A Sheet-Shaped Transforming Robot That Can Be Thrown from the Air
Naoki Iida, Mitsuharu Matsumoto

TL;DR
This paper introduces a sheet-shaped robot that can be thrown from the air to reach disaster sites efficiently.
Contribution
The novel contribution is a new prototype of a throwable sheet-shaped robot with improved mobility and transition capabilities.
Findings
The new robot prototype can be thrown from the air and transition smoothly to walking.
Previous prototypes had complex and uncertain transitions from falling to movement.
The improved design enhances the robot's practicality for disaster response scenarios.
Abstract
In this paper, we describe a sheet-shaped throwable transforming robot. Sheet-type robots can change their shape to perform tasks according to the situation. Therefore, they are expected to be useful in places with many restrictions, such as disaster sites. However, most of them can only move slowly on the ground. Therefore, in order to actually deliver the robot to the disaster site, it must be carried manually. To solve this problem, we are developing a sheet-shaped robot that can be thrown from the sky. Previously developed prototypes could only move in the forward direction, and the transition from falling to walking was complicated and uncertain. In this paper, we report on a new prototype that improves on these shortcomings.
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
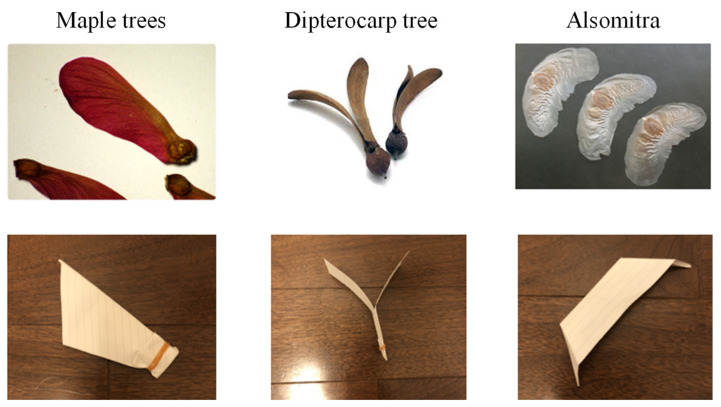 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3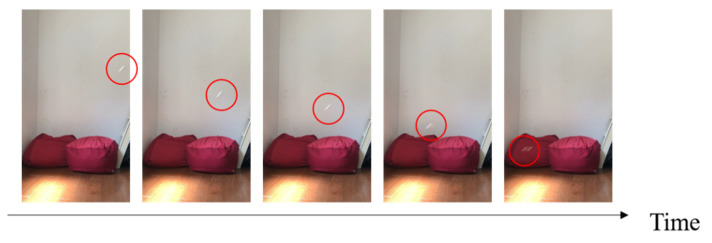 Figure 4
Figure 4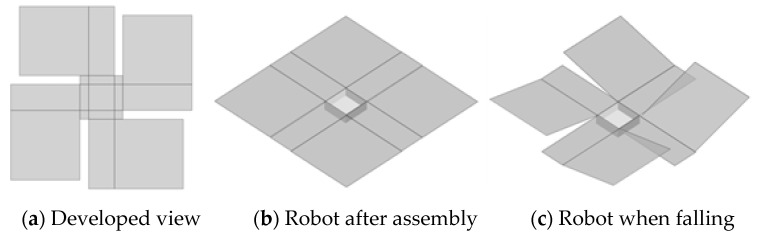 Figure 5
Figure 5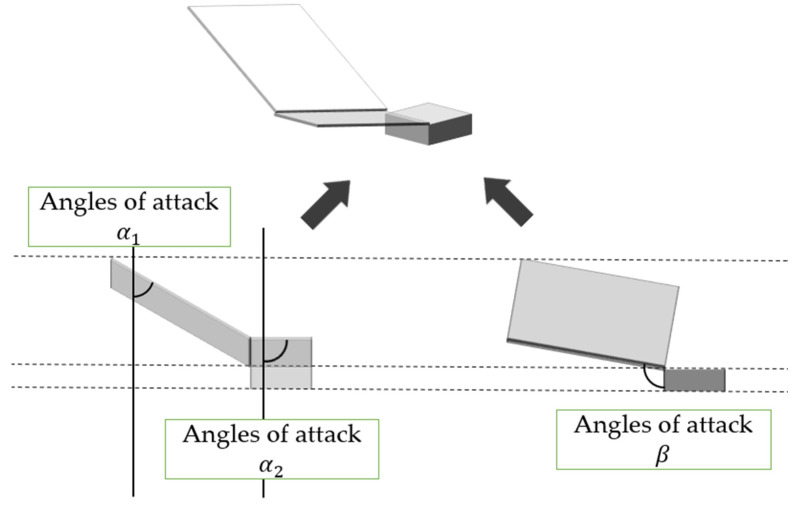 Figure 6
Figure 6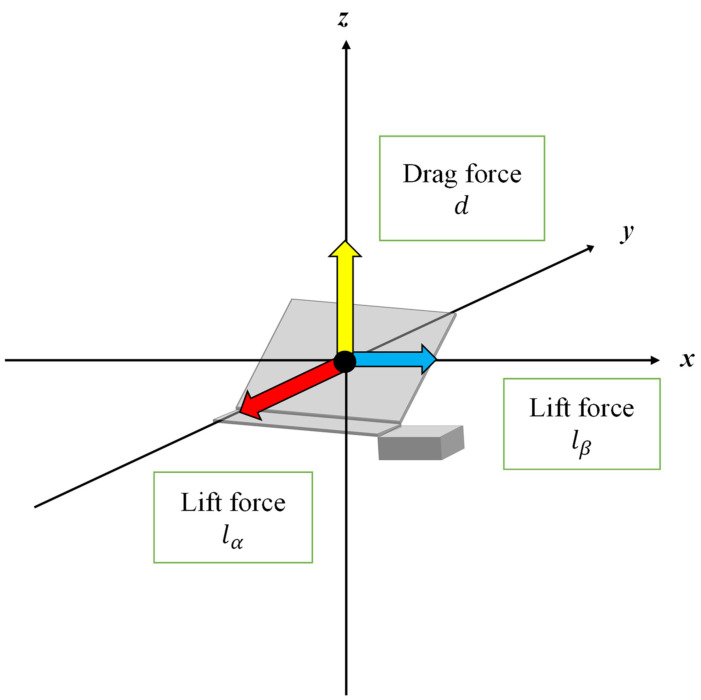 Figure 7
Figure 7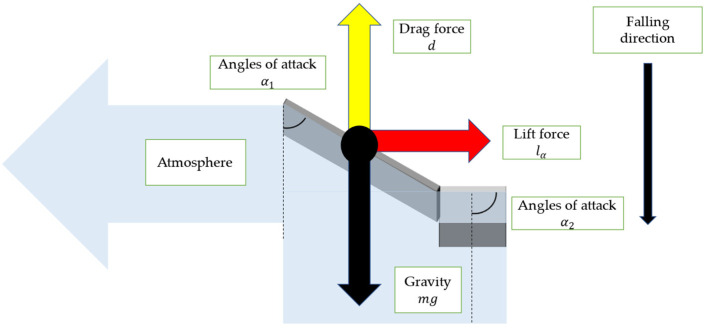 Figure 8
Figure 8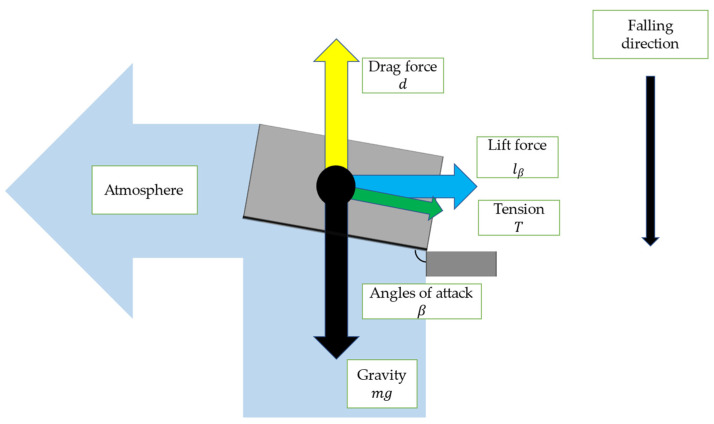 Figure 9
Figure 9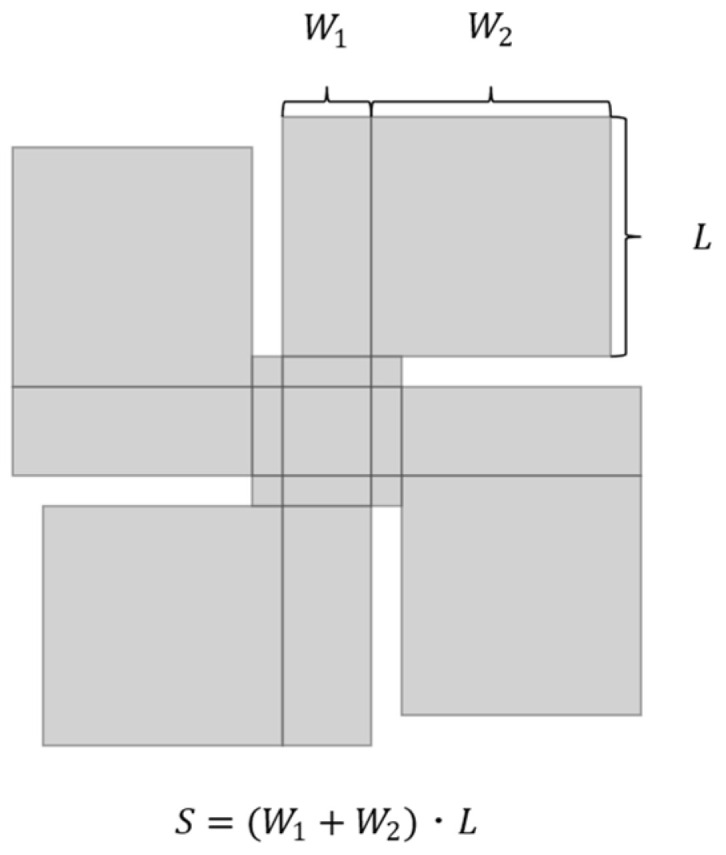 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13 Figure 14
Figure 14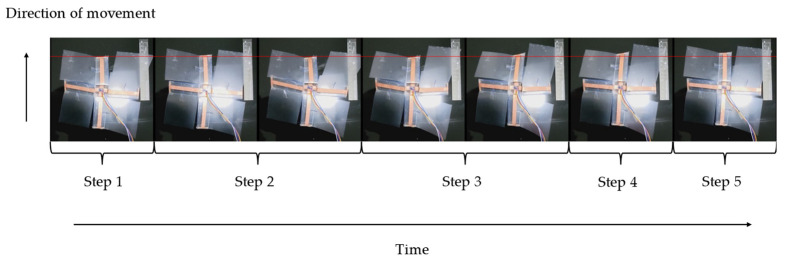 Figure 15
Figure 15 Figure 16
Figure 16 Figure 17
Figure 17 Figure 18
Figure 18Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsModular Robots and Swarm Intelligence · Robotic Locomotion and Control · Micro and Nano Robotics