Assessment of the Suitability of Selected Linear Actuators for the Implementation of the Load-Adaptive Biological Principle of Redundant Motion Generation
Marcel Bartz, Michael Jüttner, Fabian Halmos, Elias Uhlich, Max Klein, Patricia Drumm, Erkan Dreßler, Sina Martin, Jonas Walter, Jörg Franke, Sandro Wartzack

TL;DR
This paper explores how linear actuators, especially ropes, can mimic the energy-efficient behavior of human muscles in technical systems like robotics.
Contribution
The study evaluates and compares linear actuators for their ability to replicate load-adaptive biological muscle behavior, identifying ropes as a promising solution.
Findings
Ropes are currently the most suitable linear actuators for mimicking load-adaptive biological muscle behavior.
Ropes show good mechanical and control behavior, making them advantageous for adaptive systems.
Future research should focus on how ropes can be applied in technical systems to achieve lightweight, energy-efficient designs.
Abstract
The load-adaptive behavior of the muscles in the human musculoskeletal system offers great potential for minimizing resource and energy requirements in many technical systems, especially in drive technology and robotics. However, the lack of knowledge about suitable technical linear actuators that can reproduce the load-adaptive behavior of biological muscles in technology is a major reason for the lack of successful implementation of this biological principle. In this paper, therefore, the different types of linear actuators are investigated. The focus is particularly on artificial muscles and rope pulls. The study is based on literature, on the one hand, and on two physical demonstrators in the form of articulated robots, on the other hand. The studies show that ropes are currently the best way to imitate the load-adaptive behavior of the biological model in technology. This is…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
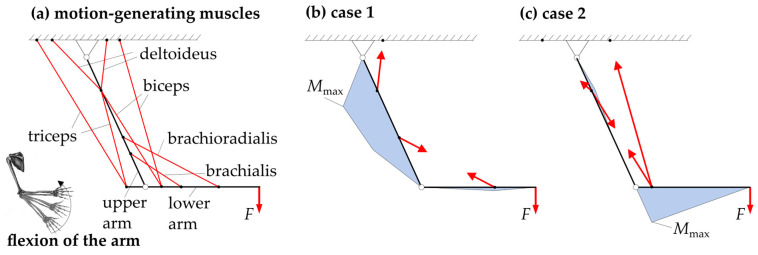 Figure 1
Figure 1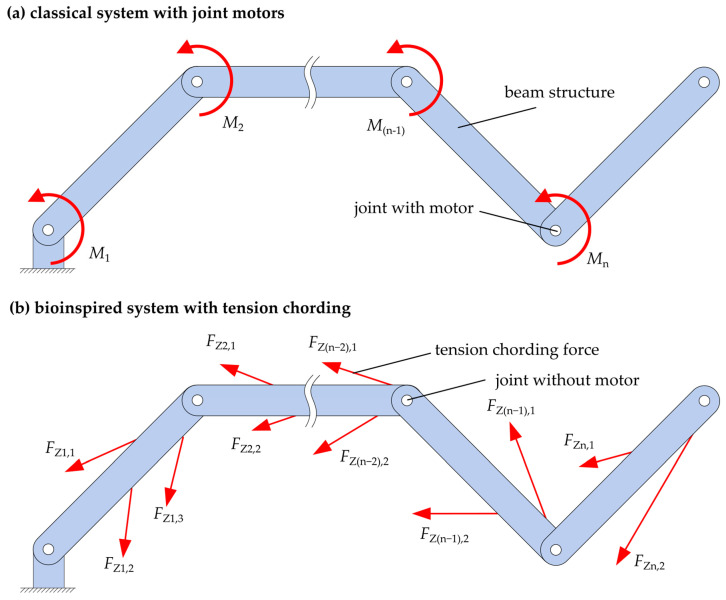 Figure 2
Figure 2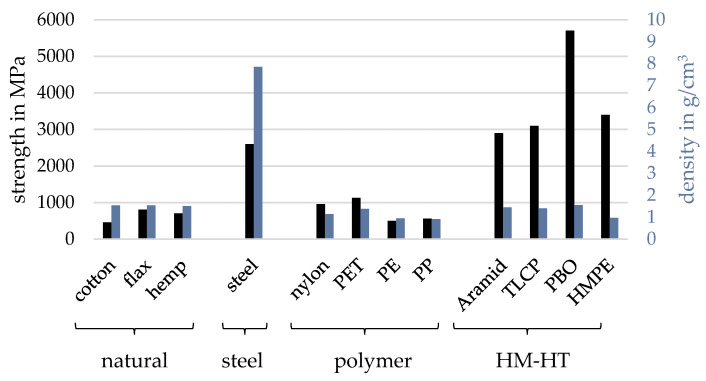 Figure 3
Figure 3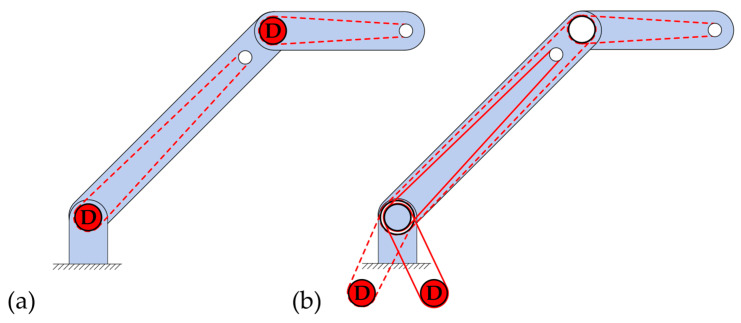 Figure 4
Figure 4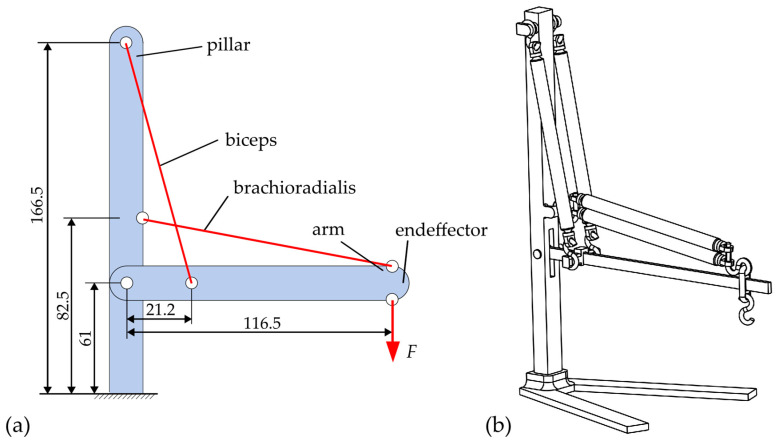 Figure 5
Figure 5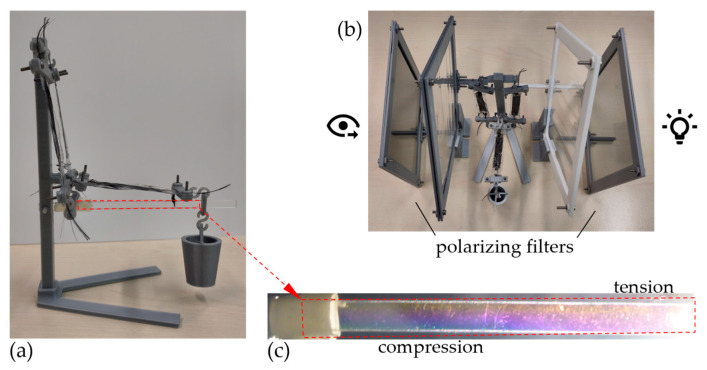 Figure 6
Figure 6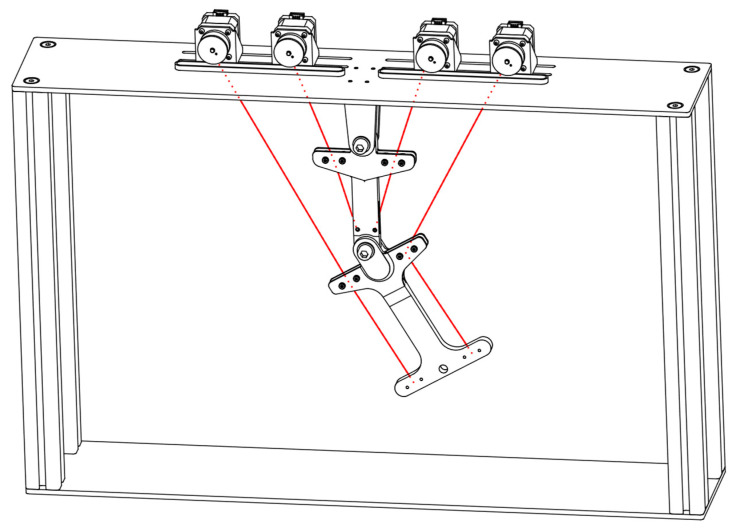 Figure 7
Figure 7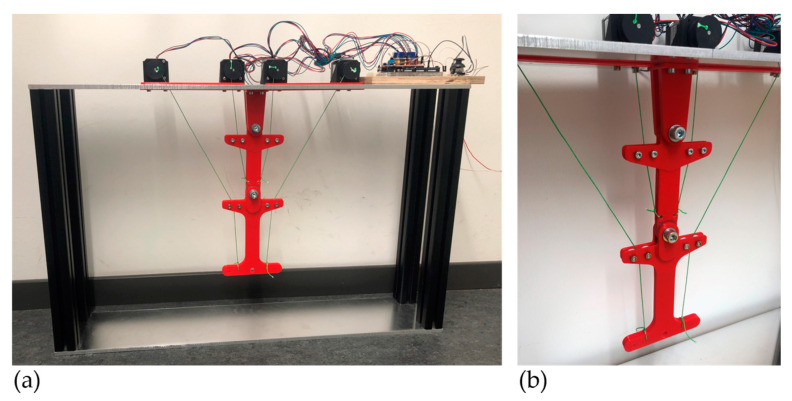 Figure 8
Figure 8Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsAdvanced Sensor and Energy Harvesting Materials · Prosthetics and Rehabilitation Robotics · Muscle activation and electromyography studies