Filtering Organized 3D Point Clouds for Bin Picking Applications
Marek Franaszek, Prem Rachakonda, Kamel S. Saidi

TL;DR
This paper introduces a new method to filter 3D point clouds for robotic bin-picking tasks, improving performance in cluttered scenes.
Contribution
A novel filtering technique tailored for organized 3D point clouds in bin-picking applications is proposed.
Findings
The new filtering method outperforms generic outlier removal on heavily contaminated datasets.
It was tested on six different bin datasets and showed improved filtering efficacy.
Abstract
In robotic bin-picking applications, autonomous robot action is guided by a perception system integrated with the robot. Unfortunately, many perception systems output data contaminated by spurious points that have no correspondence to the real physical objects. Such spurious points in 3D data are the outliers that may spoil obstacle avoidance planning executed by the robot controller and impede the segmentation of individual parts in the bin. Thus, they need to be removed. Many outlier removal procedures have been proposed that work very well on unorganized 3D point clouds acquired for different, mostly outdoor, scenarios, but these usually do not transfer well to the manufacturing domain. This paper presents a new filtering technique specifically designed to deal with the organized 3D point cloud acquired from a cluttered scene, which is typical for a bin-picking task. The new…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
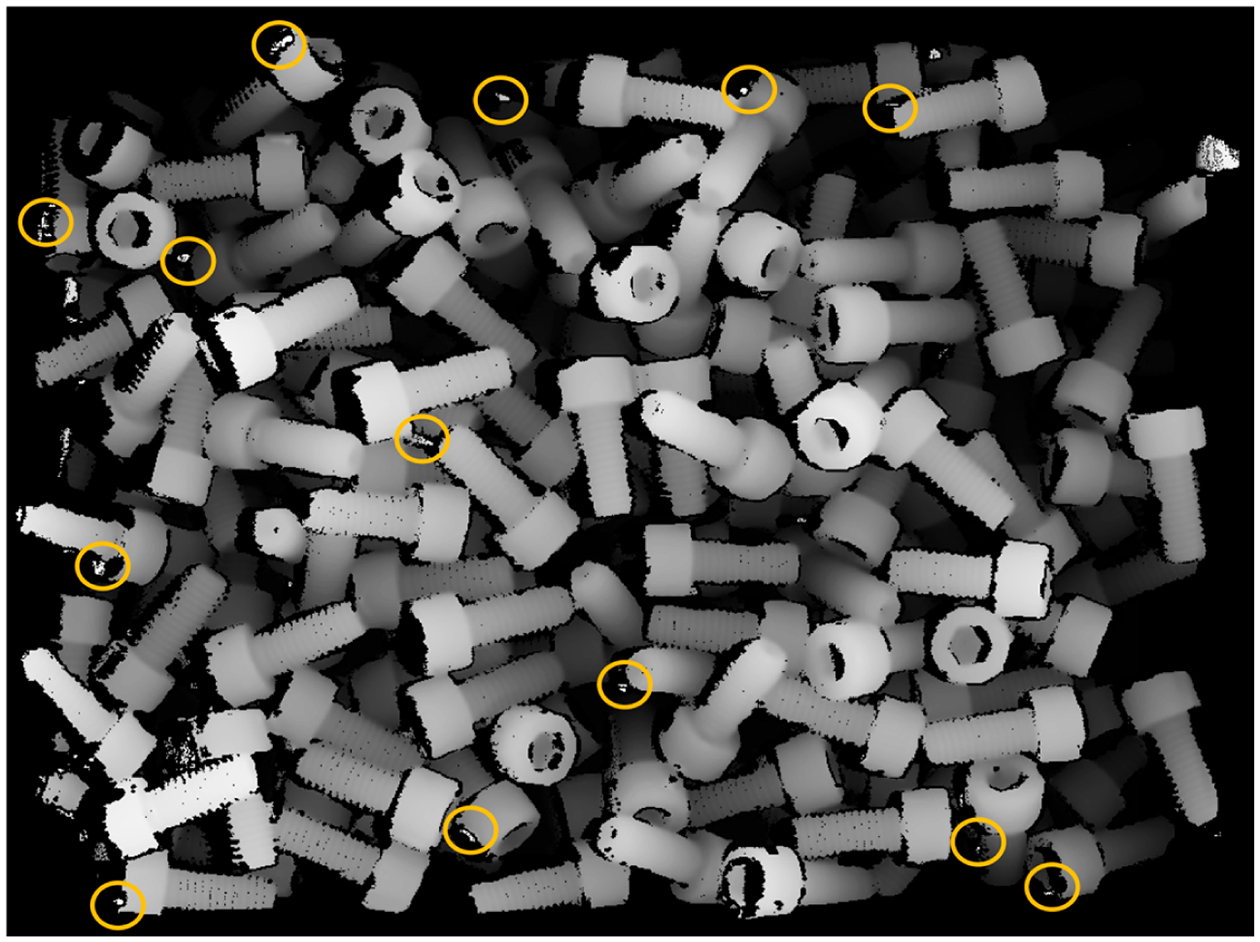 Figure 1
Figure 1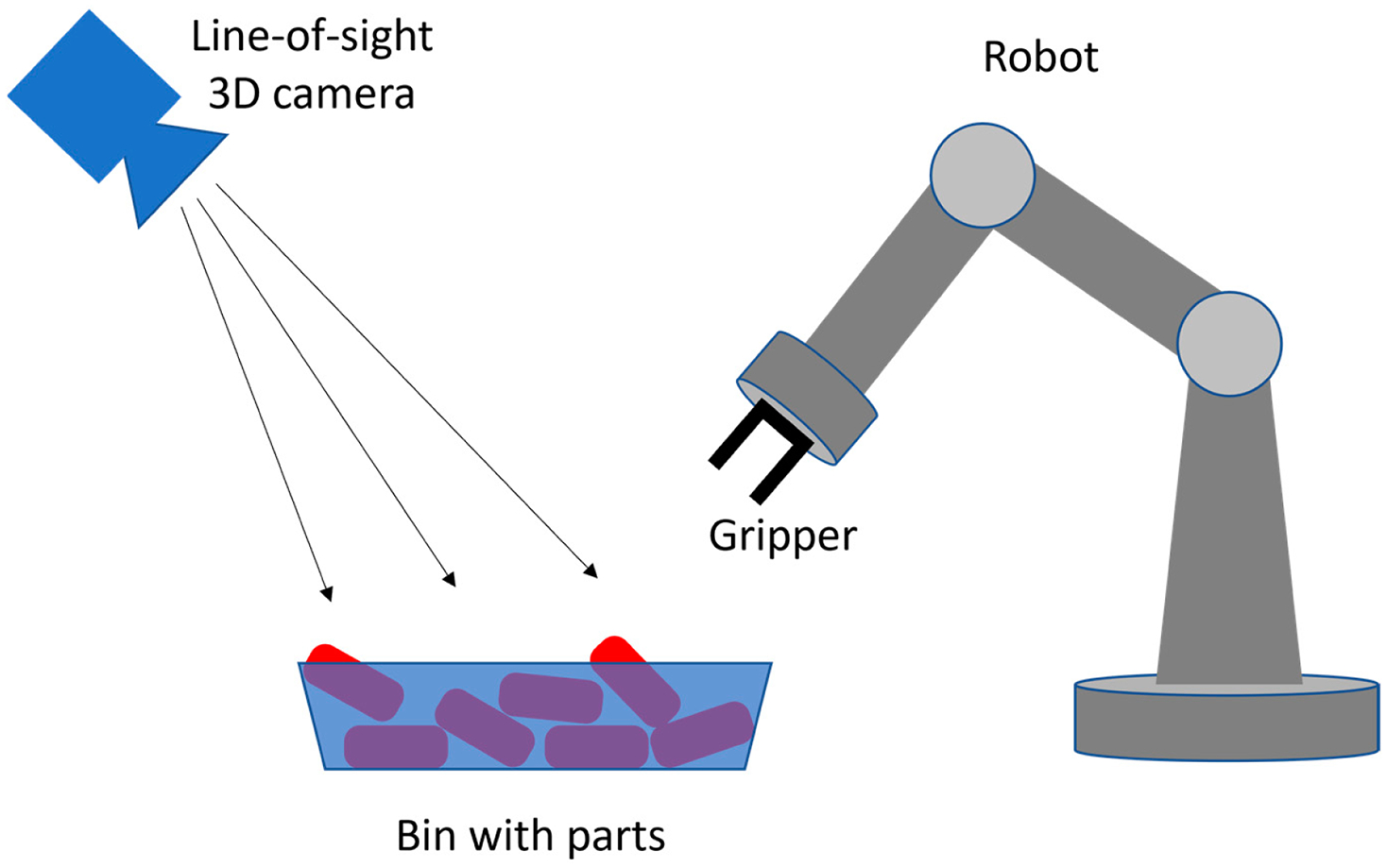 Figure 2
Figure 2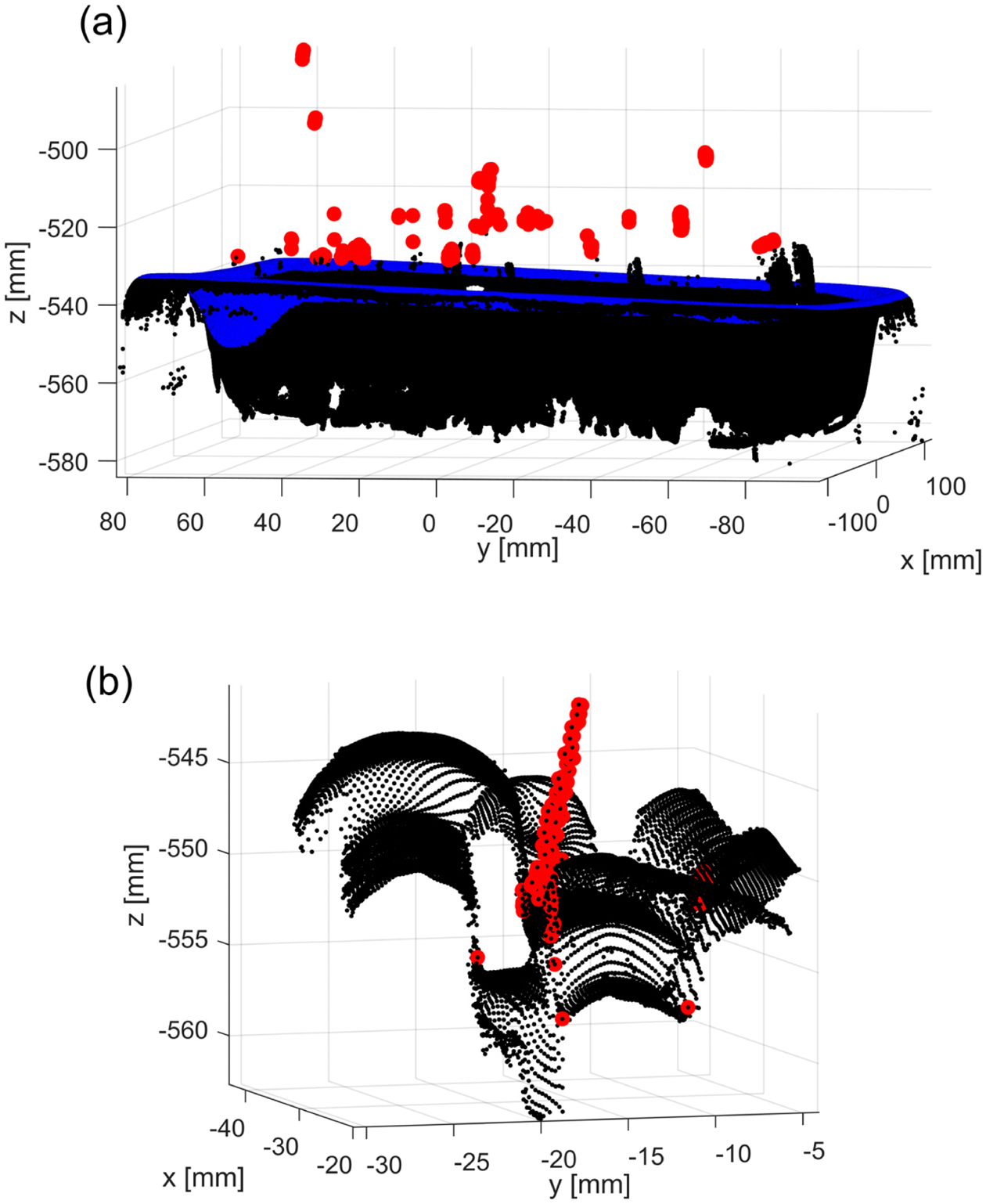 Figure 3
Figure 3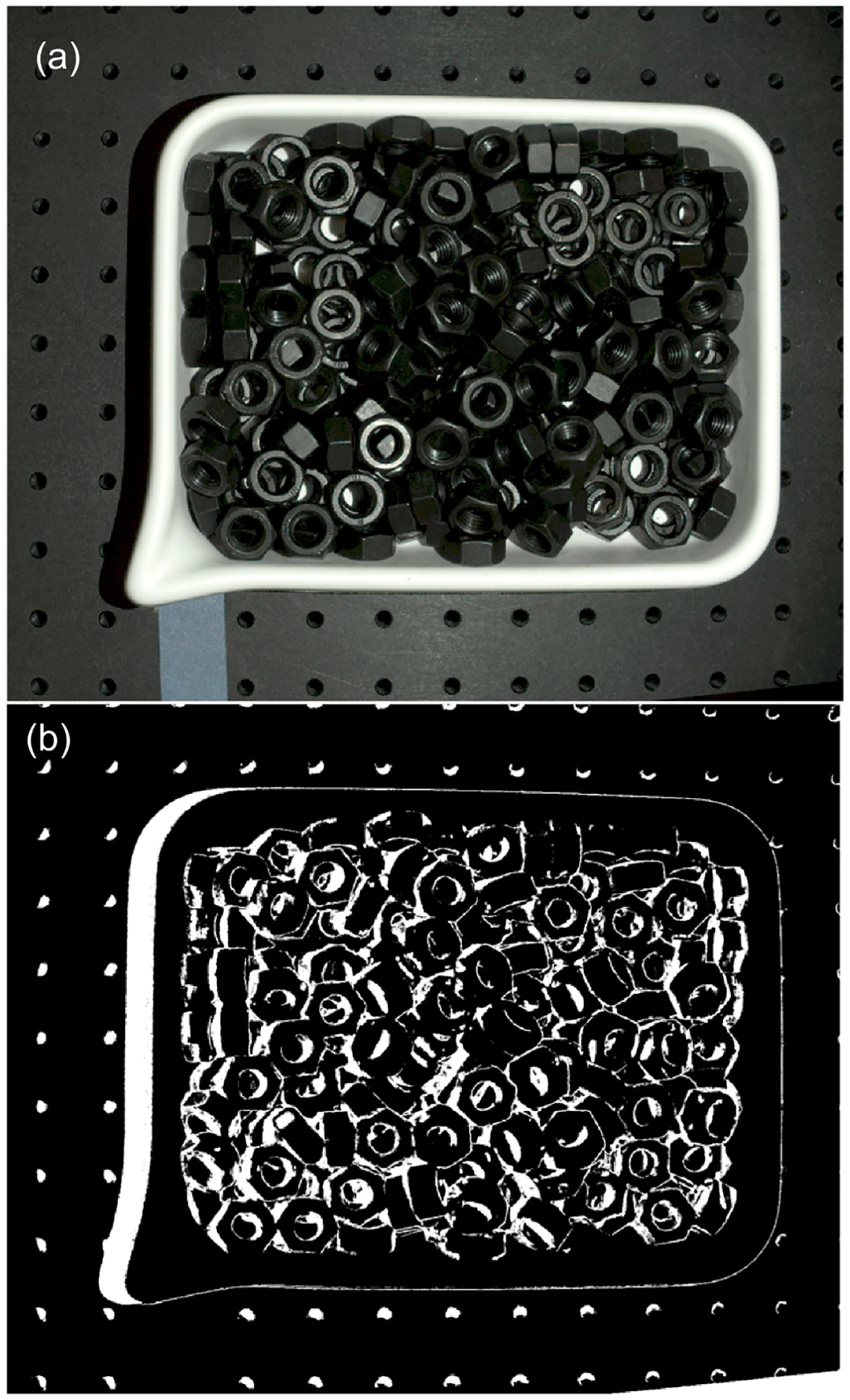 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