Fair and Efficient Cake Division with Connected Pieces
Eshwar Ram Arunachaleswaran, Siddharth Barman, Rachitesh Kumar, and, Nidhi Rathi

TL;DR
This paper develops algorithms and hardness results for fair and efficient cake division with connected pieces, focusing on envy-freeness, Nash social welfare, and mean welfare, balancing fairness and efficiency.
Contribution
It introduces new approximation algorithms for envy-freeness and Nash social welfare in connected cake division and proves their computational hardness.
Findings
Efficient algorithm achieves 2+o(1) envy-freeness approximation.
Algorithm attains 3+o(1) approximation for Nash social welfare.
Maximizing Nash social welfare is APX-hard in this setting.
Abstract
The classic cake-cutting problem provides a model for addressing fair and efficient allocation of a divisible, heterogeneous resource (metaphorically, the cake) among agents with distinct preferences. Focusing on a standard formulation of cake cutting, in which each agent must receive a contiguous piece of the cake, this work establishes algorithmic and hardness results for multiple fairness/efficiency measures. First, we consider the well-studied notion of envy-freeness and develop an efficient algorithm that finds a cake division (with connected pieces) wherein the envy is multiplicatively within a factor of 2+o(1). The same algorithm in fact achieves an approximation ratio of 3+o(1) for the problem of finding cake divisions with as large a Nash social welfare (NSW) as possible. NSW is another standard measure of fairness and this work also establishes a connection between…
Click any figure to enlarge with its caption.
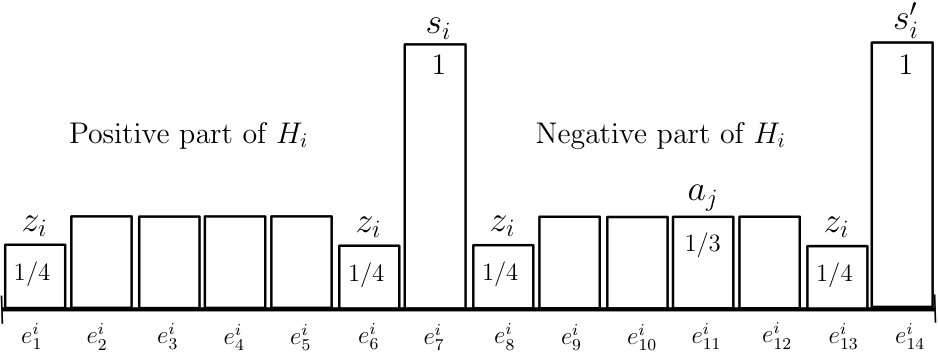 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Fair and Efficient Cake Division with Connected Pieces
Eshwar Ram Arunachaleswaran Siddharth Barman Rachitesh Kumar Nidhi Rathi Indian Institute of Science. [email protected] Institute of Science. [email protected] Institute of Science. [email protected] Institute of Science. [email protected]
Abstract
The classic cake-cutting problem provides a model for addressing fair and efficient allocation of a divisible, heterogeneous resource (metaphorically, the cake) among agents with distinct preferences. Focusing on a standard formulation of cake cutting, in which each agent must receive a contiguous piece of the cake, this work establishes algorithmic and hardness results for multiple fairness/efficiency measures.
First, we consider the well-studied notion of envy-freeness and develop an efficient algorithm that finds a cake division (with connected pieces) wherein the envy is multiplicatively within a factor of . The same algorithm in fact achieves an approximation ratio of for the problem of finding cake divisions with as large a Nash social welfare () as possible. is another standard measure of fairness and this work also establishes a connection between envy-freeness and : approximately envy-free cake divisions (with connected pieces) always have near-optimal Nash social welfare. Furthermore, we develop an approximation algorithm for maximizing the -mean welfare–this unifying objective, with different values of , interpolates between notions of fairness () and efficiency (average social welfare). Finally, we complement these algorithmic results by proving that maximizing (and, in general, the -mean welfare) is -hard in the cake-division context.
1 Introduction
Cake cutting is a fundamental problem in the fair-division literature. It models the task of allocating a divisible, heterogeneous resource among agents with distinct preferences, but equal entitlements. Indeed, the classic work of Steinhaus, Banach, and Knaster [28]—which lays the mathematical foundations of fair division—addresses cake cutting. Over the years, this problem has not only inspired the development of many interesting mathematical connections and algorithms (see, e.g., [25]), but has also been found relevant in real-world settings, such as border negotiations and divorce settlements [10]. Implementations of cake-division methods on platforms (such as Adjusted Winner [3]) further substantiate the practical relevance of this framework.
Here, the cake is represented by the segment and the cardinal preferences of the agents are specified via valuation functions over (the intervals of) the cake. We will throughout focus on the setting wherein the cake needs to be partitioned into exactly connected pieces (intervals) and each of the agents receives one of these intervals. This is a well-studied formulation of cake cutting and is motivated by applications wherein connectivity (across each allocated part of the resource) is a crucial requirement [10]; consider, e.g., land division, spectrum allocation, and non-preemptive interval scheduling.111The other variant of the problem, wherein agents can receive disconnected pieces, has also been studied in prior work; see, e.g., [24] and references therein. Related results on this variant are discussed at the end of this section.
Achieving fairness and efficiency are two pivotal goals in this resource-allocation context [10; 25]. The current work contributes to these objectives, with a focus on computational aspects of cake cutting. The fairness and efficiency objectives addressed in this work are detailed next.
A quintessential notion of fairness is envy-freeness: a division is said to be envy-free iff, under it, every agent prefers its own piece over that of any other agent [17]. The well-known result of Su [31] (see also [29] and [27]) shows that, under mild assumptions on agents’ valuations, envy-free cake divisions with connected pieces always exist. However, this existential result stands without an algorithmic counterpart; Stromquist [30] has shown that such an envy-free solution cannot be computed in bounded time, if the valuations are specified by an adaptive adversary.222Notably, for the complementary problem of finding envy-free solutions with noncontiguous pieces, the work of Aziz and Mackinzie [6] provides a hyper-exponential time algorithm. This negative result leads one to study relaxations/approximation guarantees, such as the ones considered in this work.
It is relevant to note that, while envy-freeness provides fairness guarantees on an individual level, in and of itself, this notion is not concerned with overall efficiency. By contrast, the concept of social welfare quantifies efficiency achieved by the agents as a whole. Social (utilitarian) welfare is defined as the sum of the values that the agents have for their own pieces. For this welfare objective, we establish (multiplicative) approximation guarantees in the cake-cutting setup.333Here, without loss of generality and to connect social welfare with the other objectives studied in this work, we equate social welfare with the average (arithmetic mean) of the values obtained by the agents.
A balance between the utilitarian (Benthamite) objective and the egalitarian (Rawlsian/max-min) welfare is achieved through Nash social welfare (), which is defined as the geometric mean of the agents’ values [23; 21]. This welfare function has traditionally been studied for homogeneous (divisible) goods, where it is known to possess strong fairness (envy-freeness) and (Pareto) efficiency properties [32]. The appeal of Nash social welfare continues to hold in the case of indivisible goods: Caragiannis et al. [12] have shown that (under additive valuations) Nash-optimal allocations of discrete goods satisfy a natural relaxation of envy-freeness and are Pareto efficient. The relevance of Nash social welfare, as a measure of fairness, motivates its study in the cake-cutting setup as well. Towards this end, this work develops algorithmic and hardness results for the problem of finding cake divisions that maximize Nash social welfare.
Generalized (Hölder) means provide a unified framework to address fairness and efficiency objectives. Specifically, with exponent parameter , the -mean welfare, , is defined as ; here s denote the valuations obtained by the agents in an allocation. We address -mean welfare for . In particular, this parameter range captures both Nash social welfare and social welfare: gives us the arithmetic mean (average social welfare) and, as tends to zero, the limit of is equal to the geometric mean (the Nash social welfare).444Note that, for each , the -mean welfare is ordinally equivalent to CES (constant elasticity of substitution) welfare functions that have the form .
This paper addresses all of the above-mentioned notions of fairness and efficiency. In particular, we develop approximation algorithms for finding cake divisions, with connected pieces, under the following objectives: (i) multiplicatively bounding envy, (ii) maximizing Nash social welfare, and (iii) maximizing -mean welfare, for . We complement these approximation guarantees by establishing hardness results for Nash social welfare and -mean welfare maximization. Our contributions are summarized in the following list.
- •
Envy-Freeness: We develop an efficient algorithm that finds a cake division (i.e., a partition of the cake into connected pieces along with a one-to-one assignment of these pieces among the agents) such that for every agent the value of its piece is at least times ’s value for any other agent’s piece (Theorem 3). Our algorithm for finding an approximately envy-free allocation is rather direct (see Section 3 for a description). The explainablity/simplicity of this algorithm is a notable feature, since it makes the developed method amenable for realistic implementations, such as the ones found on websites like Spliddit [19].
