High Precision Positioning and Rotation Angle Estimation of a Flatbed Truck Based on BDS and Vision
Xinli Yu, Yufei Ren, Xiaoxv Yin, Deqiang Meng, Haikuan Zhang

TL;DR
This paper presents a method using BDS and vision to precisely locate and estimate the rotation angle of flatbed trucks for automated forklift loading.
Contribution
A novel method combining BDS and vision for high-precision flatbed truck positioning and rotation angle estimation.
Findings
Endpoint positioning error was less than 3 cm.
Rotation angle estimation error was less than 0.3°.
Abstract
Centimeter-level localization and precise rotation angle estimation for flatbed trucks pose significant challenges in unmanned forklift automated loading scenarios. To address this issue, the study proposed a method for high-precision positioning and rotation angle estimation of flatbed trucks using the BeiDou Navigation Satellite System (BDS) and vision technology. First, an unmanned forklift equipped with a Time-of-Flight (ToF) camera and a dual-antenna mobile receiver for BDS positioning collected depth images and localization data near the front and rear endpoints of the flatbed. The Deep Dual-Resolution Network-23-slim (DDRNet-23-slim) model was used to segment the flatbed from the depth image and extract the straight lines at the edges of the flatbed using the Hough transform. The algorithm then computed the set of intersection points of the lines. A neighborhood feature vector…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
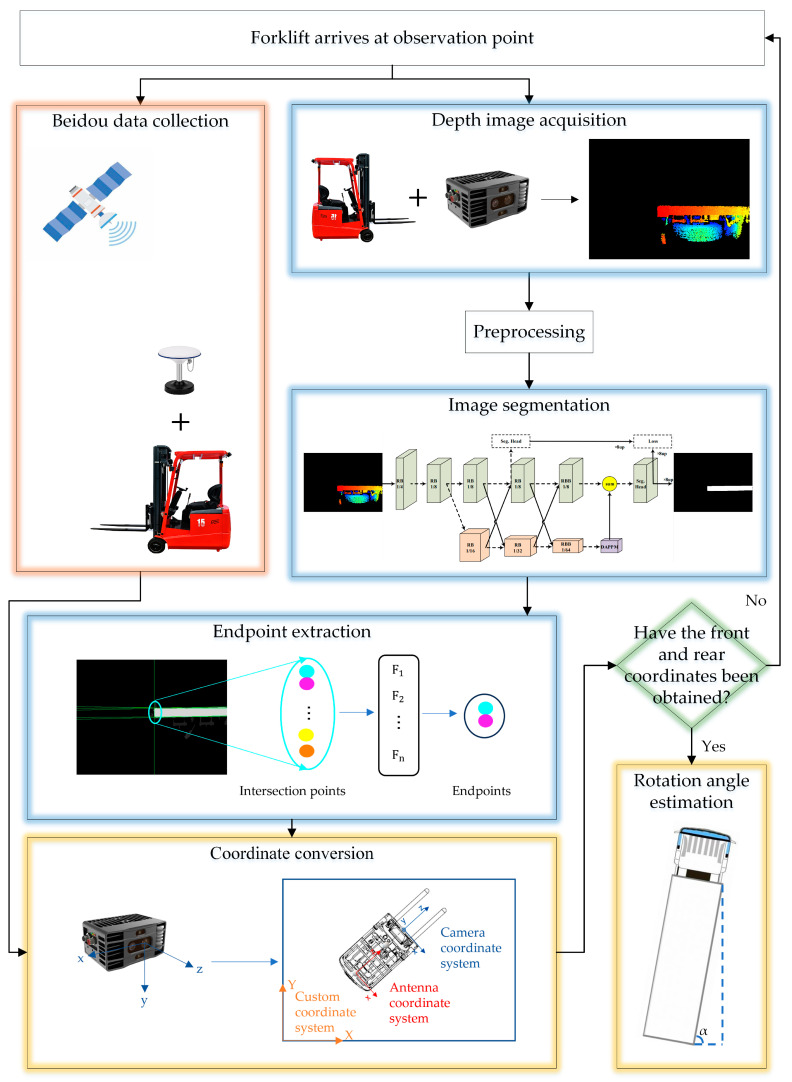 Figure 1
Figure 1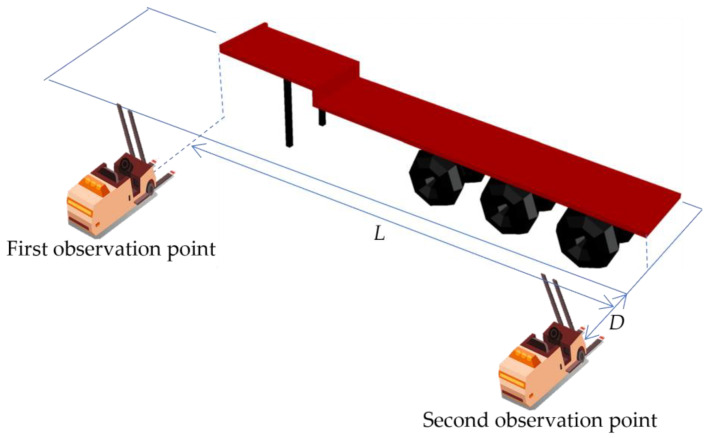 Figure 2
Figure 2 Figure 3
Figure 3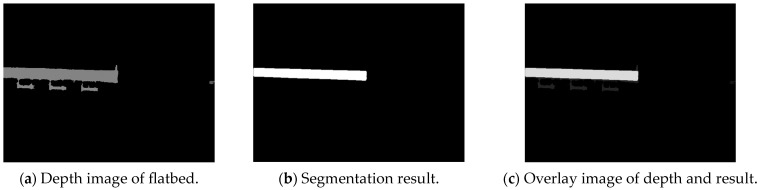 Figure 4
Figure 4 Figure 5
