Novel Technique to Increase the Effective Workspace of a Soft Robot
Gerardo I. Pérez-Soto, Karla A. Camarillo-Gómez, Juvenal Rodríguez-Reséndiz, Carlos G. Manríquez-Padilla

TL;DR
This paper introduces a new method to expand the workspace of a soft robot by increasing its equilibrium configurations without adding actuators or changing its structure.
Contribution
A novel technique is proposed to increase the workspace of tensegrity robots by increasing contact points without modifying rigid elements or adding actuators.
Findings
The proposed modification increases the number of geometric equilibrium configurations by 23.369%.
Numerical experiments using ANSYS® R18.2 validated the effectiveness of the new technique.
The method allows for scaling tensegrity robots without altering their fundamental design.
Abstract
This article presents a novel technique for a class 2 tensegrity robot, also classified as a soft robot, to increase workspace by increasing the number of geometric equilibrium configurations of the robot. The proposed modification, unlike the strategies reported in the literature, consists of increasing the number of points where the flexible and rigid elements that make up the robot come into contact without the need to increase the number of actuators, the number of flexible elements, or modify the geometry of the rigid elements. The form-finding methodology combines the basic principles of statics with the direct and inverse kinematic position analysis to determine the number of equilibrium positions of the modified robot. In addition, numerical experiments were carried out using the commercial software ANSYS®, R18.2 based on the finite element theory, to corroborate the results…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
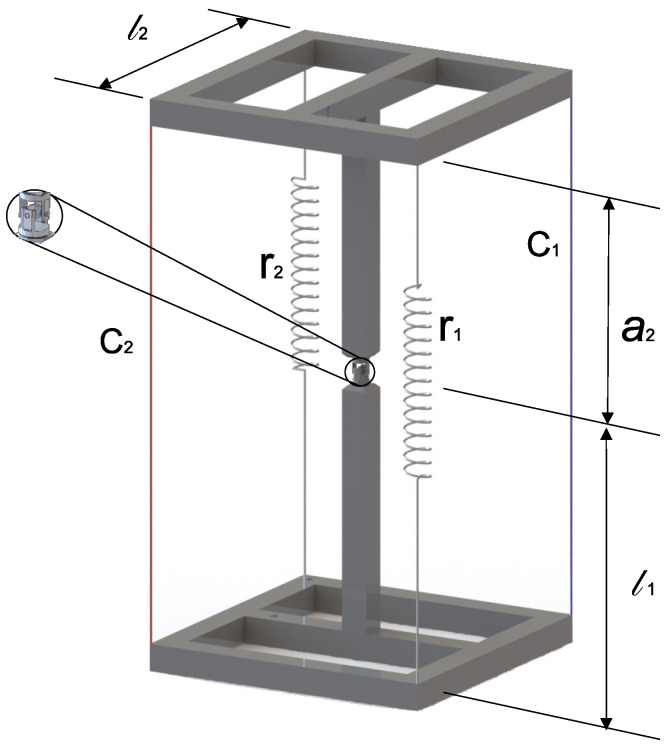 Figure 1