8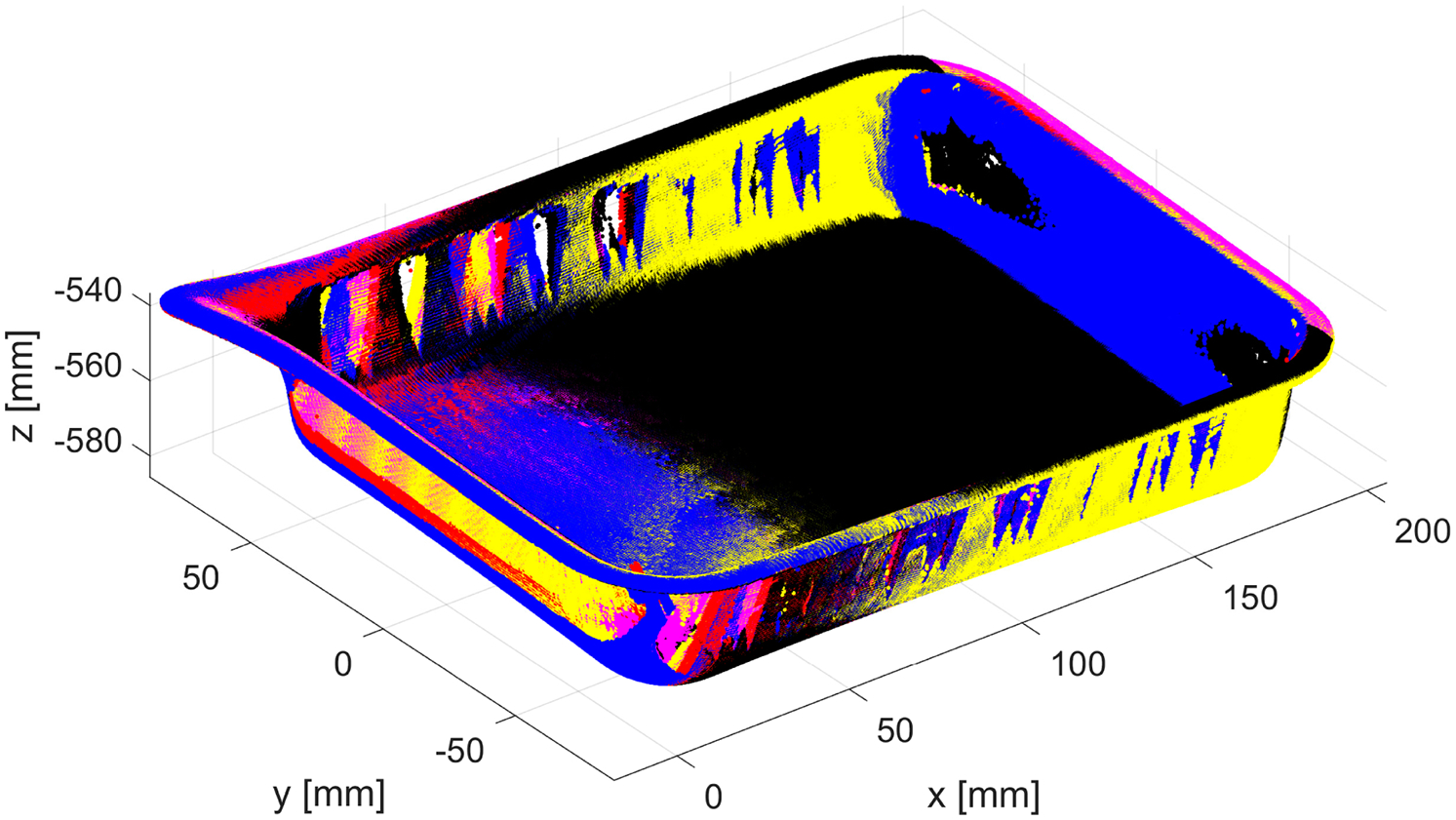 Figure 9
Figure 9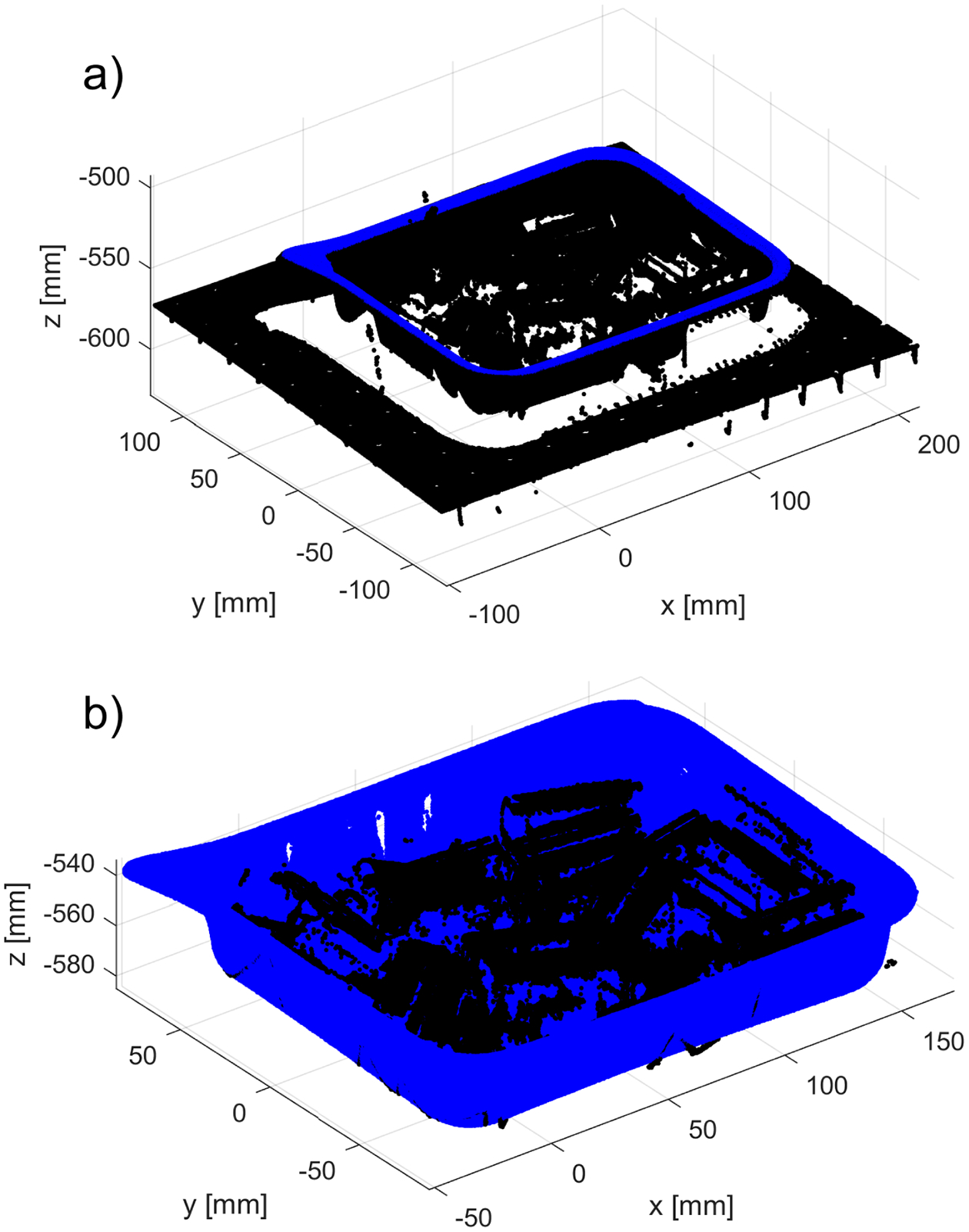 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12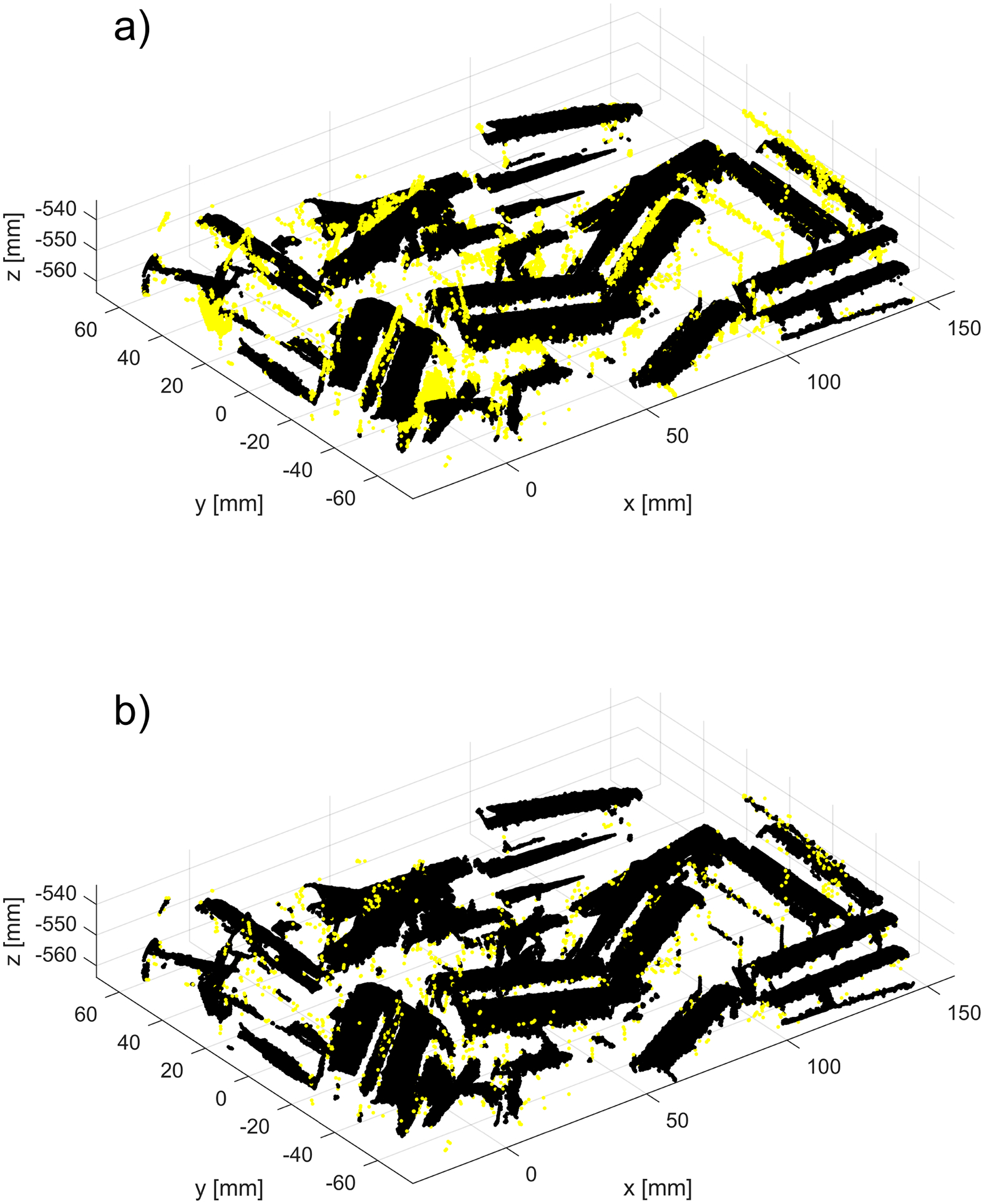 Figure 13
Figure 13 Figure 14
Figure 14 Figure 15
Figure 15 Figure 16
