Theory Foundation of Physics-Enhanced Residual Learning
Shixiao Liang, Wang Chen, Keke Long, Peng Zhang, Xiaopeng Li, Jintao Ke

TL;DR
This paper provides a theoretical foundation for Physics-Enhanced Residual Learning (PERL), explaining its advantages in reducing neural network complexity, accelerating convergence, and requiring fewer training samples, with validation in autonomous vehicle trajectory prediction.
Contribution
It offers the first rigorous theoretical explanation for PERL's benefits, supported by proofs and numerical experiments in autonomous driving.
Findings
PERL achieves higher accuracy with fewer training samples.
Theoretical proofs confirm the advantages of PERL.
Numerical examples demonstrate practical effectiveness in autonomous vehicle prediction.
Abstract
Intensive studies have been conducted in recent years to integrate neural networks with physics models to balance model accuracy and interpretability. One recently proposed approach, named Physics-Enhanced Residual Learning (PERL), is to use learning to estimate the residual between the physics model prediction and the ground truth. Numeral examples suggested that integrating such residual with physics models in PERL has three advantages: (1) a reduction in the number of required neural network parameters; (2) faster convergence rates; and (3) fewer training samples needed for the same computational precision. However, these numerical results lack theoretical justification and cannot be adequately explained. This paper aims to explain these advantages of PERL from a theoretical perspective. We investigate a general class of problems with Lipschitz continuity properties. By examining…
Click any figure to enlarge with its caption.
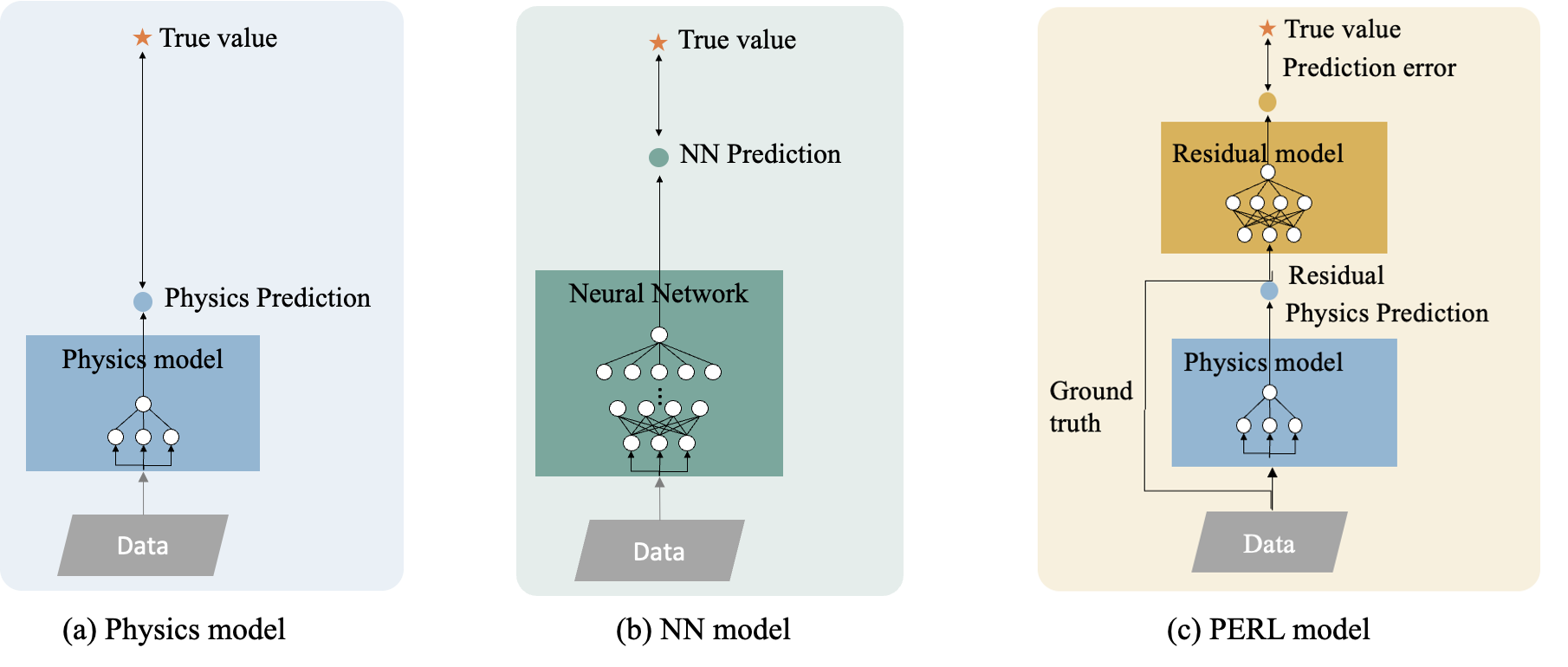 Figure 1
Figure 1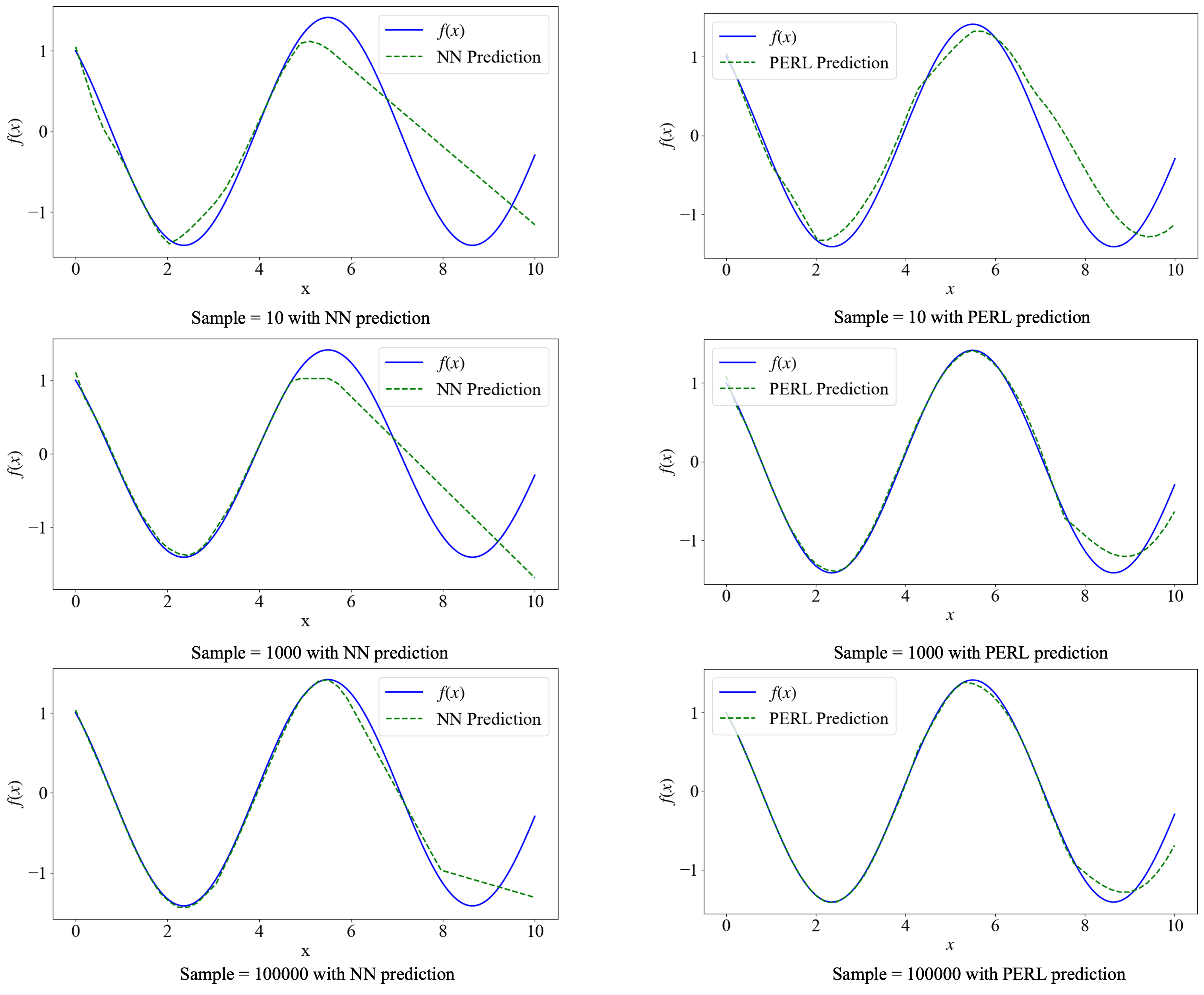 Figure 2