- •
Nash Social Welfare: Our algorithm for finding approximately envy-free divisions also provides a polynomial-time -approximation algorithm for the Nash social welfare maximization problem (Theorem 4).
We further show that approximately envy-free cake divisions (with connected pieces) always have near-optimal Nash social welfare: if in a cake division the envy is (multiplicatively) bounded within a factor of , then the Nash social welfare of the division is at least times the optimal (Theorem 5).555In comparison to this generic connection between envy-freeness and Nash social welfare, the cake divisions computed specifically by our algorithm admit a stronger guarantee–they essentially achieve an approximation bound of three for both envy and Nash social welfare.
Connections between envy-freeness and Nash social welfare have been established in other fair-division settings: addressing fair allocation of homogeneous,666Hence, such goods do not correspond to a heterogeneous cake. divisible goods under additive valuations, the work of Varian [32] shows that there always exists an allocation which is both envy-free and Nash optimal.777In fact, in the homogenous-goods case, such an allocation can be efficiently computed by solving the convex program of Eisenberg and Gale [15]. By contrast, finding a Nash optimal allocation is the cake-division setting is computationally hard. Also, Caragiannis et al. [12] have established that, when dividing indivisible goods, allocations that maximize Nash social welfare satisfy relaxations of envy-freeness. Our result (Theorem 5) shows that analogous connections hold in the cake-division framework as well.
We complement the algorithmic result for Nash social welfare by showing that it is APX-hard to find a Nash optimal cake division with connected pieces (Theorem 8). This hardness result implies, in particular, that the problem of maximizing Nash social welfare does not admit a polynomial-time approximation scheme (PTAS), unless P NP.
- •
Generalized-Mean Welfare: As mentioned previously, generalized means— with exponent parameter —is a family of functions which captures both Nash social welfare and (average) social welfare. For this unified objective, we develop a -approximation algorithm that runs in time ; here is the number of agents (Theorem 7). Hence, for average social welfare (i.e., the case) we obtain a polynomial-time -approximation algorithm. We note that this instantiation improves upon the -approximation guarantee obtained specifically for social welfare in the work of Aumann et al. [2].
Our algorithm, for maximizing -mean welfare, relies on “discretizing” the given cake-division instance to obtain an interval-scheduling problem, called the Job Interval Selection Problem (JISP). Then, we invoke the -approximation algorithm of Bar-Noy et al. [9] for JISP to obtain the stated approximation guarantee (Lemma 6 and Theorem 7).
We also establish that, for any fixed , finding cake divisions that maximize -mean welfare is -hard. This general result, though, holds for cake-division instances wherein the valuations are not necessarily normalized.888Agents’ valuations are said to be normalized iff, for every agent, the value of the entire cake is equal to one. For the social welfare case (i.e., the setting), our techniques can be adopted to establish -hardness even under normalized valuations. Hence, we can rule out a PTAS for the social welfare maximization problem. This strengthens the inapproximability result of Aumann et al. [2], which showed that efficient (in the social-welfare sense) cake cutting does not admit a fully polynomial-time approximation scheme (FPTAS).
Prior work has also studied the impact of envy-freeness on social welfare in the cake-cutting context. Specifically, Caragiannis et al. [11] along with Aumann and Dombb [1] establish bounds for price of envy-freeness, which is defined as the ratio between the social welfare of an optimal allocation and the social welfare of the best envy-free allocation. We extend this framework to -mean welfare and show that any (approximately) envy-free allocation provides an -approximate solution to maximizing -mean welfare, for (Theorem 11 in Section 8). We note that our upper bound on the price of envy-freeness for the instantiation (i.e., for social welfare) is essentially tight. This follows from considering the result of Aumann and Dombb [1], which establishes a bound on the price of envy-freeness, in the social-welfare context.
1.1 Additional Related Work
Another standard notion of fairness is proportionality. This criterion requires that every agent receives a piece of value at least times ’s value for the entire cake; here is the total number of agents participating in the cake-cutting exercise. In contrast to envy-freeness, proportionality is an algorithmically tractable solution concept; see [24] and references therein. Though, given that an (approximately) envy-free allocation is also (approximately) proportional,999We conform to the standard assumption that the valuations of the agents over the cake are sigma additive. approximation guarantees for envy-freeness (such as the ones developed in this work) give us matching bounds for proportionality as well.
With respect to maximizing social welfare, the result closest to ours is that of Aumann et al. [2]. We reiterate that the current work improves upon the algorithmic and hardness bounds obtained in [2]. Bei et al. [8] develop approximation results for maximizing social welfare with proportionality as a constraint. By contrast, we focus on social welfare by itself.
Deng et al. [14] present an algorithm that finds an additive approximation to an envy-free cake division with connected pieces. This algorithm, however, runs in exponential (in the number of agents) time.
If disconnected pieces can be assigned to each agent, then an additive approximation to envy-free divisions can be computed efficiently, see, e.g., [22] and the reentrant version of the last diminisher protocol in [10]. Also, for the disconnected-pieces variant and under specific valuations types, Aziz and Ye [7] present an efficient algorithm for maximizing Nash social welfare. The results of Kurokawa et al. [20] and Cohler et al. [13] address the noncontiguous-pieces setup as well. In particular, for a class of valuations, Cohler et al. [13] develop an algorithm for maximizing social welfare subject to the envy-freeness constraint. Our results are incomparable with all of these prior works, since we solely focus on allocation of connected pieces.
A relaxation of envy-free division entails free disposal. The idea here is to achieve envy-freeness at the cost of discarding some parts of the cake. Aziz and Mackenzie [6] (see also [26]) develop an exponential-time algorithm that finds envy-free divisions, wherein each agent receives a connected piece of value at least times ’s value for the entire cake. Here, the proximity to the proportional share is used to quantify the loss incurred due to the disposal. Our cake-cutting algorithm (Alg in Section 3) can be used to efficiently find, with disposal, an additively-approximate envy-free division, wherein each agent receives a connected piece of value times its value for the cake.101010This observation is a direct consequence of Lemma 1. We note that such a division is obtained as an intermediate solution in our algorithm; at the end, the algorithm allocates the entire cake.
1.2 Subsequent Work
The recent result of Goldberg et al. [18] provides an efficient algorithm for computing allocations in which the envy between any two agents is at most . That is, they obtain an additive-approximate guarantees for contiguous envy-free cake cutting (where every agent values the entire cake at ). We note that our algorithm developed in Section 3.1— that finds a cake division (with connected pieces) wherein the envy is multiplicatively within a factor of ; see Theorem 3—essentially matches the additive-approximation guarantee obtained in [18].
The work of Goldberg et al. [18] also prove interesting hardness results in the cake cutting context; in particular, they show that the decision problem of whether there exists a contiguous envy-free allocation satisfying the following constraints is NP-hard: (i) a certain agent must be allocated the leftmost piece; (ii) the ordering of the agents is fixed; or (iii) one of the cuts must fall at a given position.
2 Notation and Preliminaries
We consider the problem of dividing a cake (which metaphorically represents a divisible, heterogenous good) among agents. In this setup, the cake is modeled as the segment and the (possibly) distinct cardinal preferences of the agents are expressed as valuation functions, , over the intervals contained in (i.e., over the pieces of the cake). Specifically, for each agent and interval , with , the function maps to agent ’s value for it, .
Conforming to standard assumptions, this work addresses valuations that are (i) nonnegative, (ii) normalized: the value of the entire cake is equal to one, , (iii) divisible: for every interval and parameter , there exists a with the property that , and (iv) sigma additive: , for all disjoint intervals .
This divisibility property ensures that the valuations are non-atomic, i.e., for all and . Furthermore, this property allows us, as a convention, to regard two intervals to be disjoint even if they intersect exactly at an endpoint.
Our results hold as long as the valuations satisfy the above-mentioned properties and only require oracle access to the valuations. That is, our algorithms can be efficiently executed in the Robertson-Webb model [25], which supports oracle access to the valuations in the form of evaluation queries (which, given an agent and an interval , return ) and cut queries (which, given an agent , an initial point , and value , return the leftmost point such that ).
However, for ease of presentation, instead of the Robertson-Webb model, we will restrict attention to a well-studied setting in which the valuations of the agents can be explicitly given as input. In particular, we will consider valuations that are induced by density functions: given a piecewise-constant density function for an agent , the valuation of any interval is set to be . Valuations obtained by integrating piecewise-constant densities are said to be piecewise-constant. Indeed, such valuations can be given as input, say, in terms of the underlying density functions.
Problem Instances: A cake-division instance, with piecewise-constant valuations, is a tuple where denotes the set of agents and s specify the piecewise-constant valuations of the agents over the cake .