Figure 5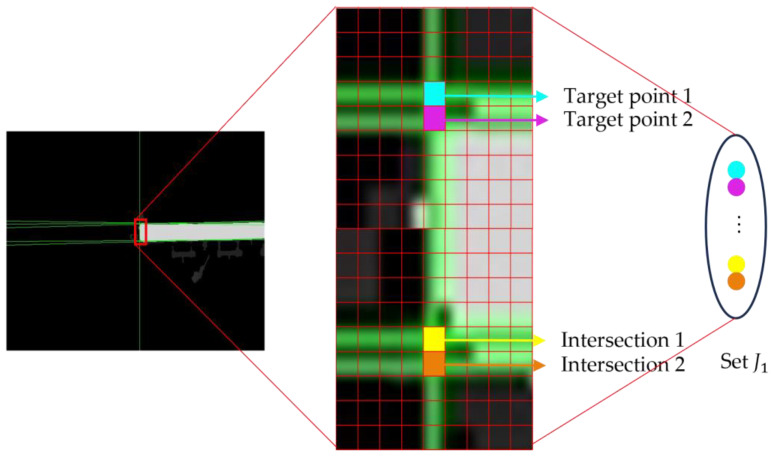 Figure 6
Figure 6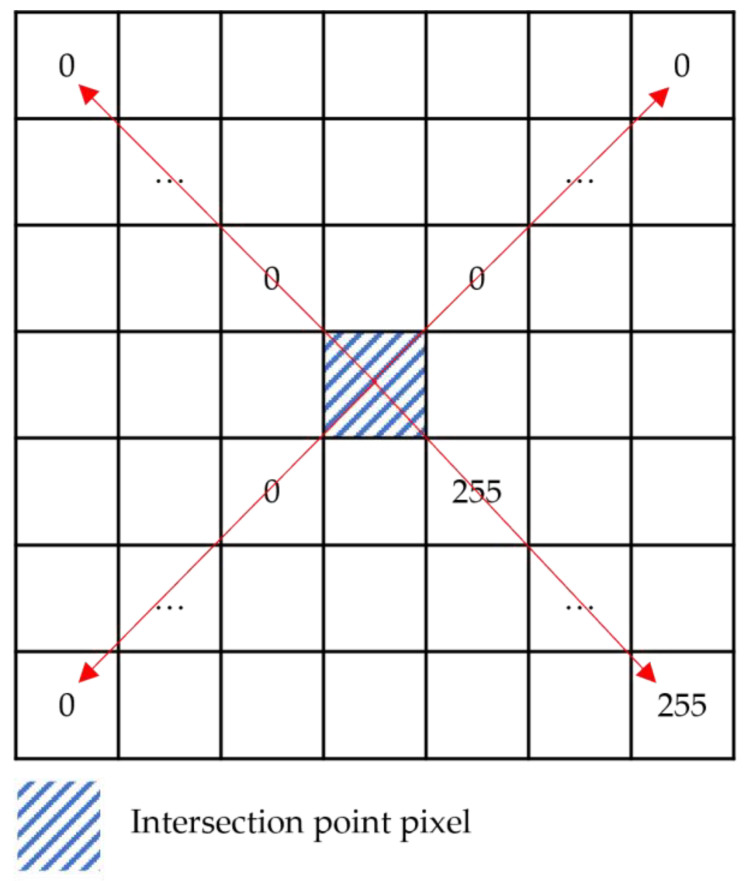 Figure 7
Figure 7 Figure 8
Figure 8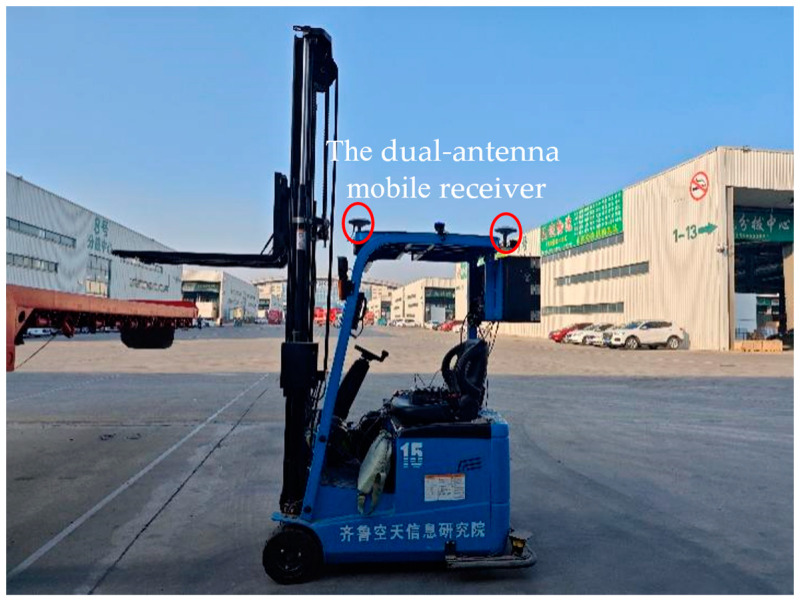 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13 Figure 14
Figure 14 Figure 15
Figure 15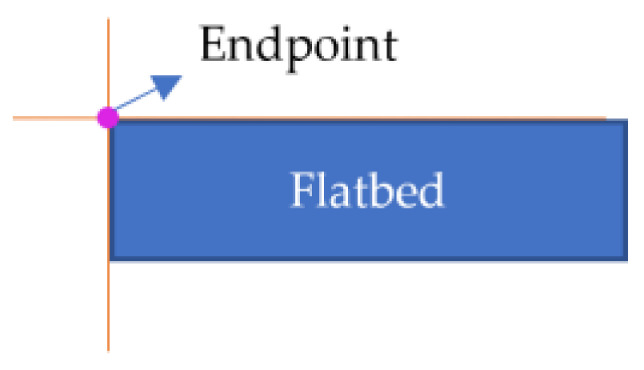 Figure 16
Figure 16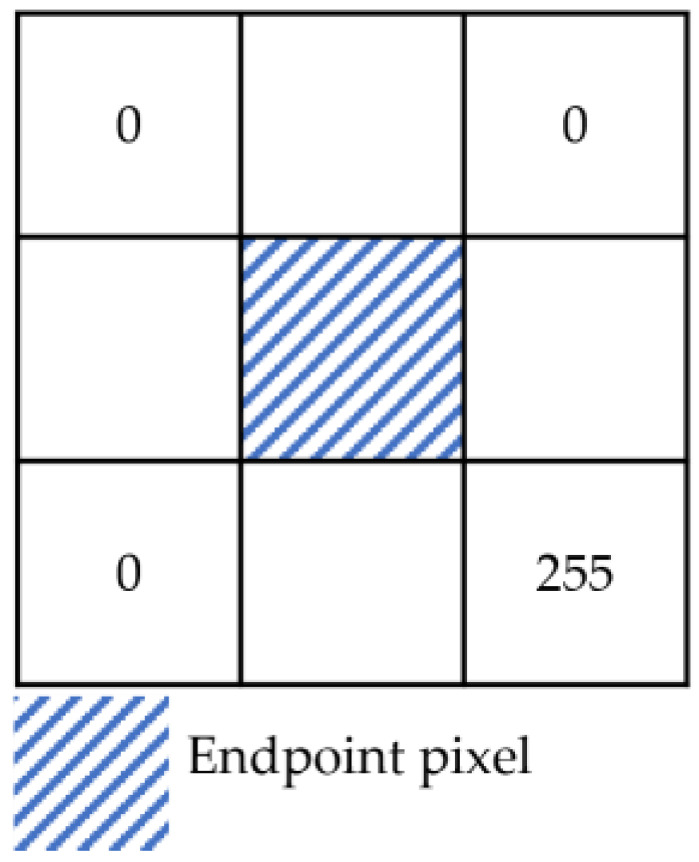 Figure 17
Figure 17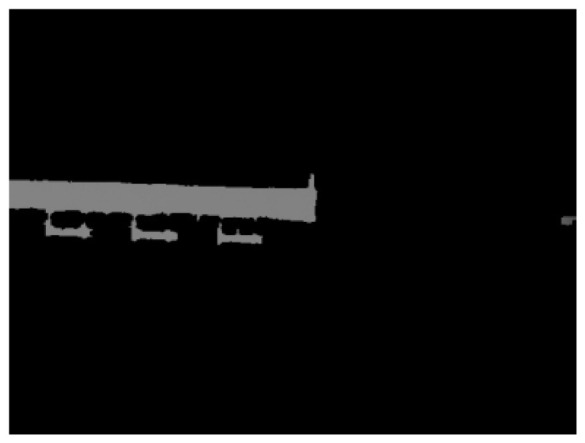 Figure 18
Figure 18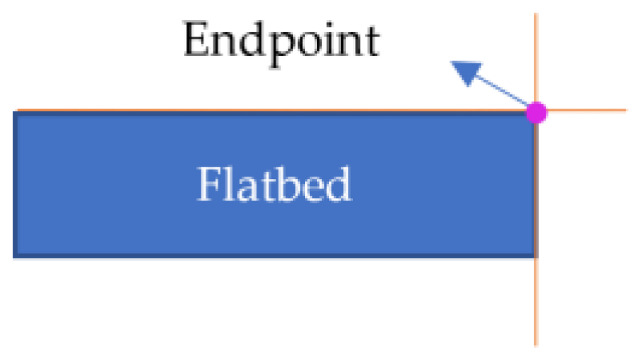 Figure 19
Figure 19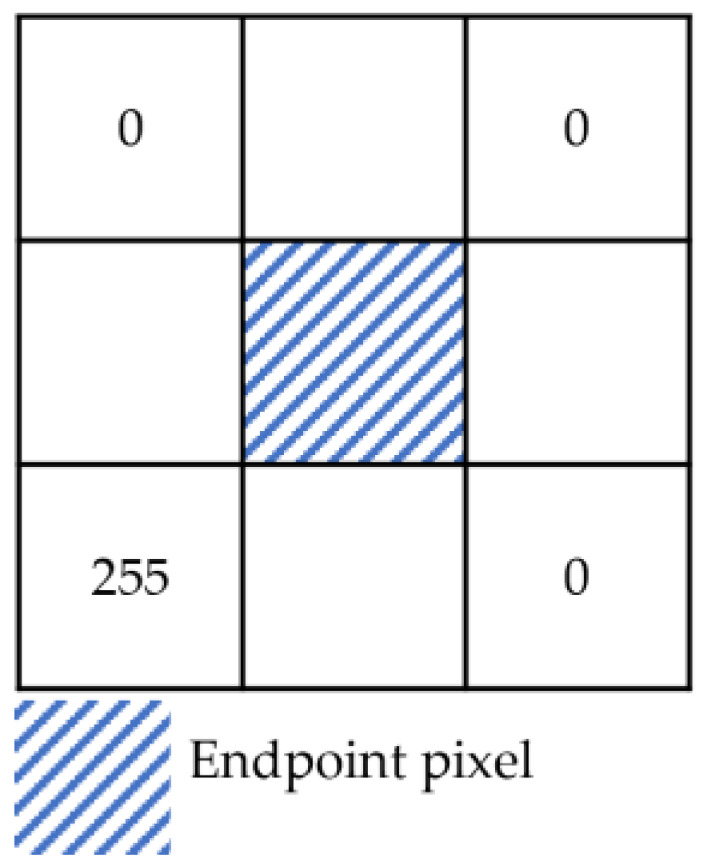 Figure 20
