Re-framing bio-plausible collision detection: identifying shared meta-properties through strategic prototyping
Haotian Wu, Shigang Yue, Cheng Hu

TL;DR
This paper explores how insect-inspired neural systems can improve robotic vision by identifying shared properties and proposing a flexible framework for better adaptability.
Contribution
The paper introduces the Strategic Prototype, a modular framework capturing essential meta-properties of bio-inspired models for robotic vision.
Findings
Common meta-properties in LGMD models include layered structures and computational strategies.
The Strategic Prototype offers a flexible method for developing responsive robotic visual systems.
The LGMD-UP framework could advance bio-inspired visual systems in robotics.
Abstract
Insects exhibit remarkable abilities in navigating complex natural environments, whether it be evading predators, capturing prey, or seeking out con-specifics, all of which rely on their compact yet reliable neural systems. We explore the field of bio-inspired robotic vision systems, focusing on the locust inspired Lobula Giant Movement Detector (LGMD) models. The existing LGMD models are thoroughly evaluated, identifying their common meta-properties that are essential for their functionality. This article reveals a common framework, characterized by layered structures and computational strategies, which is crucial for enhancing the capability of bio-inspired models for diverse applications. The result of this analysis is the Strategic Prototype, which embodies the identified meta-properties. It represents a modular and more flexible method for developing more responsive and adaptable…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
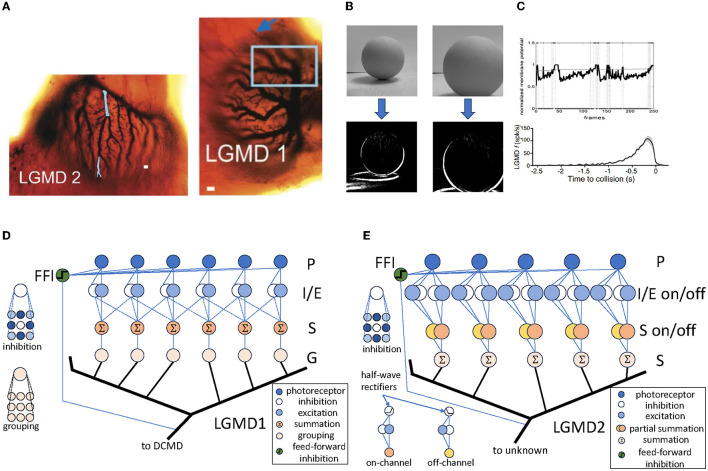 Figure 1
Figure 1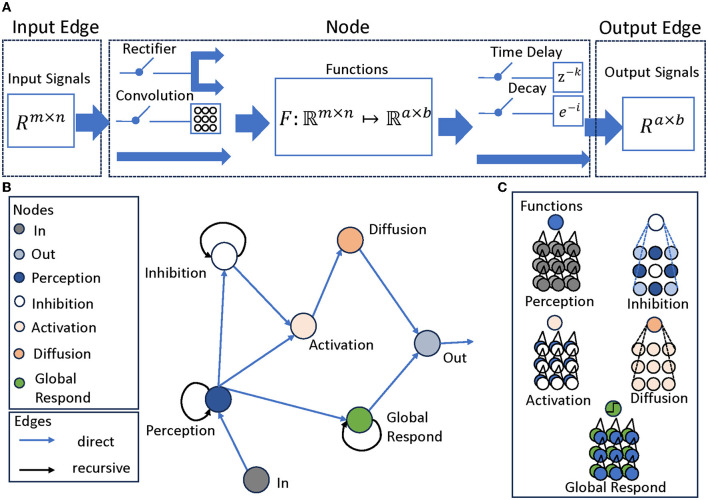 Figure 2
Figure 2Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsAdvanced Memory and Neural Computing · Modular Robots and Swarm Intelligence · Insect and Arachnid Ecology and Behavior