Allocations: As mentioned above, the goal here is to partition the cake into disjoint intervals and allocate them among the agents. We will focus solely on assigning to each agent a single interval, i.e., we will require that the piece assigned to each agent is connected.
For a cake-division instance with agents, an allocation is defined to be a collection of pairwise-disjoint intervals, , where interval is assigned to agent and .111111Note that the intervals are not indexed based on how their endpoints are ordered, rather the subscript of each interval in an allocation identifies the unique agent that owns this interval. We will use the term partial allocation to refer to collection of pairwise-disjoint intervals, , that do not necessarily cover the entire cake, .
The overarching objective of the current work is to find fair and efficient allocations. Relevant notions of fairness and efficiency are defined next.
Envy-Freeness: For a cake-division instance , an (partial) allocation is said to be envy free () iff each agent prefers its own interval over that of any other agent, for all agents .
We will address a natural relaxation of envy-freeness; specifically, we study allocations in which the envy between the agents is multiplicatively bounded. Given , an allocation is said to be -approximately envy free (-) iff , for every pair of agents .
A - allocation is envy free and, the smaller the value of , the stronger is the envy-freeness guarantee.121212Also, note that cannot be strictly less than one–the definition of an - allocation requires , even for .
Nash Social Welfare: For an allocation , the Nash social welfare is defined to be the geometric mean of the agents’ valuations, . In a cake-division instance, an allocation is said to be a Nash optimal allocation iff ; here denotes the set of all allocations.
Social Welfare and Generalized Mean: Social welfare is a standard measure of efficiency in the context of resource allocation. For an allocation , we define social welfare to be the arithmetic mean131313Since the work develops multiplicative approximation guarantees, we can consider the average valuation, instead of the sum of valuations, as a utilitarian objective. of the valuations, .
Generalized (Hölder) means, , provide a family of functions which interpolate between fairness and efficiency objectives. The -mean welfare of an allocation is defined as
[TABLE]
We will develop algorithmic and hardness results for maximizing the -mean welfare, with exponent . This parameter range, in particular, captures both and : gives us the arithmetic mean (social welfare) and, as tends to zero, the limit of is equal to the geometric mean (the Nash social welfare).
Overall, this paper is concerned with finding allocations (i.e., finding cake divisions with connected pieces) under the following objectives (i) bounding envy, (ii) maximizing Nash social welfare, and (iii) maximizing -mean welfare, for .
3 Finding Envy-Free and Nash Optimal Allocations
In this section, first we will develop an efficient algorithm for finding - allocations and, in tandem, obtain a polynomial-time -approximation algorithm for the Nash social welfare maximization problem. Next, Theorem 3 strengthens the approximation guarantees obtained in Theorem 2 and we develop an efficient algorithm that outputs - allocations. Subsequently, we will establish a generic connection between envy-freeness and Nash social welfare in the cake-cutting context: any -approximately envy-free allocation provides a -approximation to Nash social welfare.
Our algorithm, Alg, for finding approximately envy-free allocations starts by assigning an empty interval to each agent–it starts with the partial allocation consisting of empty sets. Then, the algorithm proceeds to assign successively higher valued pieces to the agents, i.e., it iteratively moves from one partial allocation to the next. Note that the initial partial allocation (consisting of empty intervals) is envy free. In fact, all the partial allocations, , computed during Alg’s execution, satisfy the following additive relaxation of envy-freeness, for a fixed constant :
[TABLE]
Alg updates a partial allocation by considering the unassigned pieces of the cake. Specifically, given a partial allocation , write to denote the minimum-cardinality collection of disjoint intervals that satisfy . In other words, consists of the intervals that remain after the assigned intervals in (i.e., s) are removed from . Since there are intervals in , there can be at most intervals in .
Alg keeps iterating as long as there exists an unassigned interval of high enough value for any agent. Then, part of is assigned to a judiciously-chosen agent who relinquishes the previous interval assigned to it, but now accrues a higher valuation. The criterion for selecting ensures that the above-mentioned invariant is maintained; this selection can be viewed as a moving-knife procedure applied within (see Figure 1).
At the end, when the values of the unassigned intervals are not much larger than the value of the assigned ones, Alg merges each unassigned interval in with an adjacent interval in the (final) partial allocation to obtain an approximately envy-free allocation (see Figure 2). The algorithm is detailed below and we prove in Theorem 2 that it efficiently finds a - allocation.
The following lemma shows that the final partial allocation considered by Alg (in Step 8) satisfies the additive relaxation of envy-freeness considered in the equation (1), not only between the assigned intervals, but also against the unassigned ones.
Lemma 1**.**
For a given a cake-division instance , with piecewise-constant valuations, and given parameter , let be the final partial allocation considered by Alg (i.e., is the partial allocation with which the while-loop terminates) and let be the set of unassigned intervals induced by . Then, for each agent we have
[TABLE]
**Proof ** First, we observe that the collection of intervals considered in any iteration of Alg is indeed a partial allocation, i.e., the intervals s are pairwise disjoint. This simply follows from the fact that whenever an agent is assigned a new interval , it is contained in the unassigned part of the cake, i.e., continues to not intersect with the intervals assigned to other agents.
Now, we will show, via an inductive argument, that the partial allocations computed by Alg satisfy the above-mentioned invariant (1). The initial (empty) partial allocation is envy free and, hence, trivially satisfies this additive relaxation of envy freeness. In an iteration, only the interval assigned to the selected agent gets updated. Since ’s valuation increases (by ), equation (1) continues to hold for , i.e., for all . Also, for all agents , the assigned intervals remain unchanged, i.e., equation (1) is satisfied for these agents.
It only remains to verify that for all . For agents (see Step 3 for the definition of ), we have ; the last inequality follows from the containment . Since is set to be , the desired inequality holds for all . For the remaining agents , the selection criterion applied in Step 4 gives us this inequality. Indeed, for all . Hence, for agents , we have .
Therefore, invariant (1) holds, in particular, for the partial allocation obtained at the termination of the while-loop. Also, the fact that the while-loop terminates with as the final partial allocation implies that, for all and all , we have . That is, for each , the final partial allocation satisfies the stated inequalities: for all . \sqcap$$\sqcup
Using this lemma, we will now show that the allocation computed by Alg is -.
Theorem 2**.**
Given a cake-division instance with piecewise-constant valuations, and constant , Alg computes a -approximately envy-free allocation in polynomial time.
**Proof ** To bound the algorithm’s time complexity note that in every iteration the selected agent’s valuation (for the interval assigned to it) additively goes up by : in Steps 3 and 4, for the selected agent , we have . Since the total value of the cake for every agent is equal to one, Alg will iterate at most times. Also, note that every step of the algorithm can be implemented efficiently and is set to be a constant. Hence, Alg runs in polynomial time.
As observed in the proof of Lemma 1, the collection of intervals, , considered by Alg in Step 8 is indeed a partial allocation, i.e., the intervals s with which the while-loop terminates are pairwise disjoint. Let be the set of unassigned intervals induced by the final partial allocation . Also, write to denote the allocation returned by Alg; note that for all agents . Also, since contains intervals, .
Summing inequality (2) (see Lemma 1) across all intervals gives us
[TABLE]
The last equality holds since .
This inequality provides the following lower bound on the value attained by any agent in the returned allocation : . Therefore, with and ,141414For the case one can efficiently find an envy-free allocation (i.e., a - allocation) by the cut-and-choose protocol [24]. we have the following bound:
[TABLE]
By construction, for each agent , the returned interval is composed of and at most two other unassigned intervals from . Therefore, instantiating inequality (2) with and the (at most two) unassigned intervals associated with it, we get . That is, .
Using this inequality and the bound (4), we obtain the desired approximate envy-freeness guarantee for all . \sqcap$$\sqcup
Remark**.**
Theorem 2 provides a proof of existence of approximately envy-free cake divisions. Indeed, this existential guarantee also follows from the (stronger) result of Su [31]. However, in contrast to [31], the current proof renders an efficient algorithm and relies on a potential argument–the proof in [31] invokes Sperner’s Lemma and, hence, achieves totality through a parity argument.
3.1 Finding - Allocations:
In this section, we develop a new algorithm that builds on and improves the approximation guarantee obtained in Theorem 2. Note that if the partial allocation considered in Step 8 of induces at most unassigned intervals, we achieve the desired -approximation guarantee and prove Theorem 3. We therefore begin by identifying various properties of a partial allocation that induces no more than unassgined intervals, and detail required additional steps in that ensures at least one of these properties are maintained throughout its execution.
Write to denote the set of unassigned intervals induced by the partial allocation . Since contains intervals, . Note that can induce unassigned intervals iff there are unassigned intervals at both ends of the cake and no two assigned intervals are adjacent to each other. Therefore, iff the partial allocation satisfies either of the following two properties:
There exists some assigned interval , for , that is adjacent to either ends, [math] or , of the cake. Here, we can denote as or . 2. 2.