Figure 20 Figure 21
Figure 21 Figure 22
Figure 22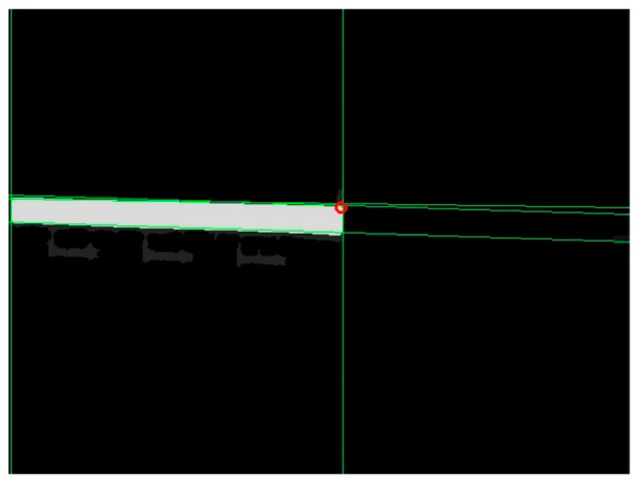 Figure 23
Figure 23 Figure 24
Figure 24 Figure 25
Figure 25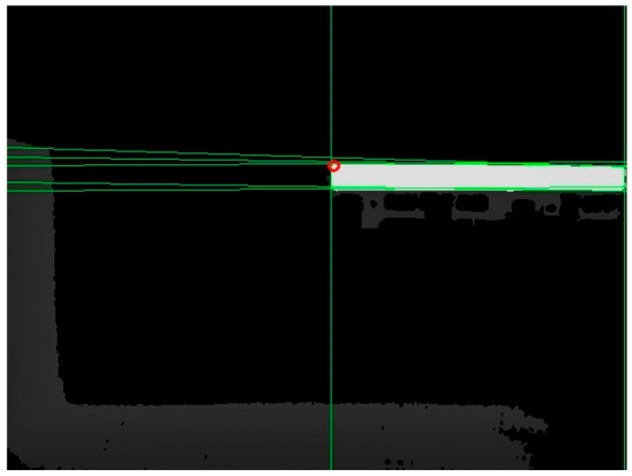 Figure 26
Figure 26 Figure 27
Figure 27 Figure 28
Figure 28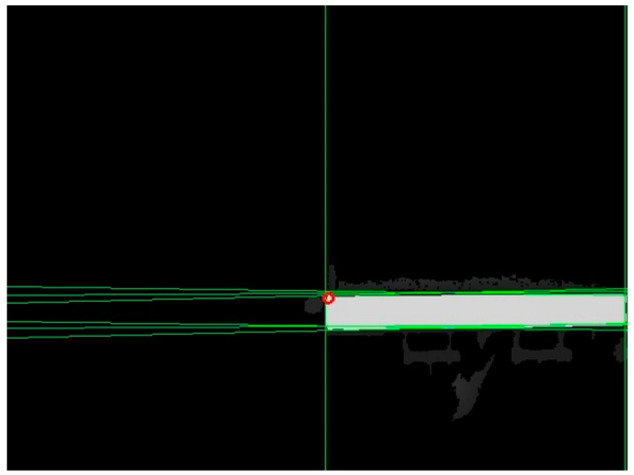 Figure 29
Figure 29 Figure 30
Figure 30 Figure 31
Figure 31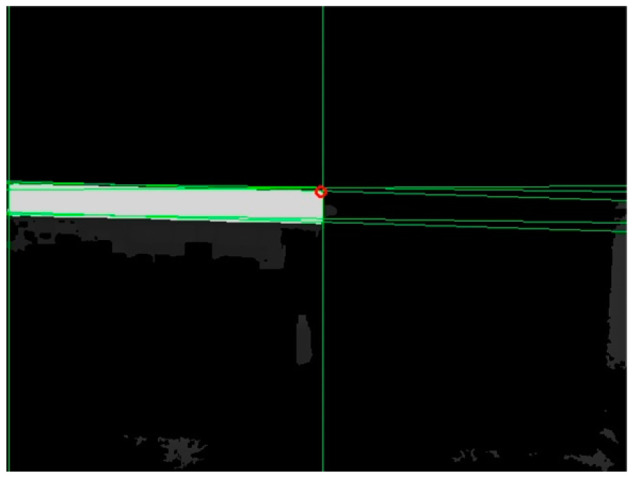 Figure 32
Figure 32Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsImage and Object Detection Techniques · Robotics and Sensor-Based Localization · 3D Surveying and Cultural Heritage