede Robot
Hao Yin, Ruiqi Shi, Jiang Liu

TL;DR
This paper presents a new multi-segmented robot inspired by millipedes, designed for stability and adaptability in complex environments.
Contribution
A novel biomimetic millipede robot with a simplified CPG control strategy and validated performance on challenging terrains.
Findings
The robot walks stably using a wave-like gait under CPG control.
Leg failure has minimal impact on overall locomotion performance.
The robot maintains acceptable speed on complex terrain.
Abstract
Due to their advantages of good stability, adaptability, and flexibility, multi-legged robots are increasingly important in fields such as rescue, military, and healthcare. This study focuses on the millipede, a multi-segmented organism, and designs a novel multi-segment biomimetic robot based on an in-depth investigation of the millipede’s biological characteristics and locomotion mechanisms. Key leg joints of millipede locomotion are targeted, and a mathematical model of the biomimetic robot’s leg joint structure is established for kinematic analysis. Furthermore, a central pattern generator (CPG) control strategy is studied for multi-jointed biomimetic millipede robots. Inspired by the millipede’s neural system, a simplified single-loop CPG network model is constructed, reducing the number of oscillators from 48 to 16. Experimental trials are conducted using a prototype to test…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
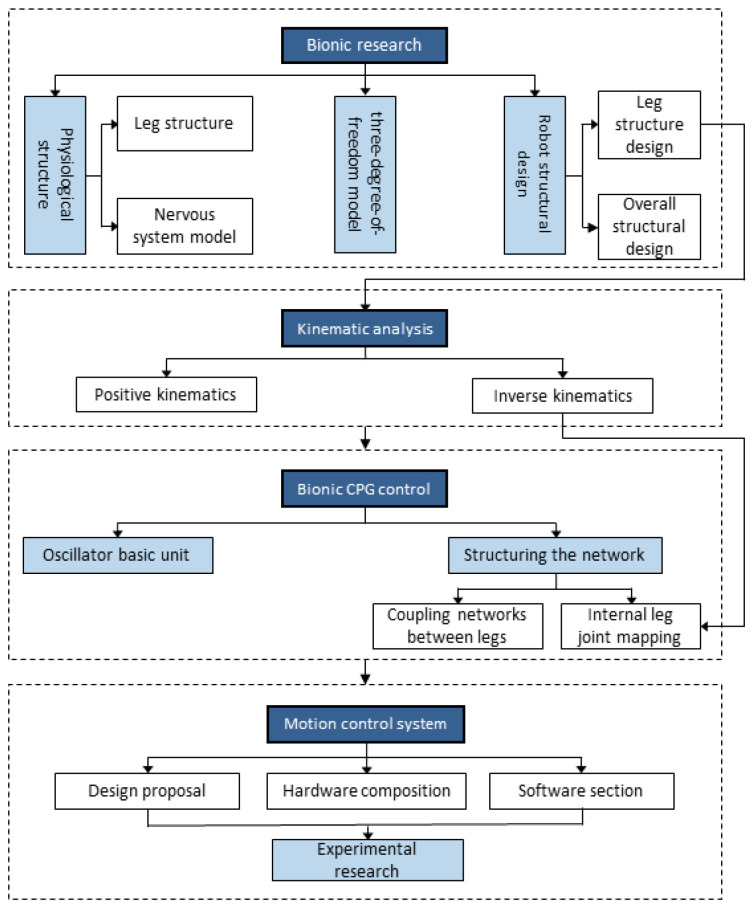 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4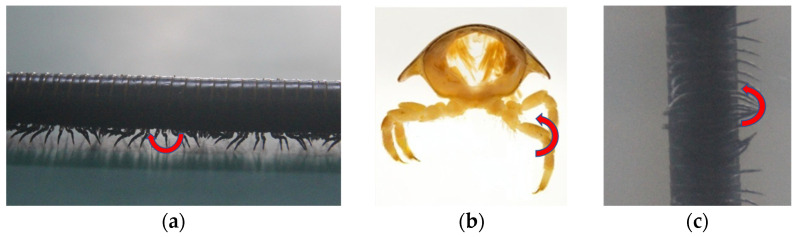 Figure 5
Figure 5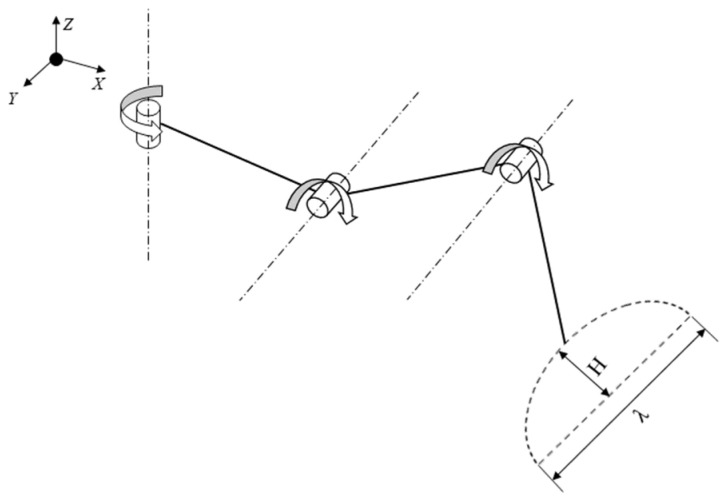 Figure 6