There exists at least two assigned intervals , for , that are adjacent to each other. Here, we can denote as .
The key idea is to maintain a partial allocation that satisfies at least one of the above-mentioned two properties throughout the execution of . Towards this, we detail the additional steps required in that enables us to achieve this goal. During the execution of the while-loop in , we identify cases where an application of Steps 3 and 4 on the unassigned interval (selected in Step 2) would violate properties (i) or (ii), and in such settings we execute a moving-knife procedure from the right end of ; specifically, we execute the following steps instead:
Step 3’: Let and, for every agent , set to be the right-most point such that .
Step 4’: Select agent .
The next claim proves that addition of the above steps to ensures that no more than unassigned intervals can be induced by any partial allocation considered throughout the execution of .
Claim 1**.**
*For a given cake-division instance , with piecewise-constant valuations, and a parameter , the above-mentioned additional steps to the while-loop in ensures that the final partial allocation considered in its Step 8 induces at most unassigned intervals. *
**Proof ** During the execution of the while-loop in , let us consider the first iteration where the partial allocation induces exactly unassigned intervals or , i.e., it satisfies at least one of the above-mentioned properties. Our goal then is to maintain till the completion of the while-loop. Write to denote the unassigned interval considered during the next iteration of while-loop in (Step 2). We inspect the two properties described in the beginning of Section 3.1 and identify the settings where an application of Steps 3’ and 4’ (instead of Steps 3 and 4) in the while-loop maintain .
Case(i): The partial allocation in the current execution of the while-loop of satisfies property (1).
If the partial allocation, is of the form with for some and , then Steps 3 and 4 ensures in the next iteration. This is due to the fact that the partial allocation continue to satisfy either property (i) or (ii). Therefore, we consider the other case when is of the form with for some and .
Sub-case 1: The unassigned interval, considered during the next iteration of while-loop (Step 2 of ) is not .
Here, an application of Steps 3 and 4 on ensures that the partial allocation (after this iteration) acquires property (ii), and hence maintains .
Sub-case 2: The unassigned interval, considered during the next iteration of while-loop (Step 2 of ) is .
In this case, we apply Steps 3’ and 4’ in the while-loop (instead of Steps 3 and 4) and perform a moving-knife procedure within from the right end. If agent selected in Step 4’ is such that , then the partial allocation (after this iteration) retains property (i). Otherwise, it acquires property (ii). In other words, if , becomes adjacent to some other assigned interval, and the partial allocation acquires property (ii). Otherwise, remains unchanged and then property (i) is retained. Overall, is maintained through the next iteration.
Case(ii): The partial allocation in the current execution of the while-loop of satisfies property (2).
In this case, we denote as where and are two assigned intervals that are adjacent to each other.
Sub-case 1: The unassigned interval, considered during the next iteration of while-loop (Step 2 of ) is not .
Here, an application of Steps 3 and 4 on ensures that the partial allocation (after this iteration) either retains property (ii), or acquires property (i) if is adjacent to the left end of the cake . Overall, is maintained through the next iteration.
Sub-case 2: The unassigned interval, considered during the next iteration of while-loop (Step 2 of ) is .
In this case, we apply Steps 3’ and 4’ in the while-loop (instead of Steps 3 and 4) and perform a moving-knife procedure within from the right end. If agent selected in Step 4’ is agent (or agent ) then it ensures that (or ) becomes adjacent to . Otherwise, both and remain unchanged and continue to be adjacent to each other. That is, the above additional steps guarantee that the partial allocation (after this iteration) retains property (i).
Overall, the addition of Steps 3’ and 4’ (in the while-loop) to ensures that the partial allocation considered in its Step 8 induces at most unassigned intervals, and hence completes the proof. \sqcap$$\sqcup
Claim 1 therefore ensures that with the above-mentioned additions (Steps 3’ and 4’) maintains a stronger bound: each partial allocation (and in particular, the one considered in its Step 8) computed by the algorithm induces at most unassigned intervals, i.e., . Claim 1 combined with the proof of Theorem 2 therefore proves the following result.
Theorem 3**.**
Given a cake-division instance with piecewise-constant valuations, and constant , there exists a polynomial-time algorithm that computes a -approximately envy-free allocation in polynomial time.
3.2 Finding Nash Optimal Allocations
Next, we will show that the allocations computed by Alg are not only -, but they also provide a -approximation to Nash social welfare.
The following theorem shows that an approximation ratio close to can be obtained for the Nash social welfare maximization problem when the number of agents, , is appropriately large. Such an approximation guarantee can also be achieved for constant values of . This follows from the observation that, for the Nash social welfare maximization problem, one can compute an -approximate solution (with ) in time ; see Appendix 7 for details. Therefore, for any number of agents, maximizing Nash social welfare admits a polynomial-time -approximation algorithm.
Theorem 4**.**
In cake-division instances with piecewise-constant valuations, the problem of maximizing Nash social welfare (with connected pieces) admits a polynomial-time -approximation algorithm; here is the number of agents participating in the cake-cutting exercise.
**Proof ** Let be the allocation returned by Alg and write to denote the final partial allocation considered by Alg (i.e., is the partial allocation with which the while-loop terminates). As before, denotes the set of unassigned intervals induced by . Note that, for each agent , the following containment holds ; hence, .
Let denote the interval assigned to agent in the Nash optimal allocation . Also, write to denote the set of intervals in the collection that intersect with (see Figure 3 for an illustration), .151515Here, we follow the above-mentioned convention that mandates two intervals to be disjoint, if they intersect exactly at an endpoint. Let denote the cardinality of this set, .
Since , interval is covered by the union of intervals in ; .
Lemma 1 gives us for all ; as before, is the constant used in Alg. In addition, recall that and (see equation (4)). These observations imply that
[TABLE]
Summing these inequalities and using the containment we get161616Recall that the valuations are sigma additive.
[TABLE]
Therefore, . Simplifying this equation gives us
[TABLE]
Next, we will show, via a simple counting argument, that . For an interval in the Nash optimal allocation, write to denote the number of intervals in the collection whose right endpoint in contained in . Note that for all ; at most one interval in ends after . Therefore, . The last inequality follows from the observation that the total number of right endpoints across intervals in (i.e., ) is at most , since each right endpoint is associated with exactly one interval from (recall that and ).
The AM-GM inequality implies . This bound, along with inequality (5),171717Recall that . establishes the stated approximation guarantee:
[TABLE]
. \sqcap$$\sqcup
We conclude this section by proving that the approximately envy-free allocations always have near-optimal Nash social welfare. Note that, directly invoking the following theorem for the - allocations computed by Alg, one would essentially obtain an approximation ratio of six for the Nash social welfare maximization problem. Indeed, this guarantee is weaker than the one shown (via a tailored analysis) in Theorem 4.
Theorem 5**.**
In a cake-division instance, let be an -approximately envy-free allocation and be a Nash optimal allocation. Then,
- (i)
* provides a -approximation to Nash social welfare, i.e., .*
- (ii)
* is -approximately envy-free.*
**Proof ** Let denote the interval assigned to agent in the Nash optimal allocation . Also, write to denote the set of intervals in the - allocation that intersect with , i.e., .181818Here, we follow the above-mentioned convention that mandates two intervals to be disjoint, if they intersect exactly at an endpoint. Let denote the cardinality of this set, . Since is an allocation, we have . Therefore, for all agents , interval is covered by the union of intervals in ; . Also, the fact that is - implies for all . Summing these inequalities and using the containment gives us191919Recall that the valuations are sigma additive.
[TABLE]
Therefore, . Simplifying we get
[TABLE]
Next, we will show, via a simple counting argument, that . For an interval in the Nash optimal allocation, write to denote the number of intervals in allocation whose right endpoint in contained in . Note that for all ; at most one interval in ends after . Therefore, . The last inequality follows from the observation that the total number of right endpoints across intervals in (i.e., ) is exactly equal to , since each right endpoint is associated with exactly one interval.
The AM-GM inequality implies . This bound, along with inequality (6), establishes the stated approximation guarantee: .
To prove the complementary part of the Theorem (part (ii)) assume, towards a contradiction, that is not -. That is, there exist agents and such that . The divisibility of valuations ensures that the interval can be partitioned into two disjoint intervals and with the property that .
Furthermore, since the valuations are sigma additive, for agent either interval or is of value strictly greater than . Say, . Now, consider a partial allocation obtained by setting for all , and . Note that , hence we have . Given that any partial allocation can be extended to an allocation without decreasing the Nash social welfare, the previous inequality contradicts the optimality of . This establishes part (ii) of the theorem and completes the proof. \sqcap$$\sqcup
4 Approximation Algorithm for -Mean Welfare Maximization
This section addresses cake-division with the objective of maximizing the -mean welfare. We obtain an approximation algorithm for this problem via a simple reduction to the weighted job interval selection problem (JISP) [16; 9].
