Advanced Planar Projection Contour (PPC): A Novel Algorithm for Local Feature Description in Point Clouds
Wenbin Tang, Yinghao Lv, Yongdang Chen, Linqing Zheng, Runxiao Wang

TL;DR
This paper introduces a new method for describing 3D point cloud features that is robust and efficient, even in challenging conditions.
Contribution
The novel PPC descriptor uses planar projection contours to improve robustness and efficiency in point cloud feature description.
Findings
PPC achieves over 80% accuracy across all recall levels on benchmark datasets.
The method remains effective under high-noise and varying point density conditions.
Planar projection contours provide a robust and efficient way to encode local features.
Abstract
Local feature description of point clouds is essential in 3D computer vision. However, many local feature descriptors for point clouds struggle with inadequate robustness, excessive dimensionality, and poor computational efficiency. To address these issues, we propose a novel descriptor based on Planar Projection Contours, characterized by convex packet contour information. We construct the Local Reference Frame (LRF) through covariance analysis of the query point and its neighboring points. Neighboring points are projected onto three orthogonal planes defined by the LRF. These projection points on the planes are fitted into convex hull contours and encoded as local features. These planar features are then concatenated to create the Planar Projection Contour (PPC) descriptor. We evaluated the performance of the PPC descriptor against classical descriptors using the B3R, UWAOR, and…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
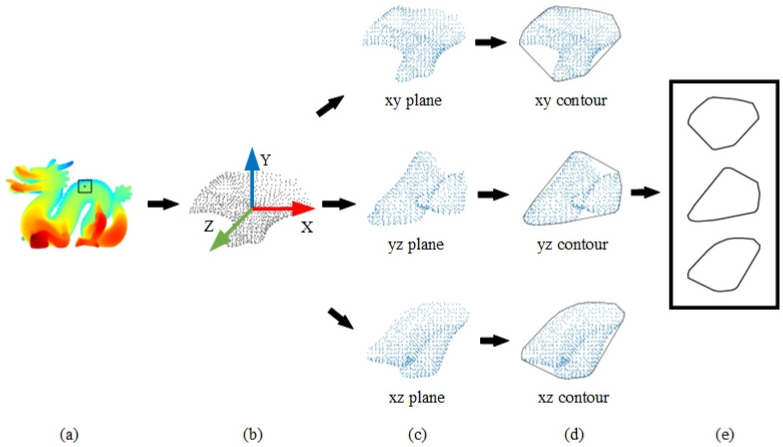 Figure 1
Figure 1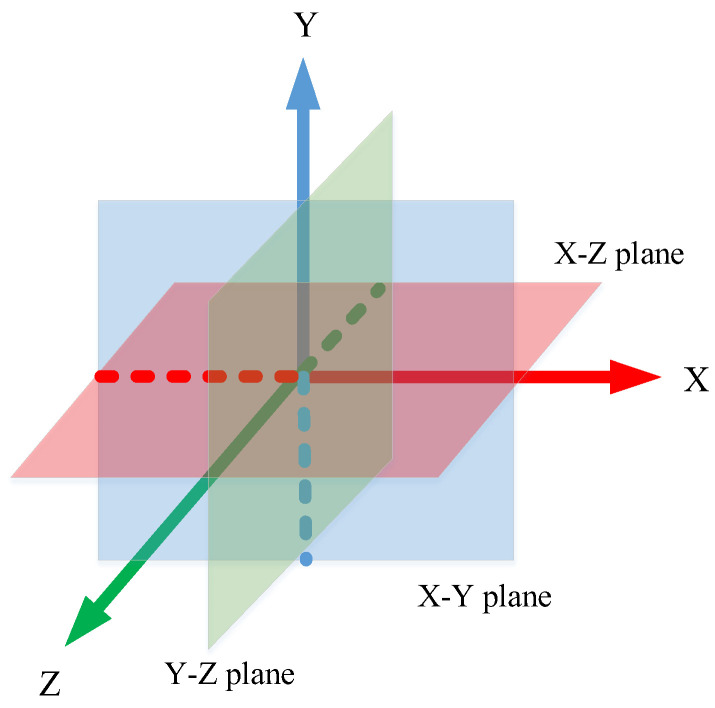 Figure 2