Figure 2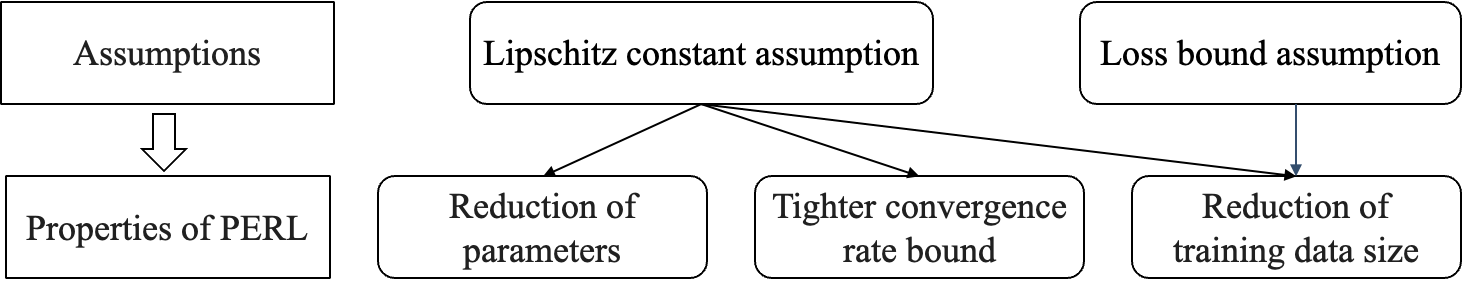 Figure 3
Figure 3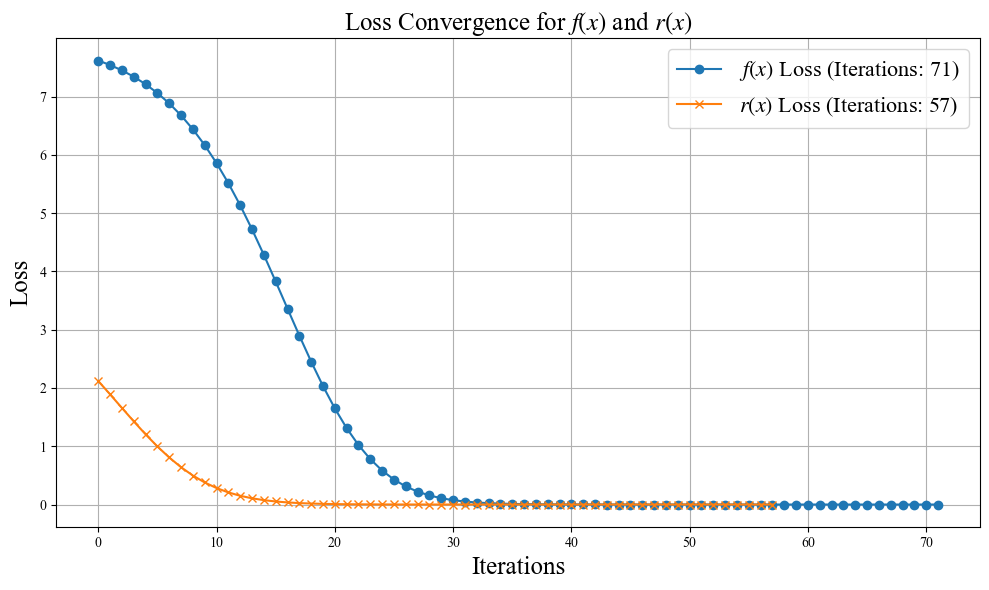 Figure 4
Figure 4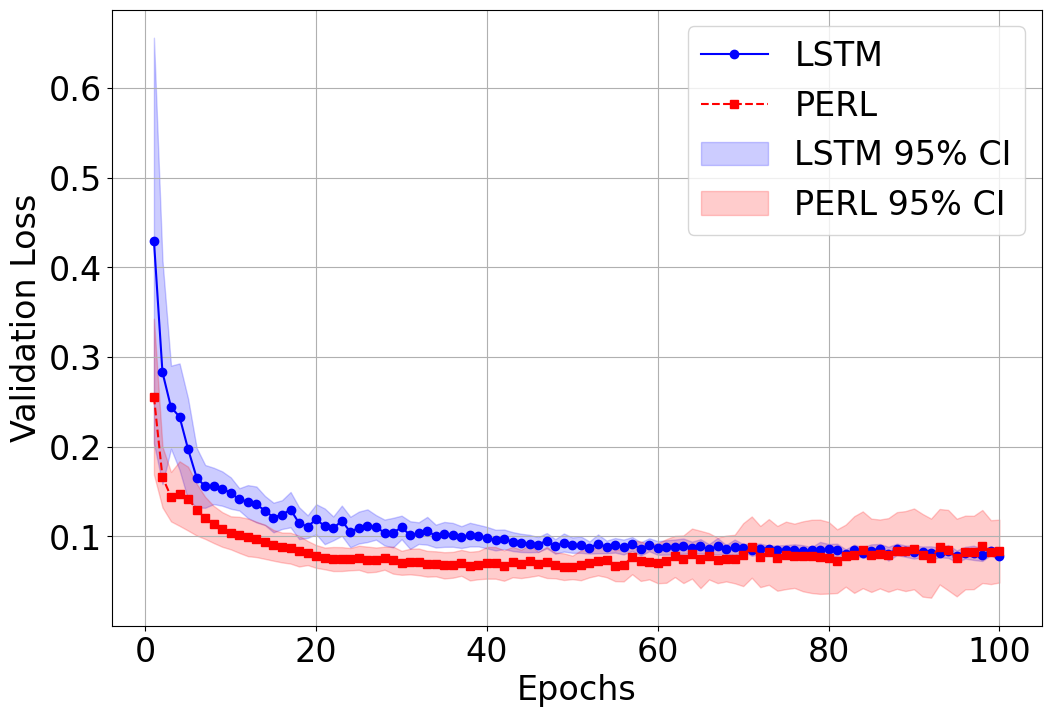 Figure 5
Figure 5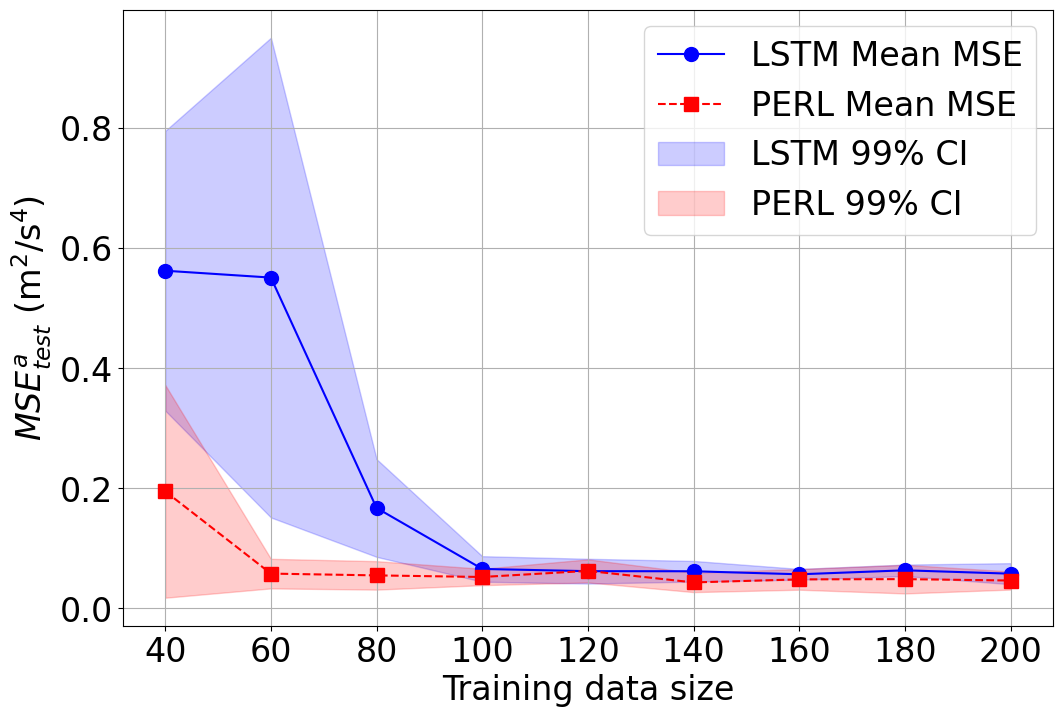 Figure 6
Figure 6 Figure 7
Figure 7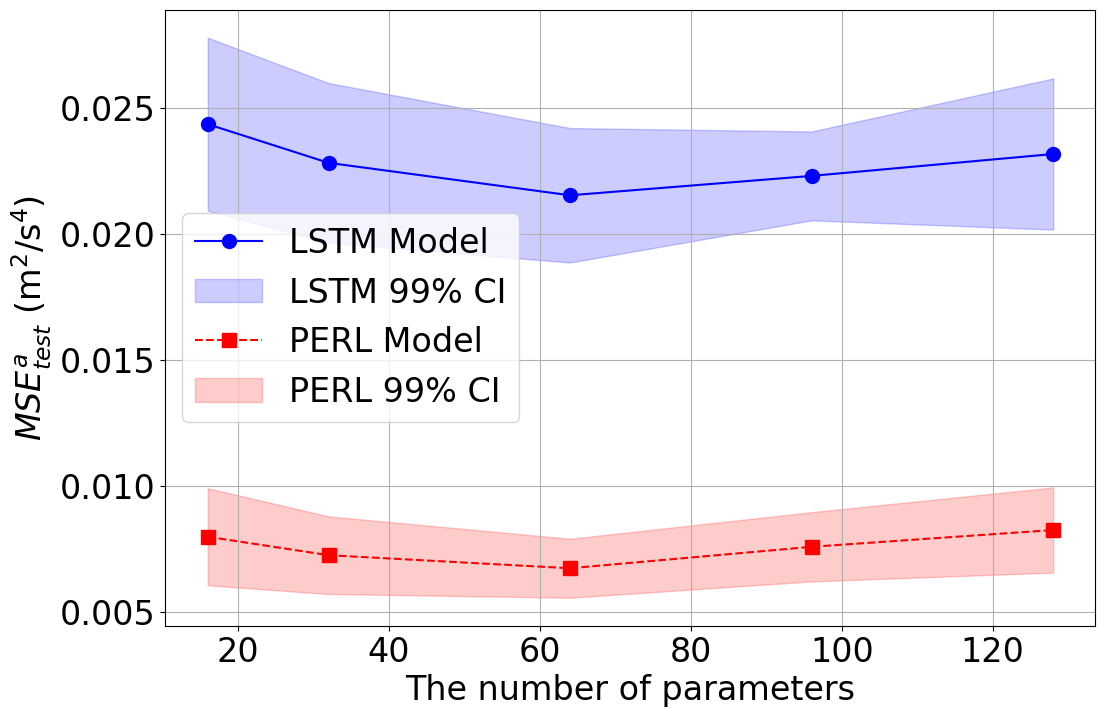 Figure 8
Figure 8Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsAutonomous Vehicle Technology and Safety · Model Reduction and Neural Networks · Vehicle Dynamics and Control Systems