Dislocation force of scleral flange-fixated intraocular lens haptics
Spela Stunf Pukl, Martin Kronschläger, Manuel Ruiss, Stéphane Blouin, Emre Rüştü Akcan, Oliver Findl

TL;DR
This study measures how different materials and tools affect the force needed to dislodge intraocular lens haptics in eye surgery.
Contribution
The study introduces a method to measure dislocation forces based on haptic material, flange size, and needle type in scleral tunnels.
Findings
PVDF haptic flanges with a mushroom-like shape showed higher dislocation forces (1.58 ± 0.68 N) compared to PMMA haptics (0.70 ± 0.14 N) with conic shapes.
Flange size correlated strongly with dislocation force (r = 0.92) when flanges were larger than 384 micrometres.
Forceps-assisted PMMA flanges did not improve dislocation resistance compared to PVDF haptics.
Abstract
To measure the dislocation forces in relation to haptic material, flange size and needle used. Hanusch Hospital, Vienna, Austria. Laboratory Investigation. 30 G (gauge) thin wall and 27 G standard needles were used for a 2 mm tangential scleral tunnel in combination with different PVDF (polyvinylidene fluoride) and PMMA (polymethylmethacrylate haptics). Flanges were created by heating 1 mm of the haptic end, non-forceps assisted in PVDF and forceps assisted in PMMA haptics. The dislocation force was measured in non-preserved cadaver sclera using a tensiometer device. PVDF flanges achieved were of a mushroom-like shape and PMMA flanges were of a conic shape. For 30 G needle tunnels the dislocation forces for PVDF and PMMA haptic flanges were 1.58 ± 0.68 N (n = 10) and 0.70 ± 0.14 N (n = 9) (p = 0.003) respectively. For 27 G needle tunnels the dislocation forces for PVDF and PMMA…
Click any figure to enlarge with its caption.
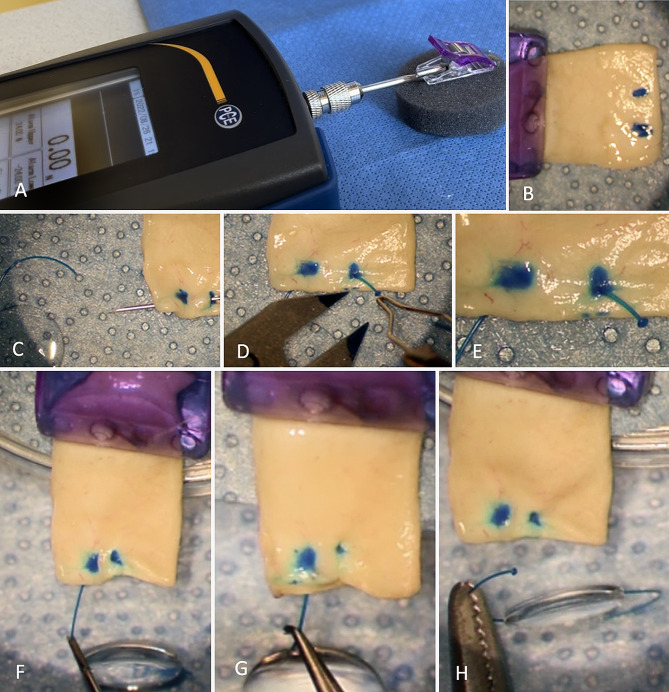 Figure 1
Figure 1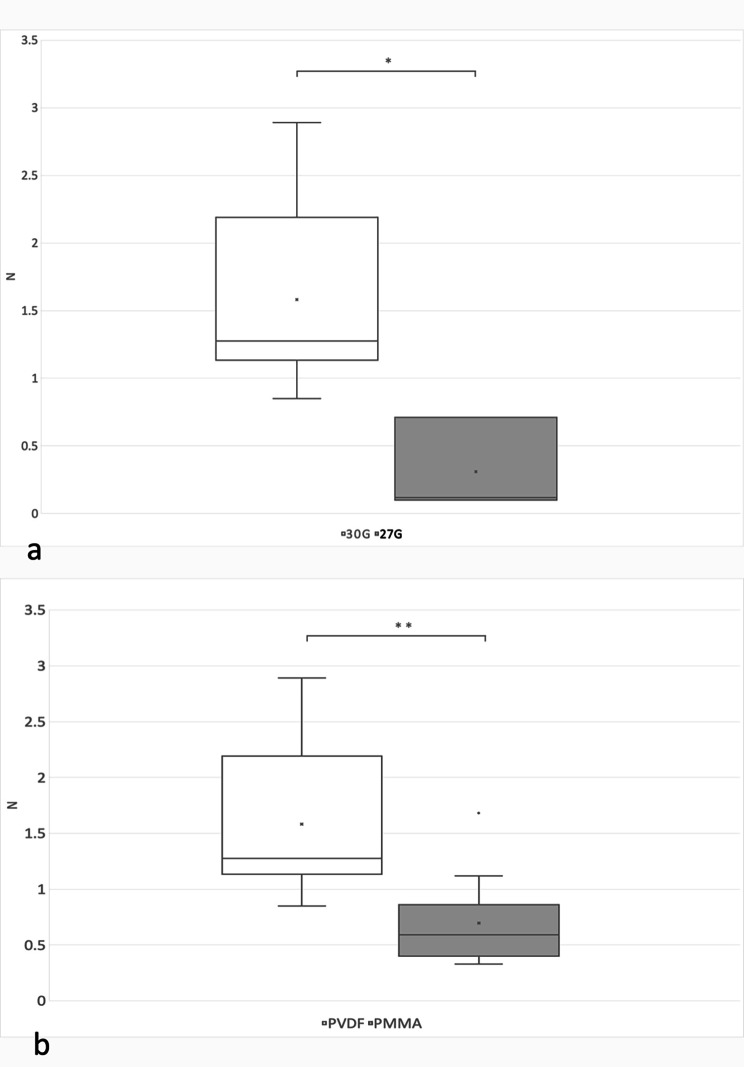 Figure 2
Figure 2 Figure 3
Figure 3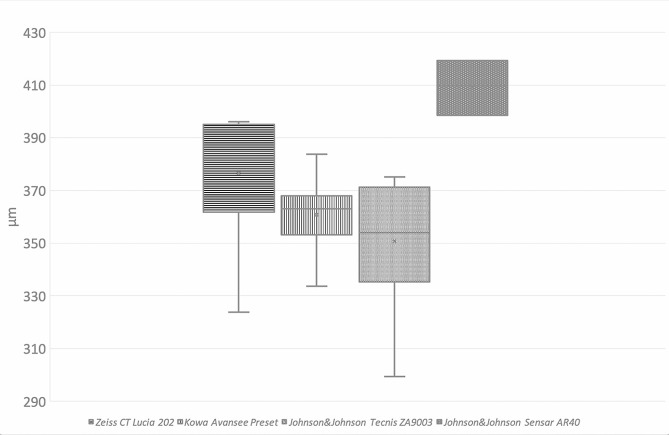 Figure 4
Figure 4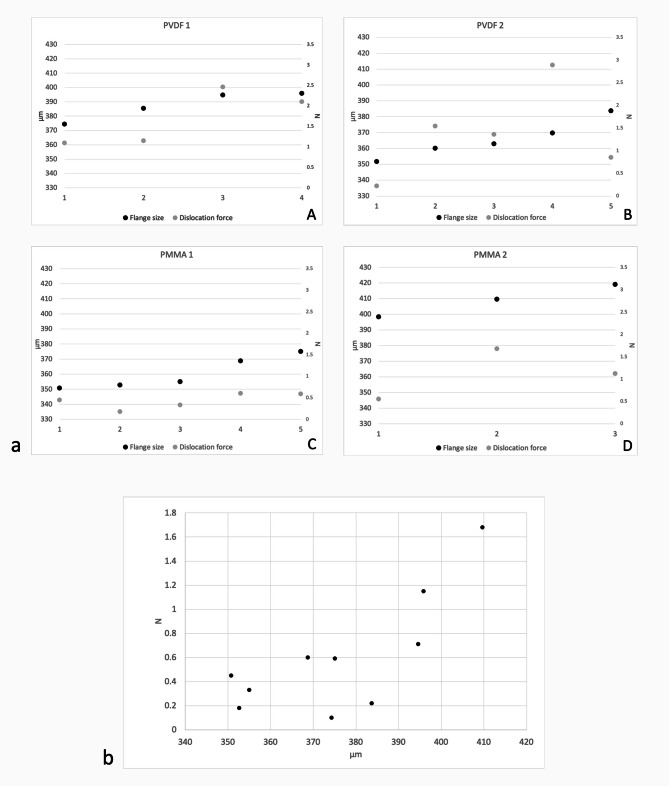 Figure 5
Figure 5Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsTeleoperation and Haptic Systems · Tactile and Sensory Interactions · Geophysics and Sensor Technology