A problem instance of JISP consists of a tuple , where denotes the number of jobs,202020In the developed reduction, the number of jobs will be set equal to the number of agents present in the cake-division instance, hence we overload to denote both of these quantities. and for each job we have , a collection of intervals in . Here, every interval in is endowed with a weight . The goal of JISP is to select a collection of non-intersecting intervals such that at most one interval is selected from each and the total weight of the collection is as large as possible. Formally, a feasible solution to a JISP problem instance consists of a set of intervals such that: (i) all the selected intervals are pairwise disjoint, for all . (ii) at most one interval is selected from each job: or is the empty interval, for all .
The objective of JISP is to find a feasible solution that maximizes .212121We follow the convention that the weight of the empty interval is equal to zero. For a solution , we denote the value of this weight objective by .
The following lemma shows that, given a cake-division instance, we can construct a JISP instance such that the -mean welfare is approximated by the weight objective. That is, the lemma presents an approximation-preserving reduction from cake division to interval scheduling.
Lemma 6**.**
Given a cake-division instance with piecewise-constant valuations along with parameters and , one can construct a JISP instance , in time , such that
If is an allocation that maximizes the -mean welfare in the given cake-division instance, then there exists a feasible solution of the JISP instance such that
[TABLE] 2. 2.
For every feasible JISP solution , there exists a partial allocation in the cake-division instance with the property that . Furthermore, partial allocation can be computed from the given JISP solution in polynomial time.
**Proof ** First, we describe the construction of a JISP instance from the given cake-division instance. The reduction is based on discretizing the cake.
Let , where is a given parameter. We find a set of points (cake cuts) such that for every index and each agent we have . The procedure to find these points starts by initializing . Then, iteratively, for each , we find using : for each agent , find the smallest value such that .222222This step can be performed efficiently in the Robertson-Webb model, as well as for piecewise-constant valuations. If for an agent we have , then assign . We set and continue as long as . Write to denote this set of points and note that the normalization of the agents’ valuations ensures that the cardinality of .
The reduction to JISP is as follows. For each agent , we associate a job with the same index in the JISP instance . Furthermore, for each , the set is defined to be collection of all intervals with endpoints in the computed set of cuts , i.e., . Note that the set of intervals is the same for all jobs. Each weight function is defined as for all intervals .
Now, we will prove the first part of the Lemma. Consider , an allocation that maximizes the -mean welfare. From , we obtain a feasible solution by setting , for each , to be the largest interval of the form that is contained within . Specifically, if , then where and .232323If is the empty interval, then so is . Excluding the (trivial) corner cases, we have and . Note that is obtained by removing subintervals at the two ends of . These removed subintervals are of value at most and , respectively. Hence, using the fact that the valuations are sigma additive, we obtain the following bound on the value lost in discretizing to obtain :
[TABLE]
Since the intervals in the optimal allocation are pairwise disjoint and each (or is the empty interval), the collection is a feasible solution of the JISP instance.
For analysis, we partition the set of agents (and correspondingly the jobs) into low-valued and high-valued agents. In particular, define and to be the remaining agents.
For all agents , by definition, we have
[TABLE]
For all jobs
[TABLE]
Let be the optimal -mean welfare in the given cake-division instance, i.e., . Note that , since the -mean welfare of a proportional division of the cake is at least . Given that and partition , we have . Using inequality (8), we obtain a lower bound on the contribution of the agents in to the -mean welfare
[TABLE]
Equation (9) connects this lower bound to the weight of the feasible solution
[TABLE]
Multiplying both sides of this inequality by , we get242424Recall that the weights of all the intervals in the JISP instance are nonnegative.
[TABLE]
Finally, we obtain the desired inequality by exponentiating both sides of the previous inequality to the power
[TABLE]
This concludes the proof of the first part of the Lemma.
For the second part of the Lemma, note that every feasible solution of the JISP instance can also be mapped directly to an (partial) allocation of the cake: each agent receives the interval , which (by feasibility of ) does not intersect with any other agent’s interval. Also, by definition of the weights, , which gives us the desired equality.
\sqcap$$\sqcup
This lemma allows us to directly invoke the result of Bar-Noy et al. [9] (which provides a polynomial-time -approximation algorithm for JISP) to obtain an approximation algorithm for the -mean maximization problem. The main result of this section is stated in the following theorem.
Theorem 7**.**
For , and cake-division instances with piecewise-constant valuations, there exists an algorithm that—in time —finds a -approximation to the -mean welfare maximization problem.
**Proof ** For the given cake-division instance, we instantiate Lemma 6 to construct a JISP instance in time .
Let be an allocation in the cake-division instance that maximizes the -mean welfare. The first part of Lemma 6 asserts that there there exists a feasible solution in the constructed JISP instance such that
[TABLE]
The last inequality follows from the fact that .
Let be an optimal solution of the JISP instance, i.e., has the maximum possible weight, , among all feasible solutions.
The algorithm of Bar-Noy et al. [9] achieves an approximation ratio of for JISP, i.e., it efficiently computes a feasible schedule which satisfies, . Note that, using the second part of Lemma 6, we can efficiently find an allocation (in the underlying cake-division instance) such that . Exponentiating both sides of the previous inequality to the power gives us
[TABLE]
The last inequality follows from (10) and the optimality of . To obtain the desired approximation guarantee we divide both sides of the previous equation by
[TABLE]
Therefore, the computed allocation achieves the stated approximation ratio of .
For establishing the time complexity of this algorithm, note that the size of the constructed JISP instance is . Hence, the algorithm of Bar-Noy et al. [9] would run in time that is polynomial in , i.e., the specified running-time bound follows. \sqcap$$\sqcup
Note that for any constant , Theorem 7 provides a constant-factor approximation algorithm that runs in polynomial time. In particular, for the case (i.e., for average social welfare), we obtain a polynomial-time -approximation algorithm. As mentioned previously, this instantiation improves upon the -approximation guarantee obtained specifically for social welfare in the work of Aumann et al. [2].
5 Hardness of Maximizing Nash Social Welfare
This section establishes the -hardness of finding cake divisions (with connected pieces) that maximize Nash social welfare. That is, we show that, for a fixed constant , it is -hard to find an allocation (i.e., a cake division with connected pieces) whose Nash social welfare is within times the optimal. Appendix 6 details an analogous hardness result for the -mean welfare objective.
Theorem 8**.**
Given a cake-division instance with piecewise-constant valuations, the problem of computing an allocation that maximizes Nash social welfare is -hard.
We prove this theorem by developing a (gap-preserving) reduction from the Gap 3-SAT-5 problem [4; 5]. Section 5.1 presents the key gadget used in the reduction and the proof of Theorem 8 appears in Section 5.2.
The Gap 3-SAT-5 problem, with parameter , is defined as follows
Input: A Boolean formula in conjunctive normal form; in particular, is specified as a conjunction of a set of clauses, , defined over Boolean variables . Here, each clause is a disjunction of at most three literals and every variable appears in at most five clauses in (either as literal or as its negation ).
Objective: Distinguish between the following two cases
YES: is satisfiable.
NO: No assignment of the variables satisfies more than fraction of the clauses in .
Gap 3-SAT-5 is a promise problem: the given Boolean formula is guaranteed to satisfy either the YES case or the NO case. It is shown in [4; 5] that there exists a constant for which Gap 3-SAT-5 is -hard, i.e., for a specific constant , it is -hard to distinguish whether a given instance of Gap 3-SAT-5 satisfies the YES case or the NO case.
We develop a gap-preserving reduction from Gap 3-SAT-5 to the Nash social welfare maximization problem. That is, in our reduction, if the given Gap 3-SAT-5 instance satisfies the YES case, then the Nash social welfare in the constructed cake-division instance will be above a threshold, say . Complementarily, in the NO case, the Nash social welfare will be below , for a fixed constant , which depends only on the underlying gap parameter . Therefore, using a -approximation algorithm for the Nash social welfare maximization problem, one can distinguish between the YES and the NO cases of Gap 3-SAT-5. Since the latter problem is -hard, such an approximation algorithm does not exist, unless . That is, we obtain -inapproximability of maximizing Nash social welfare and, hence, the stated -hardness result holds.
5.1 Construction of a Cake-Division Instance
In this section, starting with an instance of Gap 3-SAT-5, we will construct a cake-division instance which achieves the above-mentioned gap property for Nash social welfare. This construction is used in Section 5.2 to complete the reduction and prove Theorem 8.
Let and , respectively, denote the number of variables and the number of clauses in a given Boolean formula . Recall that for Gap 3-SAT-5 instances each variable occurs in at most five clauses. Furthermore, since each clause in contains at most three literals, we have .