Figure 16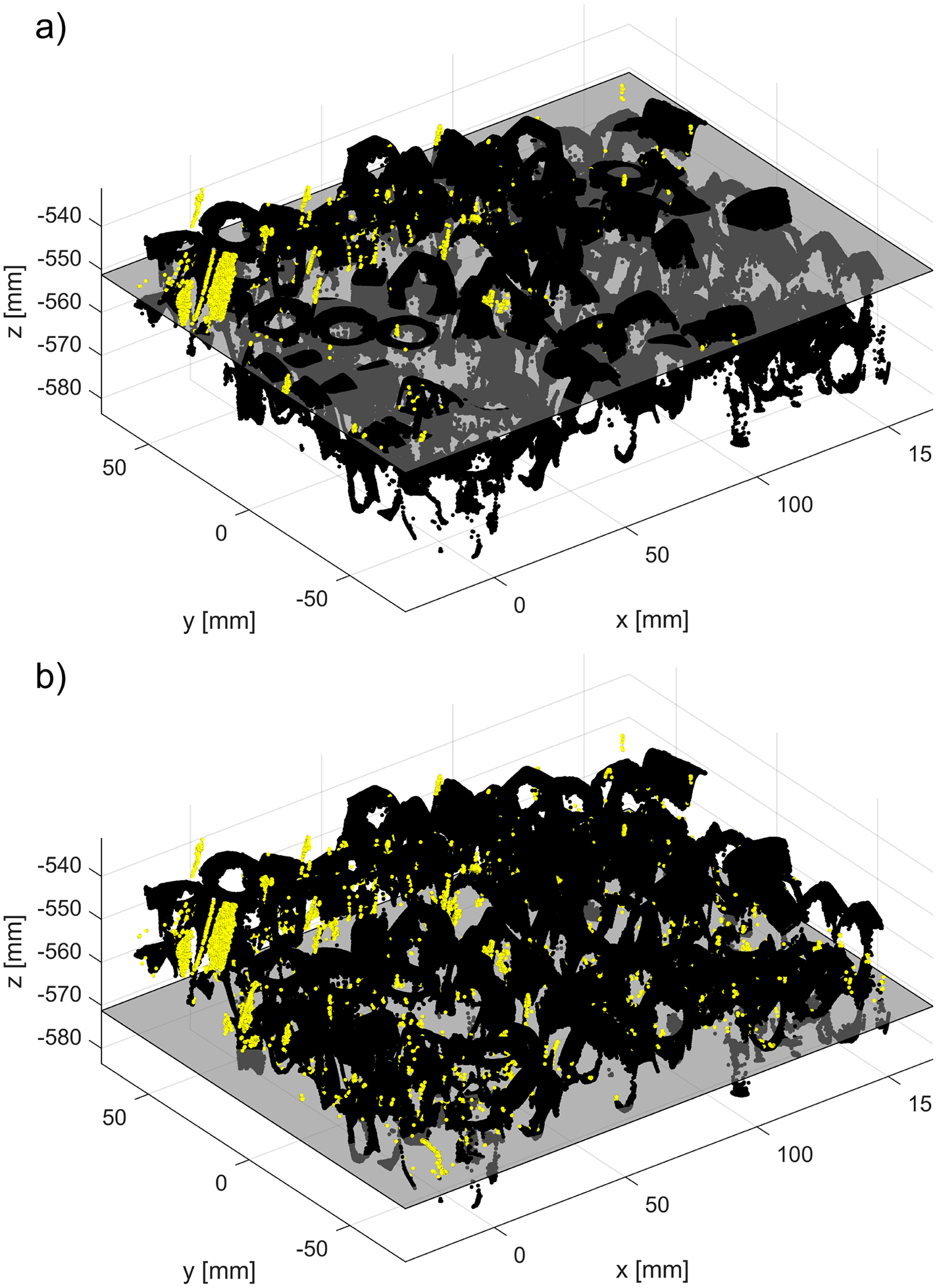 Figure 17
Figure 17 Figure 18
Figure 18 Figure 19
Figure 19 Figure 20
Figure 20 Figure 21
Figure 21Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsIndustrial Vision Systems and Defect Detection · Image and Object Detection Techniques · 3D Surveying and Cultural Heritage