RFG-TVIU: robust factor graph for tightly coupled vision/IMU/UWB integration
Gongjun Fan, Qing Wang, Gaochao Yang, Pengfei Liu

TL;DR
This paper introduces a robust multi-sensor navigation system combining vision, IMU, and UWB for improved accuracy in real-world scenarios.
Contribution
The novel adaptive robust factor graph model estimates UWB ranging covariance in real-time without prior calibration.
Findings
The proposed system outperforms state-of-the-art methods in all tested scenarios.
RMSE improvements of up to 82.15% are achieved in non-line-of-sight environments.
The model adapts to dynamic sensor availability and observation weight distribution issues.
Abstract
High precision navigation and positioning technology, as a fundamental function, is gradually occupying an indispensable position in the various fields. However, a single sensor cannot meet the navigation requirements in different scenarios. This paper proposes a “plug and play” Vision/IMU/UWB multi-sensor tightly-coupled system based on factor graph. The difference from traditional UWB-based tightly-coupled models is that the Vision/IMU/UWB tightly-coupled model in this study uses UWB base station coordinates as parameters for real-time estimation without pre-calibrating UWB base stations. Aiming at the dynamic change of sensor availability in multi-sensor integrated navigation system and the serious problem of traditional factor graph in the weight distribution of observation information, this study proposes an adaptive robust factor graph model. Based on redundant measurement…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
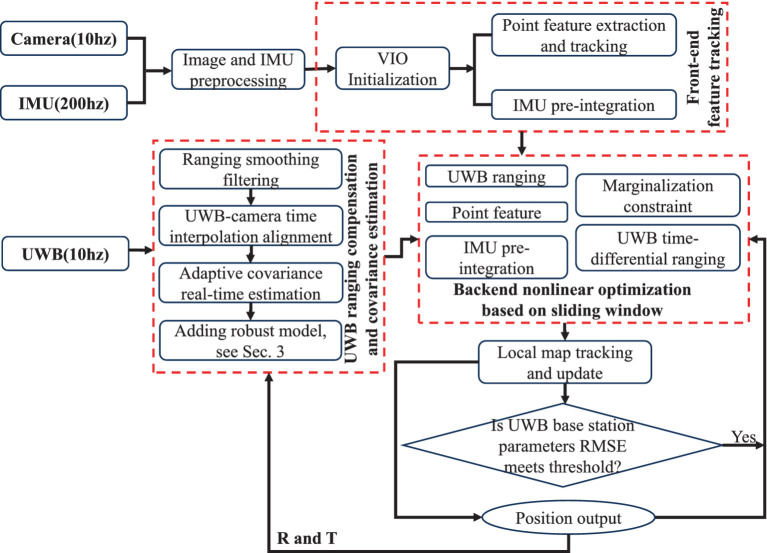 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4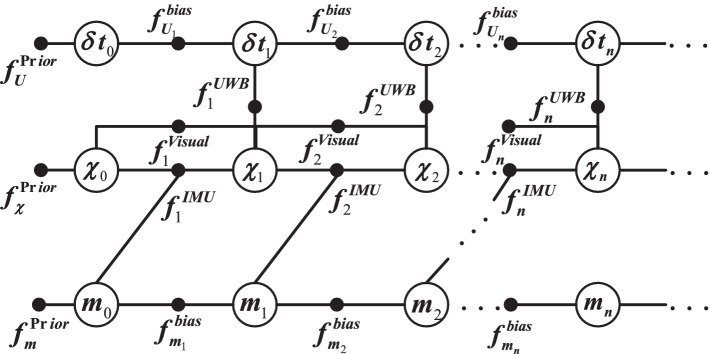 Figure 5
Figure 5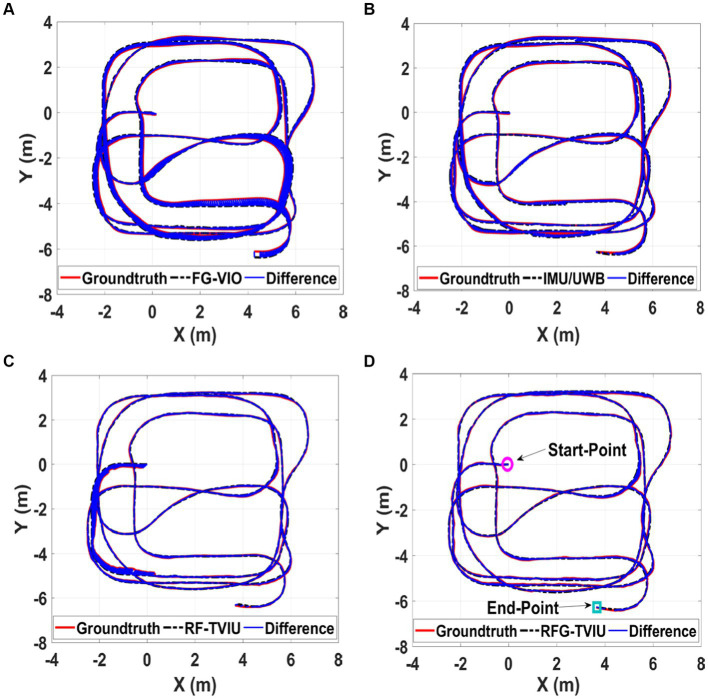 Figure 6
Figure 6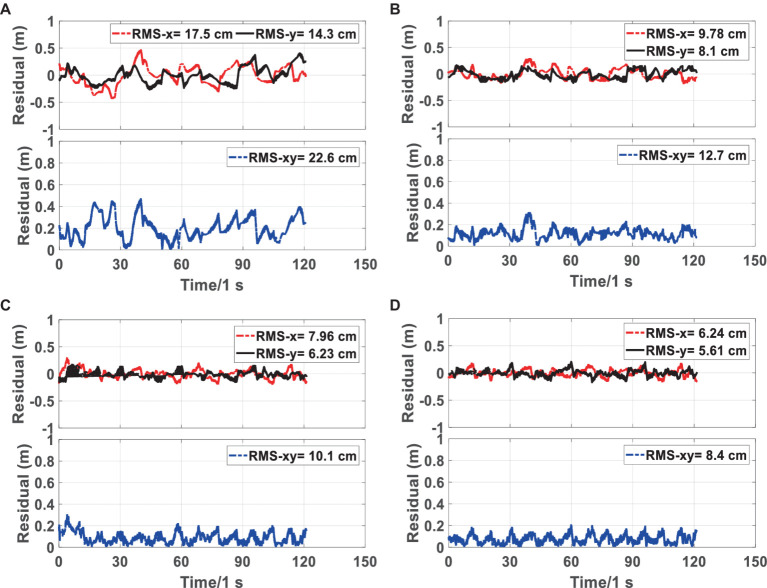 Figure 7
Figure 7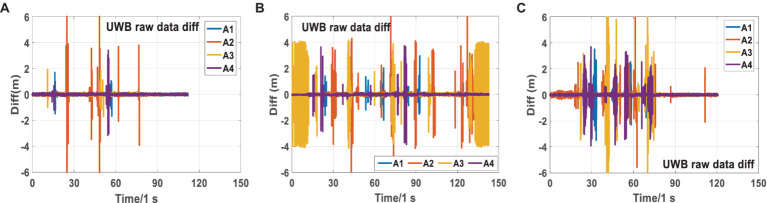 Figure 8
Figure 8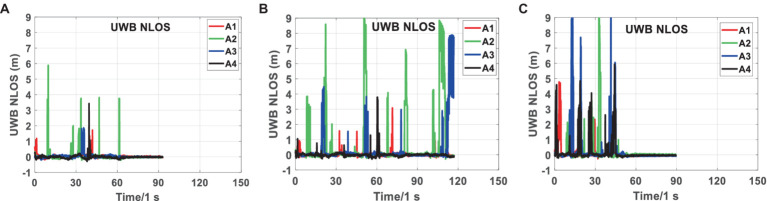 Figure 9
Figure 9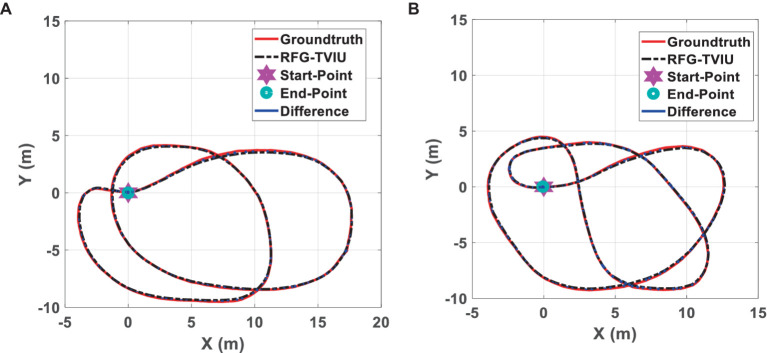 Figure 10
Figure 10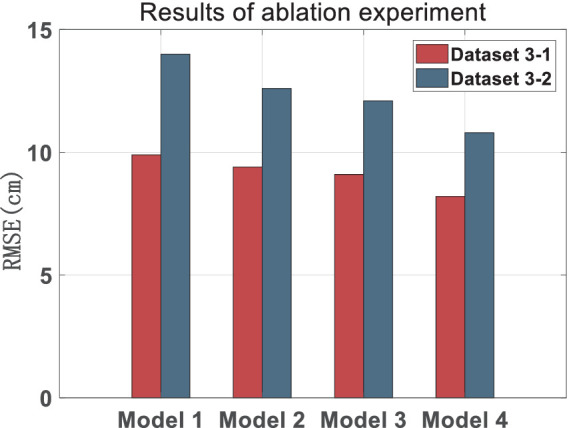 Figure 11
Figure 11Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsIndoor and Outdoor Localization Technologies · Robotics and Sensor-Based Localization · Target Tracking and Data Fusion in Sensor Networks