In the reduction, for ease of presentation, the constructed cake will correspond to the segment (it can be rescaled to without affecting the arguments). The cake will be composed of pairwise-disjoint intervals, , each of length , along with an auxiliary interval (placed at the end of the cake) of length one. That is, the cake is obtained by concatenating s and . For all , we associate variable with the interval . The cake-division instance will have one agent for every clause , with . In addition, the interval is itself partitioned into unit-length subintervals, (see Figure 4). A notable property of the reduction is that each subinterval gets valued by at most one agent.
The cake-division instance will have four sets of agents: (1) separator agents, (2) base agents, (3) clause agents and, (4) an auxiliary agent. We will say that an agent ’s value within an interval is constant iff ’s density function is constant throughout , i.e., we have and this value is said to be constant within iff the density function, , satisfies for all . Next, we specify the valuations of all the agents based on their type.
- •
Separator Agents: We include separator agents–two separator agents and for each interval . The density function of both and is nonzero only within . Specifically, and the value of is constant within this subinterval . Also, we set and this value is constant within .
The separator agent is introduced in the reduction to ensure that, in any Nash optimal allocation, no single agent receives both the left and right halves of . At a high level, the left-half of represents the positive occurrences of the variable in and right-half represents the negated occurrences. Similarly, the presence of the separator agent ensures that, in any Nash optimal allocation, no agent receives an interval which nontrivially intersects with both and .252525The separator agent accomplishes this goal for interval and the auxiliary interval .
- •
Base Agents: We include base agents–one base agent for each interval , with . The total value of is spread over four subintervals in . Specifically, for each subinterval and the value of is constant within each of these four subintervals.
- •
Clause Agents: We consider clause agents–one clause agent for each clause , with . Here, agent values a subinterval in iff clause contains the variable . Hence, the number of subintervals valued by is equal to the number of literals in clause . For each variable , we (arbitrarily) index the clauses (in ) that contain it as a positive literal, i.e., define ; here is the total number of clauses that contains as a positive literal. Analogously, index the clauses (in ) that contain the negated literal , . Given that at most five clauses contain , we have . Also, since both literals and must occur in , we have and . Equivalently, and ; this bound enables us to consider at most four subintervals and in the two halves of , respectively. With this indexing in hand, we will refer to a clause as the th positive occurrence of iff . Similarly, we will refer to a clause as the th negative occurrence of iff .
As mentioned above, to set the valuation of the clause agent we consider the variables that occur in the clause . For each variable in , if is the th positive occurrence of then we set . Otherwise, if is the th negative occurrence of variable then we set . If contains less than three variables, then is made to positively value the auxiliary interval by an amount that ensures normalization . In particular, in case is a disjunction of literals, we set .
In light of this construction, we will henceforth refer to the left half of the interval , , to be the positive part, while the right half, , to be the negative part of .
- •
Auxiliary Agent: Finally, we have one auxiliary agent whose total valuation is confined to auxiliary interval , i.e., and this value is constant within .
In summary, we have constructed in polynomial-time a cake instance with separator agents, base agents, clause agents and auxiliary agent; hence . Also, note that in the constructed instance, the valuation of every agent is piecewise-constant and normalized, .
5.2 Proof of Theorem 8
Consider an instance of the Gap 3-SAT-5 problem, with Boolean formula and parameter . Recall that, Gap 3-SAT-5 is a promise problem wherein it is -hard to distinguish between the YES case ( is satisfiable) and the NO case (no assignment satisfies more than fraction of the clauses in ). Denote the set of variables in by and the set of clauses by . Construct a cake-division instance as detailed in Section 5.1. Independent of the underlying case (YES or NO), the following claim ensures the existence of a Nash optimal allocation for with useful structural properties.
Claim 2**.**
The cake-division instance admits a Nash optimal allocation with the property that:262626Recall that denotes the interval assigned to agent , under allocation .
- (i)
For each , base agent is assigned exactly one of the following intervals: , , ,
- (ii)
For each , and
- (iii)
**
The proof of Claim 2 is deferred to Appendix A.1. We will now proceed to prove Theorem 8.
First, suppose that satisfies the YES case, i.e., there exists a Boolean assignment to the variables that satisfies all clauses in . Using , we define a partial allocation that achieves “high” Nash social welfare. In particular, for all , assign agent the subinterval (i.e., ) and assign agent the subinterval . In addition, allocate agent the interval , if . Otherwise, if , assign the interval to . That is, is allocated the positive part of if and the negative part of , if . Since satisfies all the clauses, every clause either contains a literal for which or a literal with . Therefore, one of the following alternatives holds, for an index : is the th positive occurrence of variable with or is the th negative occurrence of variable with . If the former condition holds, then allocate the interval to the clause agent . Otherwise, if the latter condition holds, assign the interval to agent . Finally, allocate interval to auxiliary agent , i.e., set . One can directly verify that is a well-defined partial allocation in . Also, since the valuations of the agents are nonnegative, can be extended to a full allocation without reducing the value achieved by any agent. Let denote the optimal Nash social welfare value obtained in , under the current assumption that satisfies the YES case. Noting the values obtained by all the agents under , we get
[TABLE]
To complete the proof we now consider the complementary setting wherein falls under the NO case, i.e., under any assignment, at least clauses remain unsatisfied. In , let be a Nash optimal allocation that satisfies Claim 2. With the NO case in hand, write to denote the optimal value of the Nash social welfare in , i.e., . By property (ii) of Claim 2, we have that and , for all . This allocation to the separator agents ensures that the interval assigned to any other agent , , is contained in exactly one of the following intervals: the positive part of , or the negative part of , or the auxiliary interval .
Define the following index sets for the base agents and the clause agents, respectively, and . Write and . By property (i) in Claim 2, we can conclude that the base agents s not indexed in (i.e., the remaining base agents) receive either or . Note that, for each , the base agent obtains a value of in and the base agents not indexed in obtain a value of . Indeed, in comparison to the YES case, here the base agents indexed in and the clause agents indexed in receive lower values. The following claim provides a lower bound on the number of such agents; the proof of this claim is deferred to Appendix A.2.
Claim 3**.**
With and as defined above, we have .
Note that under the allocation , the auxiliary interval is divided amongst clause agents (indexed in ) and the auxiliary agent .272727 follows from the fact that (property (iii) in Claim 2), i.e., , and the auxiliary agent has nonzero valuation (density) only within . The following claim upper bounds the contribution of these agents to .
Claim 4**.**
In the above setting, we have .
The proof of Claim 4 follows from basic calculations and appears in Appendix A.3. The above-mentioned observations and Claim 4 give us the following upper bound on (the optimal Nash social welfare in ):
[TABLE]
Write and . Using Claim 3, equation (12), and the observation that , we obtain the following inequality: ; see Appendix A.4 for details. Also, equation (11) gives us . Therefore, using a -approximation algorithm for the Nash social welfare maximization problem, one can distinguish between the YES and the NO cases of Gap 3-SAT-5. Since the latter problem is -hard, such an approximation algorithm does not exist, unless . That is, we obtain -inapproximability of maximizing Nash social welfare and, hence, Theorem 8 holds.
6 Hardness of Maximizing -Mean Welfare
In this section we prove that, for any fixed , it is -hard to find an allocation that maximizes the -mean welfare.
Recall that, in a cake-division instance , the -mean welfare of an allocation is defined as . Also, as mentioned previously, the range constitutes a family of functions that captures both average social welfare and Nash social welfare: gives us the arithmetic mean (social welfare) and, as tends to zero, the limit of is equal to the geometric mean (the Nash social welfare).
In contrast to the -hardness result for maximizing Nash social welfare (Theorem 8), our reduction for -mean welfare does not yield a cake-division instance with normalized valuations. That is, here we will consider cake-division instances wherein for some agents the total value of the cake is not necessarily equal to one. However, for the case (i.e., for average social welfare), one can obtain -hardness with normalized valuations–this entails a direct adaptation of the construction developed in Section 5.1.
The main result of this section is as follows
Theorem 9**.**
For each fixed , it is -hard to find allocations that maximizes the -mean welfare in cake-division instances with piecewise-constant valuations. Here, the agents’ valuations are not necessarily normalized over the cake.
**Proof ** We prove this theorem by developing a gap-preserving reduction from Gap 3-SAT-5 to the -mean welfare maximization problem. Here, the construction of a cake-division instance (from a Gap 3-SAT-5 instance) is quite similar to the one detailed in Section 5.1. Hence, we will primarily present the parts where the two constructions differ and omit the commonalities.
We start with an instance of the Gap 3-SAT-5 problem, comprising of a Boolean formula (in conjunctive normal form), such that—for a fixed constant —it is -hard to distinguish between the YES case ( is satisfiable) and the NO case (no assignment satisfies more than fraction of the clauses). As before, comprises of a conjunction of a set of clauses, , defined over Boolean variables .