Figure 6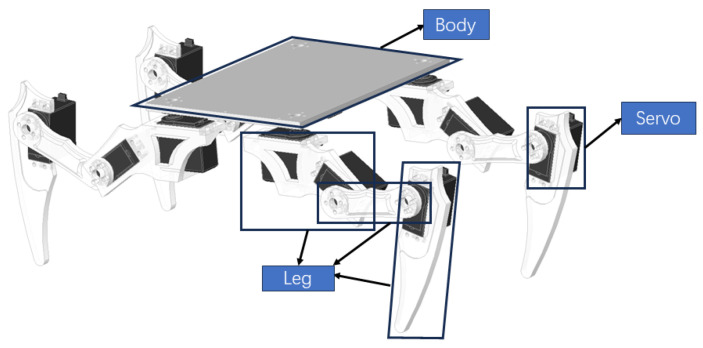 Figure 7
Figure 7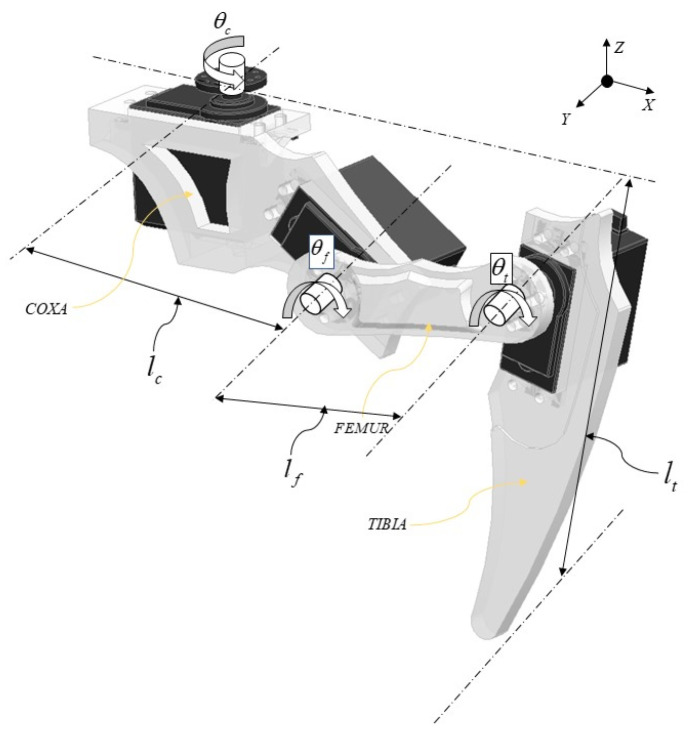 Figure 8
Figure 8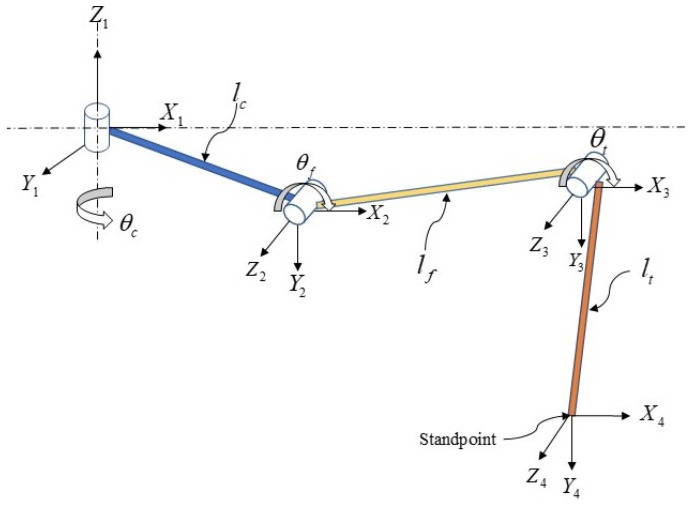 Figure 9
Figure 9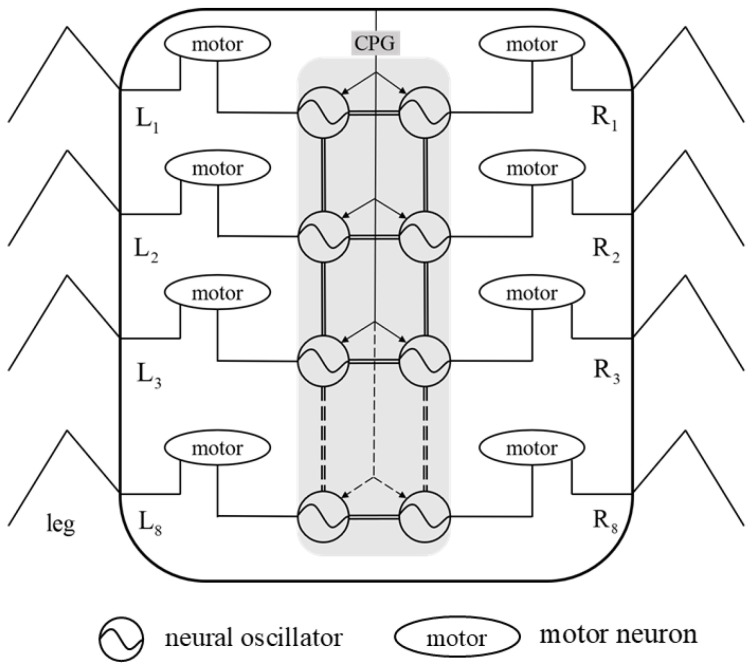 Figure 10
Figure 10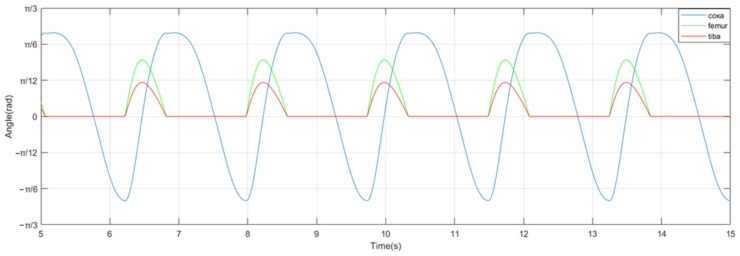 Figure 11
Figure 11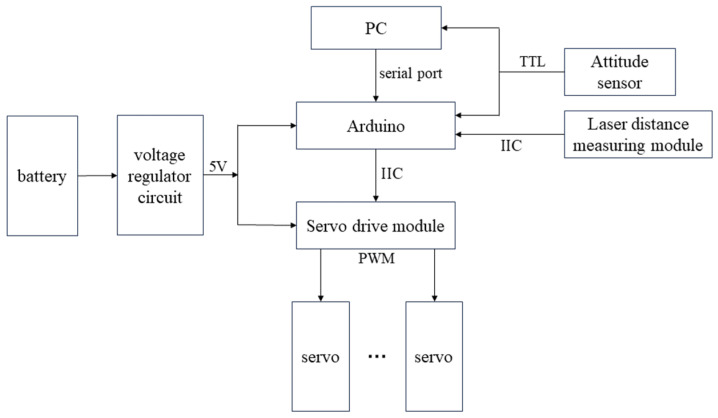 Figure 12
Figure 12 Figure 13
Figure 13 Figure 14
Figure 14 Figure 15
Figure 15 Figure 16
Figure 16 Figure 17
Figure 17 Figure 18
Figure 18 Figure 19
Figure 19 Figure 20
Figure 20 Figure 21
Figure 21 Figure 22
Figure 22 Figure 23
Figure 23 Figure 24
Figure 24 Figure 25
Figure 25 Figure 26
Figure 26Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Locomotion and Control · Prosthetics and Rehabilitation Robotics · Muscle activation and electromyography studies