Figure 2 Figure 3
Figure 3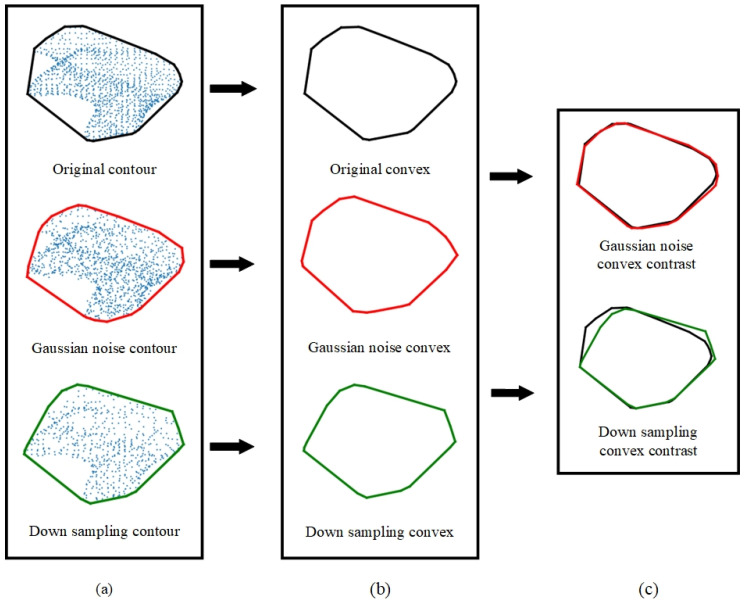 Figure 4
Figure 4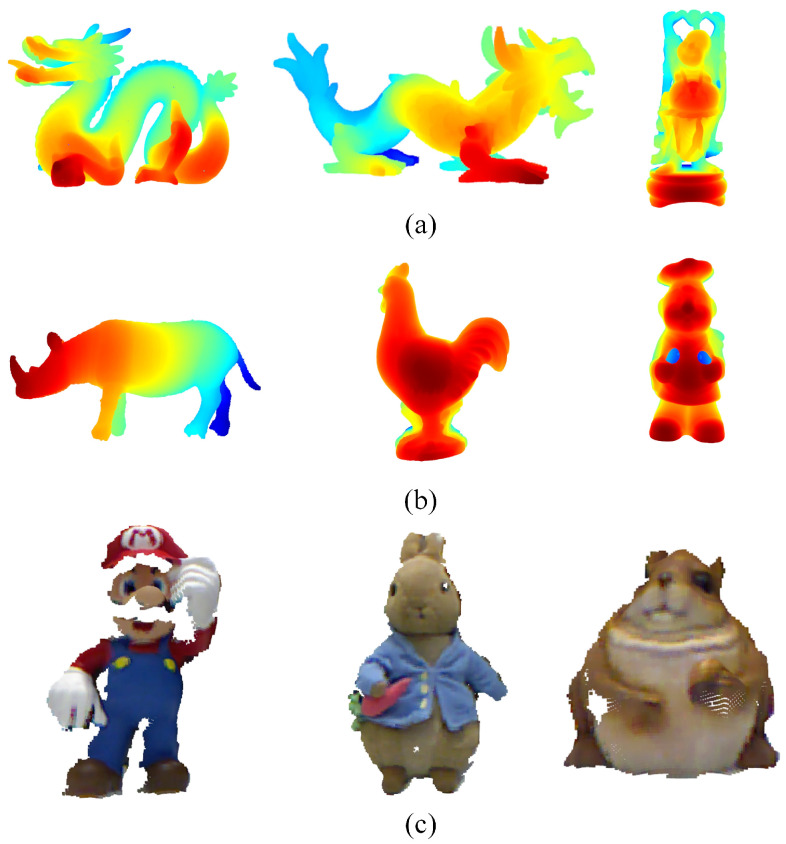 Figure 5
Figure 5 Figure 6
Figure 6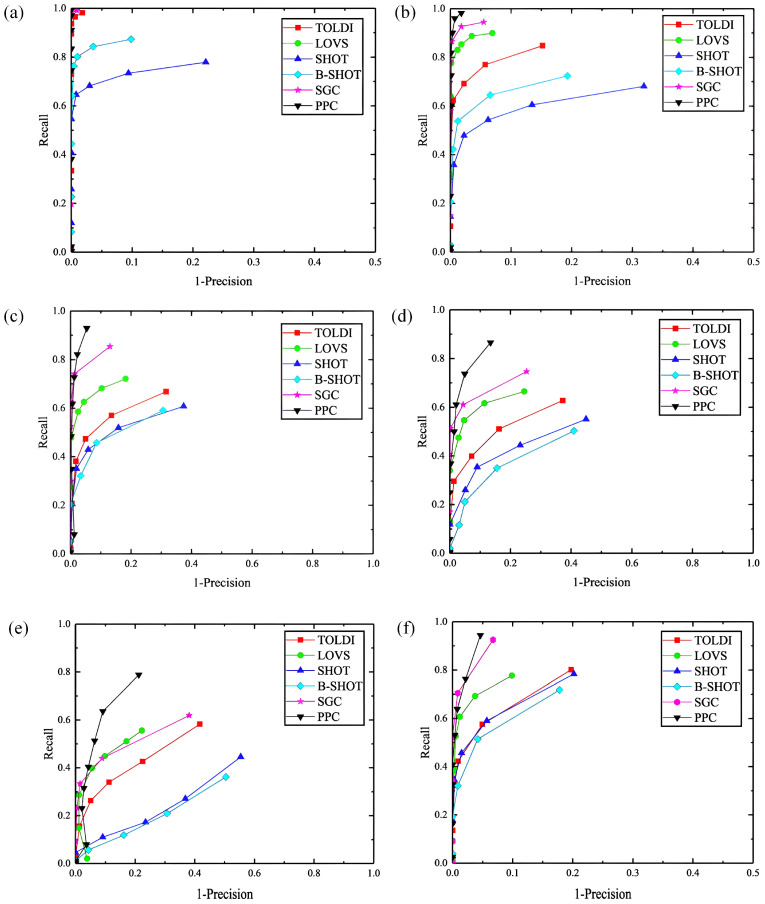 Figure 7
Figure 7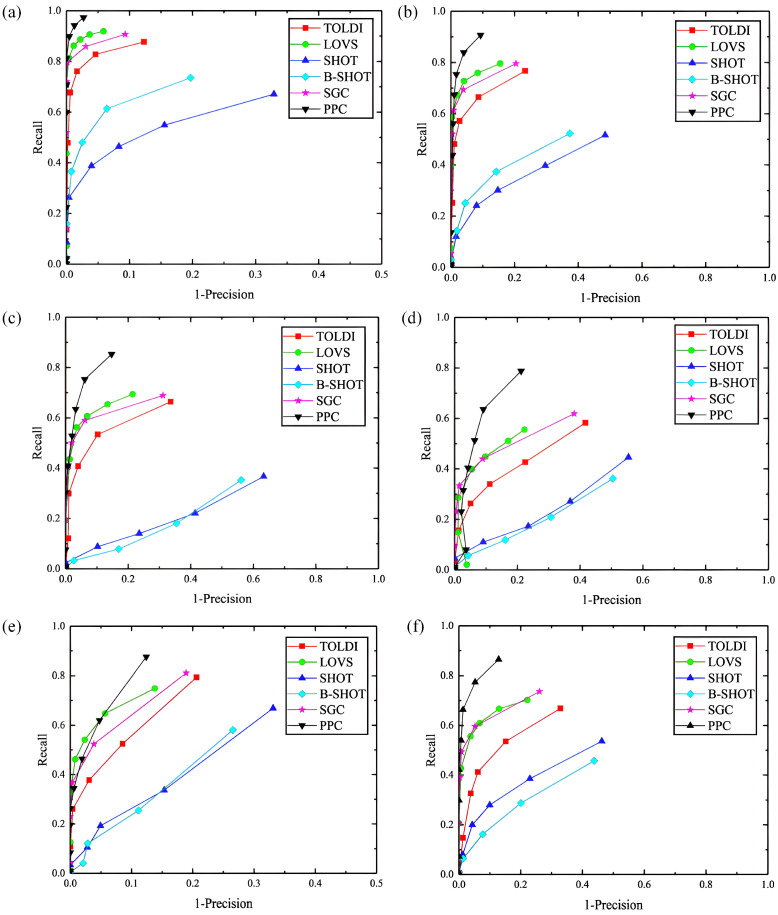 Figure 8
Figure 8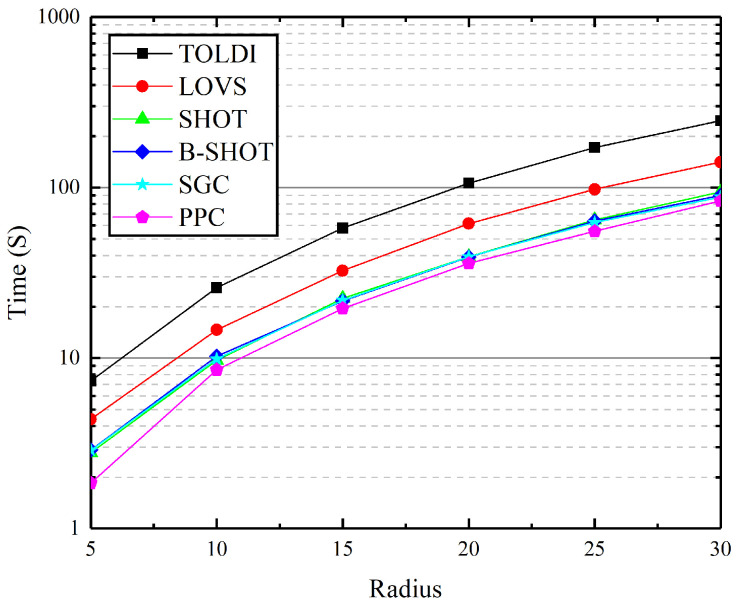 Figure 9
Figure 9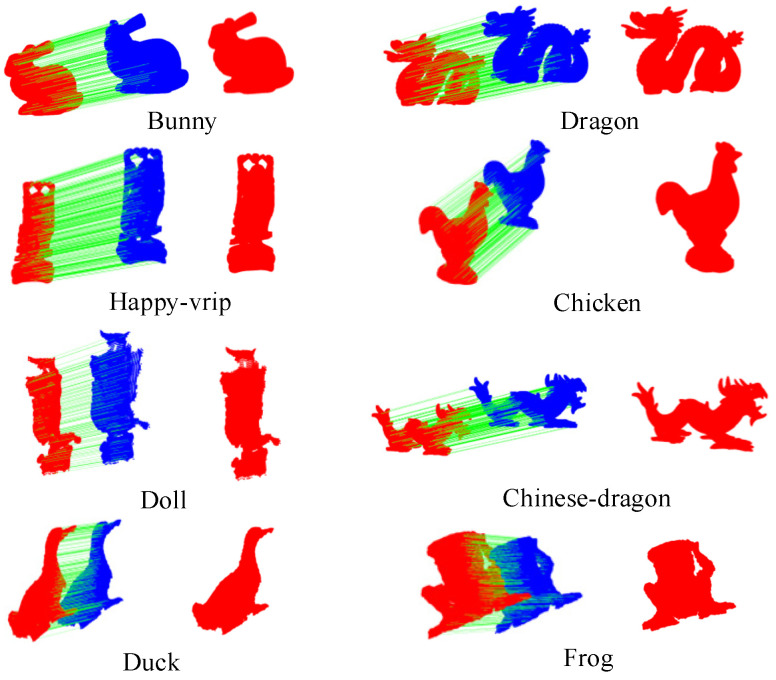 Figure 10
Figure 10Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotics and Sensor-Based Localization · 3D Surveying and Cultural Heritage · Remote Sensing and LiDAR Applications