From formula , we construct a cake-division instance which achieves the necessary gap-property for -mean welfare. We follow the construction detailed in Section 5.1 with the following changes
Remove the auxiliary interval and the auxiliary agent from the construction.282828Here, we do not impose normalization, i.e., do not enforce each agent’s value for the entire cake to be equal to one. Hence, in the current context, the auxiliary interval and auxiliary agent serve no purpose. Hence, the cake is obtained by concatenating the intervals, . 2. 2.
Modify the valuations (as defined in Section 5.1) for each of the remaining agents as follows: for an agent and subinterval (in interval ), let be the value considered in Section 5.1, e.g., . Here, we modify , for all , , and . For instance, we now have . Whenever an agent has a nonzero value for a subinterval, we keep the valuation (density) to be constant, i.e., we ensure that the resulting cake-division instance consists of piecewise-constant valuations.
In summary, we construct in polynomial-time a cake-division instance with separator agents, base agents and clause agents; hence . Observe that, with slight modifications in the arguments, Claim 2 continues to hold for the current construction.
To prove the theorem, we first consider the YES case, i.e., the case wherein is satisfiable. In this setting, there exists an assignment of the variables that satisfies all clauses in . Let denote the optimal -mean welfare in the cake-division instance . We follow a similar procedure as discussed in Theorem 8, to obtain the following upper bound:
[TABLE]
Next, we consider the NO case, i.e., under any assignment of the variables, at least clauses in remain unsatisfied. Let be a -mean optimal allocation (of ) which satisfies the properties stated in Claim 2.
Furthermore, note that Claim 3 continues to hold in the present context with the following modification: denote by the set of clause agents that receive a value of zero under the optimal allocation , i.e., . Write .292929In this construction, a clause agent can potentially receive a value of [math] even under an optimal allocation. This follows from the observation that in the current setup there does not exist an auxiliary interval that can be shared (as a fallback) among the clause agents to ensure that they receive strictly positive values. The set remains unchanged (as defined in Section 5.2), i.e., . The arguments presented in Claim 3 gives us the inequality .
Let denote the optimal -mean welfare in the cake-division instance , under the assumption that satisfies the NO case. We once again follow a similar procedure as discussed in Theorem 8 to obtain the following upper bound:
[TABLE]
Let \tau^{\prime}\coloneqq\Bigg{(}\frac{1}{3r+m}\Big{[}2r+r\frac{2^{\rho}}{4}+m\frac{1}{3}\Big{]}\Bigg{)}^{\frac{1}{\rho}}; see equation (13). For showing that the reduction is gap preserving, it suffices to bound the ratio by a constant, say . Towards this end, we analyze the th power of the ratio :
[TABLE]
With constant c(\alpha,\rho)\mathrel{\mathop{\mathchar 58\relax}}=\bigg{(}1-\frac{3\alpha(2^{\rho}-1)}{4(18+9\ 2^{\rho}+4)}\bigg{)}^{1/\rho}, inequality (15) can be restated as . Using this bound and equation (13), we obtain a (constant) multiplicative gap of between and .
Therefore, using a -approximation algorithm for the -mean welfare maximization problem, one can distinguish between the YES and the NO cases of Gap 3-SAT-5. Since the latter problem is -hard, such an approximation algorithm does not exist, unless . That is, we obtain -inapproximability of maximizing -mean welfare (with unnormalized valuations) and, hence, the theorem holds. \sqcap$$\sqcup
7 Approximating Nash Social Welfare with a Constant Number of Agents
This section shows that an -approximate solution (with ) for the Nash social welfare maximization problem (among agents) can be computed in time . In particular, for a constant number of agents and constant , we obtain a polynomial-time -approximation algorithm.
The high-level idea here is to first discretize the set of possible values that the agents can obtain in a Nash optimal allocation and then find a near-optimal solution via an exhaustive search over the discretized set.
Theorem 10**.**
For cake-division instances , with piecewise-constant valuations, and , there exists an algorithm that—in time —finds an -approximation to the Nash social welfare maximization problem.
**Proof ** Let denote a Nash optimal allocation for the given cake-division instance. Here, interval is assigned to agent . Also, let permutation denote the order in which the intervals s are assigned across the cake , i.e., under allocation , the interval assigned to agent is at the left end of the cake and, continuing on, agent receives the right-most interval.
To begin with, note that the Nash social welfare of a proportional allocation is at least and, hence, . This implies that for all agents . Therefore, for each agent , we have .303030Recall that for all . We discretize this range of values. Specifically, with , write and note that the cardinality of this set satisfies .
Next we observe that that there necessarily exists an allocation which satisfies and for all . In particular, consider the valuation vector and round down each component to the closest value in set . That is, for each agent , set . This definition ensures for each agent . Furthermore, note that following the order , we can find the desired allocation , i.e., establish the existence of an allocation wherein each agent receives an interval of value :313131The agent can potentially receive an interval of higher value, however this corner case does not affect the developed arguments. for agent consider the cut point such that . Then, we simply repeat this procedure for the remaining agents (in order ) and over the remaining cake .
The existence of implies that, by enumerating over all possible valuation vectors with components in and all permutations, we can find an allocation with Nash social welfare at least times the optimal. The number of valuation vectors induced by values in is at most , hence the time complexity of this exhaustive search is . Since , we obtain, for the Nash social welfare maximization problem, an -approximation algorithm that runs in time . \sqcap$$\sqcup
8 Price of Envy-Freeness
In this section we establish an upper bound on the price of envy-freeness for -mean welfare. The price of envy-freeness with respect to a welfare objective (such as social welfare or, more generally, -mean welfare) is defined as the ratio of the optimal value of the welfare objective among all possible divisions and the optimal value of the welfare objective among all envy-free divisions (i.e., the optimal value achieved under the envy-freeness constraint). Theorem 11 establishes an upper bound on the price of envy-freeness achieved by - allocations for -mean welfare, with and .
Note that, along these lines, Theorem 5 implies an upper bound of on the price of envy-freeness obtained by -EF allocations for Nash social welfare (i.e., for the case).
Furthermore, as a direct consequence of Theorem 11 and Theorem 2, we get that Alg provides an -approximate solution to maximizing -mean welfare for . For constant , this approximation factor is weaker than the one obtained in Theorem 7. However, the result obtained here is universal in the sense that a single allocation achieves the guarantee for all .
Theorem 11**.**
Let be an -approximately envy-free allocation in a cake-division instance , with . Then, for any , provides a -approximate solution to maximizing -mean welfare in .
**Proof ** Fix and let be an optimal allocation with respect to the -mean welfare. For , write to denote the set of intervals in the - allocation that intersect with , i.e., .323232Here, we follow the previously mentioned convention that mandates two intervals to be disjoint, if they intersect exactly at an endpoint. Let denote the cardinality of this set, .
Since is an allocation, we have . Therefore, for all agents , interval is covered by the union of intervals in ; . Also, the fact that is -approximately envy-free implies for all . Summing these inequalities and using the containment gives us333333Recall that the valuations are sigma additive. for all .
Furthermore, the normalization of valuations (), gives us for all .
Define a subset of players, . Note that ; here, the last inequality follows from a counting argument, which is detailed in the proof of Theorem 5. These inequalities imply the following upper bound on the size of : .
Considering the optimal -mean welfare value
[TABLE]
Note that , hence is a convex function on . The convexity of this function gives us . Simplifying we get .
We combine this observation with the bound obtained for the optimal -mean welfare
[TABLE]
Since is an - allocation, we have . That is, for all . Therefore, the -mean welfare of is at least , i.e., . We can hence write .
This inequality and equation (16) provide the desired upper bound on the optimal -mean welfare
[TABLE]
\sqcap$$\sqcup
9 Conclusions and Future Work
The current work studies cake-cutting from an algorithmic perspective and obtains approximation guarantees for multiple, well-studied notions of fairness and efficiency. In particular, we develop an efficient algorithm that computes -approximately envy-free allocations and, simultaneously, provides a -approximation to Nash social welfare. We complement this algorithmic result for Nash social welfare by proving that, in the cake-cutting context, maximizing this objective is -hard. Developing hardness results for (approximate) envy-freeness remains an interesting open problem.343434Since an envy-free cake division always exists, the hardness results here will be in terms of complexity classes contained in . Notably, the result of Deng et al. [14] shows that envy-free cake division (with connected pieces) is -hard, but this negative result holds under ordinal valuations–in this setup the preferences of each agent is specified via an explicit circuit which, given an allocation, identifies the agent’s most preferred piece. Therefore, in and of itself, the result of Deng et al. [14] does not imply that envy-free cake division under cardinal valuations is -hard; complementarily, this result does not rule out an FPTAS for the contiguous-pieces version of envy-free cake-cutting under, say, piecewise-constant valuations.