Figure 1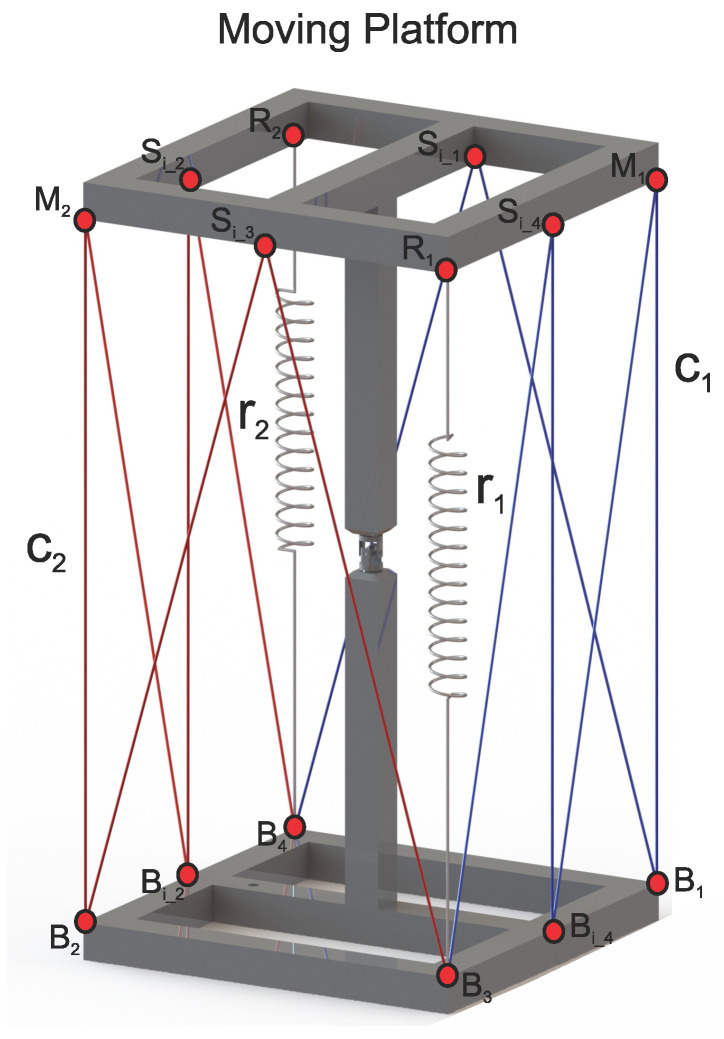 Figure 2
Figure 2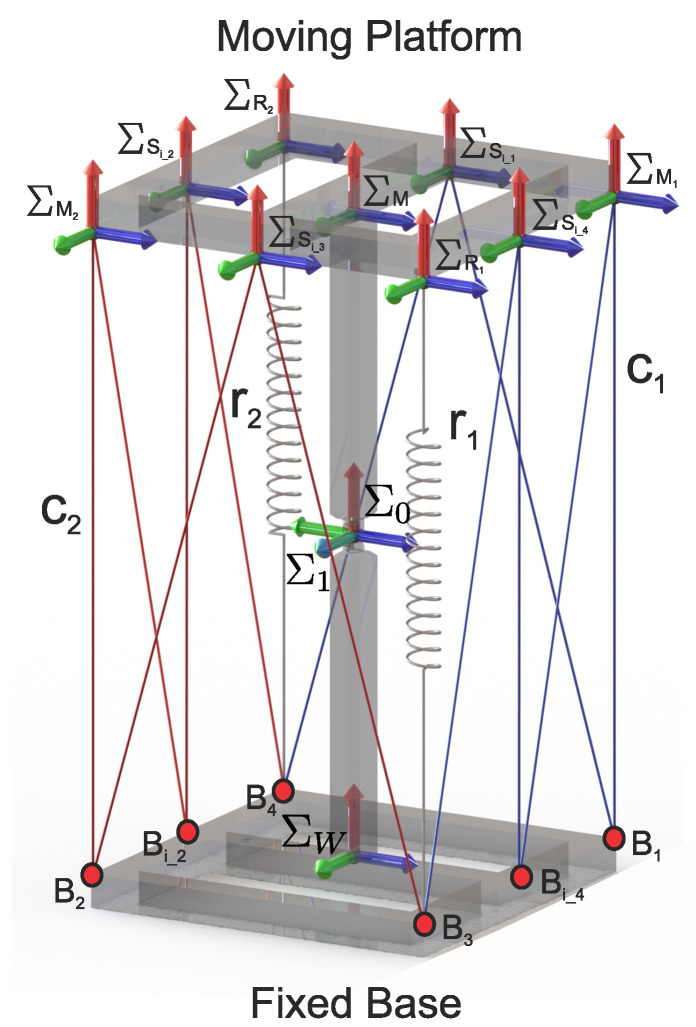 Figure 3
Figure 3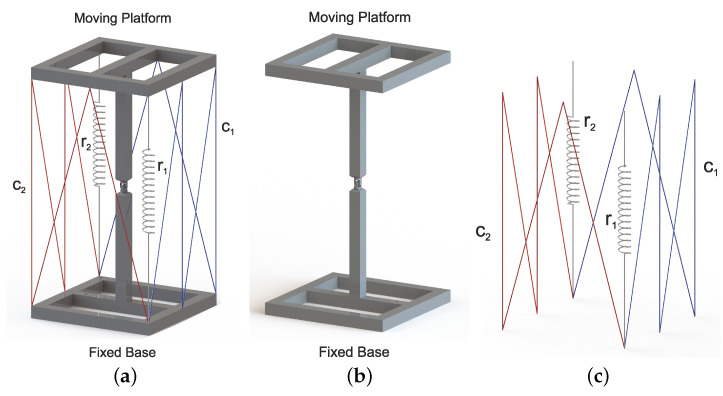 Figure 4
Figure 4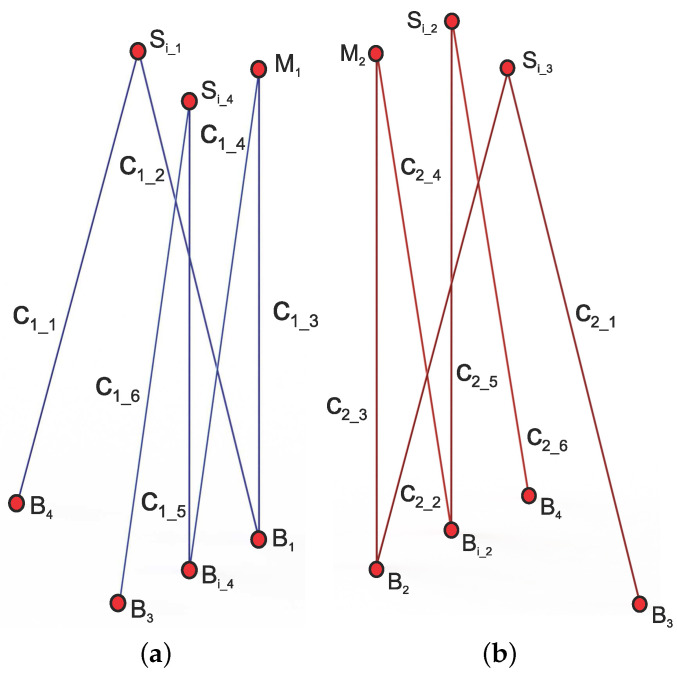 Figure 5
Figure 5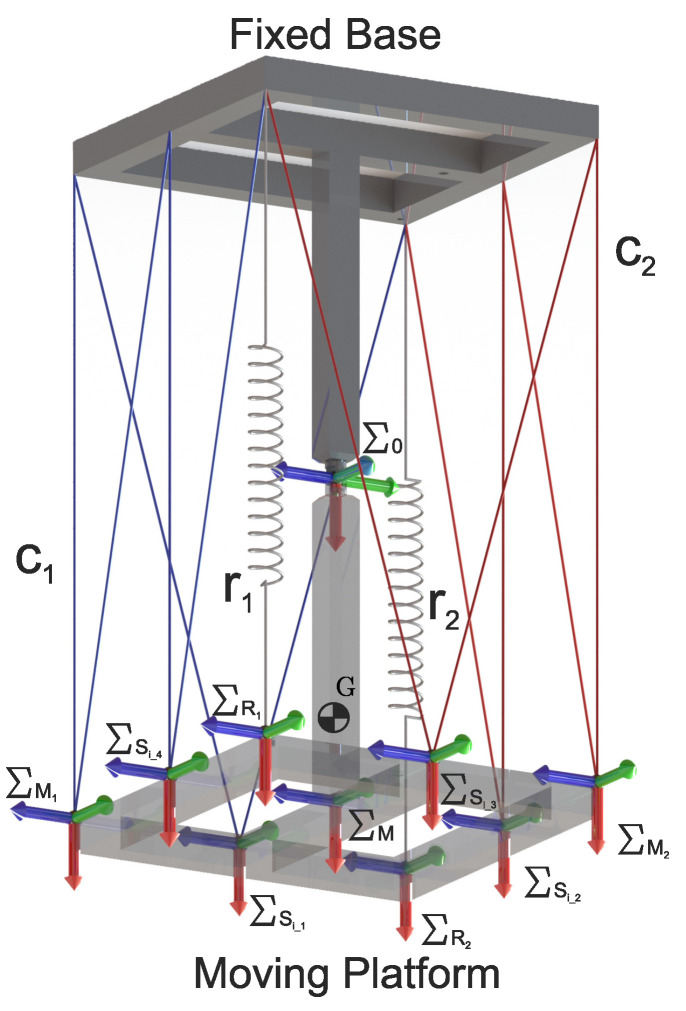 Figure 6
Figure 6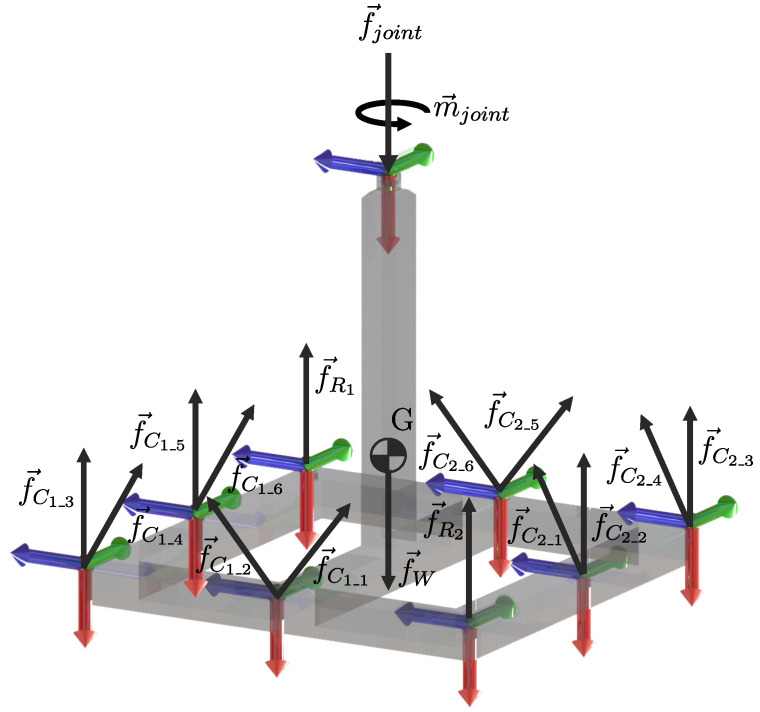 Figure 7
Figure 7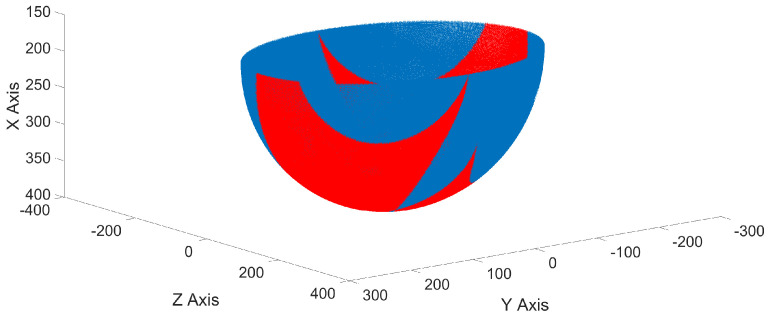 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsStructural Analysis and Optimization · Advanced Materials and Mechanics · Innovations in Concrete and Construction Materials