Our approximation guarantee for -mean welfare degrades as tends to zero. Indeed, it does not match the approximation ratio achieved specifically for Nash social welfare. Tightening this gap is another interesting direction for future work. Computational results for maximizing -mean welfare, with , will also be interesting. The case is particularly relevant, since it corresponds to egalitarian welfare, i.e., to the max-min (Santa Claus) objective. The work of Aumann et al. [2] proves that, in the cake-division framework, it is -hard to approximate egalitarian welfare within a factor of two. However, it remains open whether this problem admits a nontrivial approximation algorithm.
Acknowledgements
Siddharth Barman gratefully acknowledges the support of a Ramanujan Fellowship (SERB - SB/S2/RJN-128/2015) and a Pratiksha Trust Young Investigator Award.
Appendix A Omitted Proofs from Section 5.2
A.1 Proof of Claim 2
See 2
**Proof ** We will show that, independent of the underlying case for (YES or NO), the constructed cake-division instance admits a Nash optimal allocation, which satisfies the properties mentioned in the claim.
Property (iii) can be established by noting that the following partial allocation has positive Nash social welfare: for all , allocate subinterval to agent , subinterval to agent , and to agent . Say literal appears in the clause and, for , is the th positive occurrence of . In this case, we allocate subinterval to clause agent . In the complementary setting, if literal appears in the clause (with being the th negative occurrence of variable ), then we allocate the subinterval to . Note that, in both cases, the clause agent obtains a positive value under the partial allocation. Finally, assign interval to the auxiliary agent . These allocations lead to a well-defined partial allocation wherein every agent receives a positive value, i.e., the partial allocation has positive Nash social welfare. Since the valuations of the agents are nonnegative, this partial allocation can be extended to a full allocation without reducing the value of any agent. Hence, every Nash optimal allocation satisfies property (iii).
Let be a Nash optimal allocation in the cake-division instance . Using , we will define a different Nash optimal allocation, , that satisfies properties (i) and (ii).
By property (iii), we have that for all agents . Hence, for all , we have and —agent () has nonzero valuation (density) only within the subinterval (). This observation implies that for all , the interval assigned to the base agent (i.e., ) satisfies one of the following cases
intersects with exactly one of and . In this case, we set . 2. 2.
intersects with both and . In this case, we set . 3. 3.
intersects with exactly one of and . In this case, we set . 4. 4.
intersects with both and . In this case, we set .
Hence, case-wise, we have defined the interval assigned to base agent (i.e., defined ) in the allocation . In addition, for all , set and . One can verify that, for all , we have , and . That is, these modifications in the Nash optimal allocation do not reduce the values obtained by the base agents and the separator agents.
Let denote the subset of the cake that has been already allocated to the separator and base agents under , i.e., ). Write to denote . For each clause agent (with ) set interval . Note that is indeed an interval. From the construction of , we know that clause agents do not value any interval contained in . Hence, for all . Similarly, for the auxiliary agent, set (for the auxiliary interval , we have ) and note that . Therefore, ) and, hence, is a Nash optimal allocation that satisfies all the properties stated in the claim. \sqcap$$\sqcup
A.2 Proof of Claim 3
We consider this claim when the given Boolean formula satisfies the NO case. Here, is a Nash optimal allocation in the cake-division instance and satisfies the properties in Claim 2. Also, recall that and , with and .
See 3
**Proof ** Using , we will define a different allocation, denoted by , which will be used to extract an assignment to the Boolean variables in .
For all , set and . In addition, for , set . On the other hand, for , set if and set if . That is, for every base agent indexed in , we enlarge the interval to cover the entire positive part of or the entire negative part of . Also, for the auxiliary agent , assign .
Using this, we consider the set of clause agents s whose initial allocations, s, are now contained in the enlarged allocations of the base agents; specifically, write . Note that, for every , we have an intersection , for some base agent . Also, following the definition of , we get , for all . To resolve these intersections, for each , we set . Complementarily, for , set . It can be verified that is a well-defined allocation and under it each base agent receives either the entire positive part or entire the negative part of .
Note that the clause agents indexed in are forced to receive an empty allocation and the number of such agents (i.e., ) is at most . This upper bound follows from the fact that, for any , the containment holds for at most four clause agents s–recall that for all (property (iii) in Claim 2) and, hence, if this containment holds for a , then it must be the case that literal occurs in clause . The number of occurrences of the literal is at most four. In other words, only the four possible clause agents (with a nonzero value for one of the four subintervals ) can be forced to receive an empty interval when is set to be the entire positive side of (i.e., when we set ) starting with . An identical argument holds when is assigned the negative part of (i.e., under the assignment ) starting with . Therefore, for each , updating the allocation of base agent (from to ) results in inclusion of at most four clause agents in . Hence, .
Based on , we define a Boolean assignment to the variables in , as follows
[TABLE]
Observe that, by construction of , is defined for all and, for all , we have . Furthermore, observing that, for each such , the interval does not intersect we obtain the following useful fact: for each , the assigned interval is either contained in the positive part of with (and literal occurring in clause ) or is contained in the negative part of with (and literal occurring in clause ). Hence, for every index , the clause is satisfied by the assignment .
Given that we are in the NO case, the number of satisfied clauses is at most . Therefore, the cardinality of the set is at most . That is, . Using the above-mentioned upper bound on the size of the set (i.e., ), we obtain the desired inequality . \sqcap$$\sqcup
A.3 Proof of Claim 4
Recall that this claim is considered when the given Boolean formula, , satisfies the NO case. As before, is the constructed cake-division instance and is a Nash optimal allocation (in ) which satisfies the properties in Claim 2.
Furthermore, denotes the (index) set of the clause agents that share the auxiliary interval with the auxiliary agent ; and .
See 4
**Proof ** For an upper bound, it suffices to consider the case in which, for all , the density of the clause agent within the auxiliary interval is as high as possible, i.e., for all , we have and, by construction, this value is constant within .
By symmetry, we get that the product is maximized when the clause agents (indexed in ) are allocated intervals of the same length, say . Recall that the total length of the auxiliary interval is equal to one. Hence, under the constraint that the clause agents indexed in are assigned intervals of length , we get that the length of the interval allocated to the auxiliary agent is equal to . Since the valuation (density) of agent is constant and equal to one within , the value obtained by is equal to . Therefore,
[TABLE]
Here, the optimal value is achieved at . Therefore, the stated claim holds.
\sqcap$$\sqcup
A.4 Proof of the bound
Recall that and . Also, from equation (12), we have
[TABLE]
Dividing by and considering the th power, we get
[TABLE]
Here, the last inequality follows from the fact that is a non-increasing function of and . Additionally, the inequality gives us .
Recall that in any instance of the Gap 3-SAT-5, the number of variables is at most three times the number of clauses, . Therefore,
[TABLE]
Exponentiating both sides of the previous inequality to the power , we obtain the desired inequality .
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1AD [10] Yonatan Aumann and Yair Dombb. The efficiency of fair division with connected pieces. In International workshop on internet and network economics , pages 26–37. Springer, 2010.
- 2ADH [13] Yonatan Aumann, Yair Dombb, and Avinatan Hassidim. Computing socially-efficient cake divisions. In Proceedings of the 2013 international conference on Autonomous agents and multi-agent systems , pages 343–350. International Foundation for Autonomous Agents and Multiagent Systems, 2013.
- 3[3] Adjusted winner. http://www.nyu.edu/projects/adjustedwinner/ . Accessed: 2019-07-07.
- 4AKK [99] Sanjeev Arora, David Karger, and Marek Karpinski. Polynomial time approximation schemes for dense instances of np-hard problems. Journal of computer and system sciences , 58(1):193–210, 1999.
- 5ALM + [98] Sanjeev Arora, Carsten Lund, Rajeev Motwani, Madhu Sudan, and Mario Szegedy. Proof verification and the hardness of approximation problems. Journal of the ACM (JACM) , 45(3):501–555, 1998.
- 6AM [16] Haris Aziz and Simon Mackenzie. A discrete and bounded envy-free cake cutting protocol for any number of agents. In 2016 IEEE 57th Annual Symposium on Foundations of Computer Science (FOCS) , pages 416–427. IEEE, 2016.
- 7AY [14] Haris Aziz and Chun Ye. Cake cutting algorithms for piecewise constant and piecewise uniform valuations. In International Conference on Web and Internet Economics , pages 1–14. Springer, 2014.
- 8BCH + [12] Xiaohui Bei, Ning Chen, Xia Hua, Biaoshuai Tao, and Endong Yang. Optimal proportional cake cutting with connected pieces. In Twenty-sixth AAAI Conference on Artificial Intelligence , 2012.