Distributed Kalman Filtering under Model Uncertainty
Mattia Zorzi

TL;DR
This paper develops a distributed Kalman filter that is robust to model uncertainties within a specified Kullback-Leibler ball, enhancing sensor network performance under mismatch conditions.
Contribution
It introduces a novel distributed Kalman filtering algorithm with diffusion steps that accounts for model uncertainty and derives its worst-case performance.
Findings
The proposed filter is robust against model mismatch.
Numerical examples demonstrate improved performance under uncertainty.
The method effectively handles uncertainty within a Kullback-Leibler ball.
Abstract
We study the problem of distributed Kalman filtering for sensor networks in the presence of model uncertainty. More precisely, we assume that the actual state-space model belongs to a ball, in the Kullback-Leibler topology, about the nominal state-space model and whose radius reflects the mismatch modeling budget allowed for each time step. We propose a distributed Kalman filter with diffusion step which is robust with respect to the aforementioned model uncertainty. Moreover, we derive the corresponding least favorable performance. Finally, we check the effectiveness of the proposed algorithm in the presence of uncertainty through a numerical example.
Click any figure to enlarge with its caption.
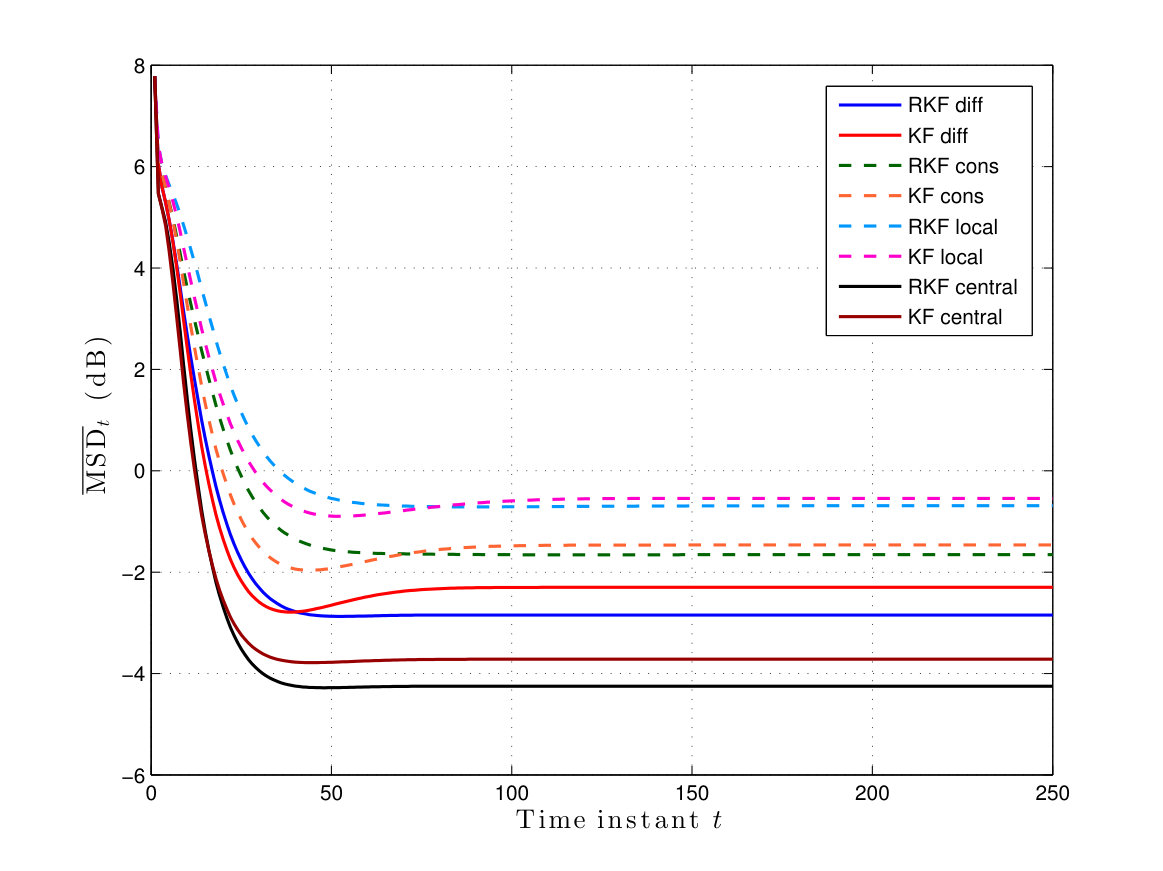 Figure 1
Figure 1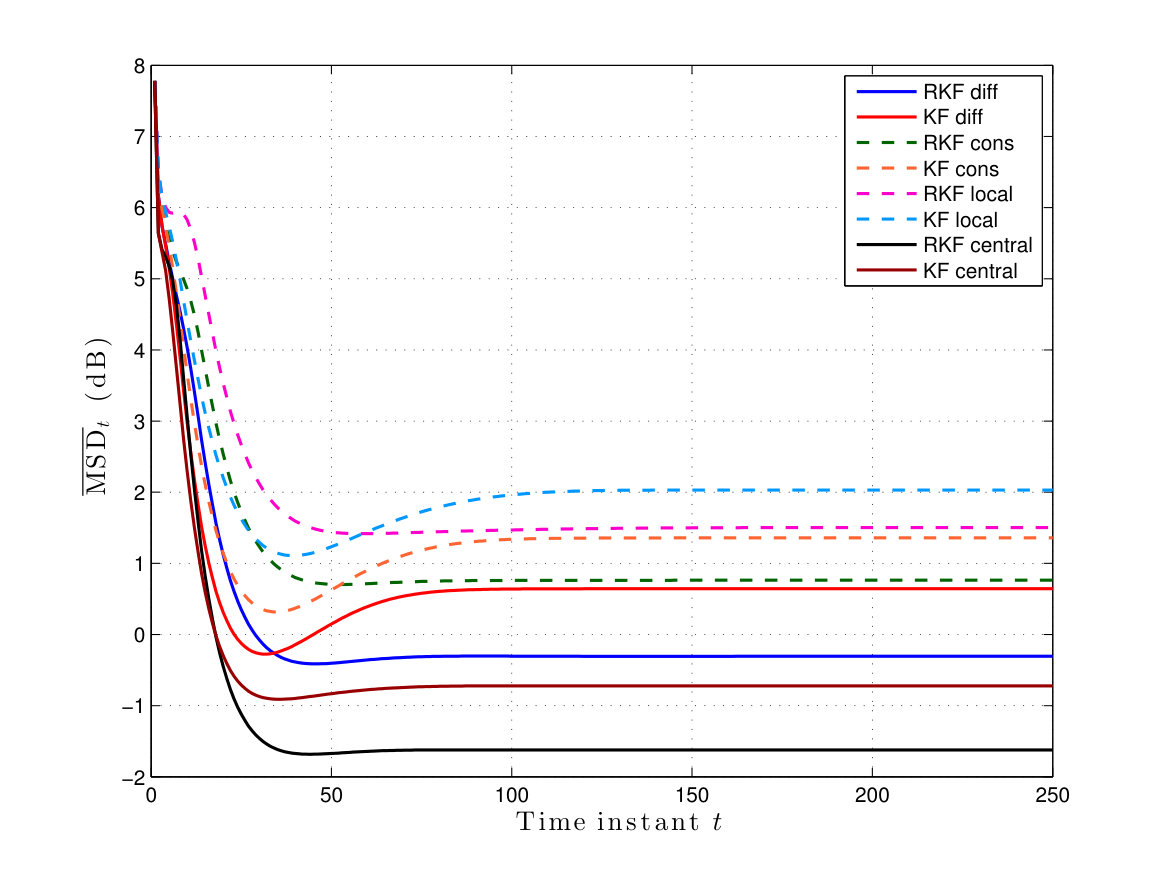 Figure 2
Figure 2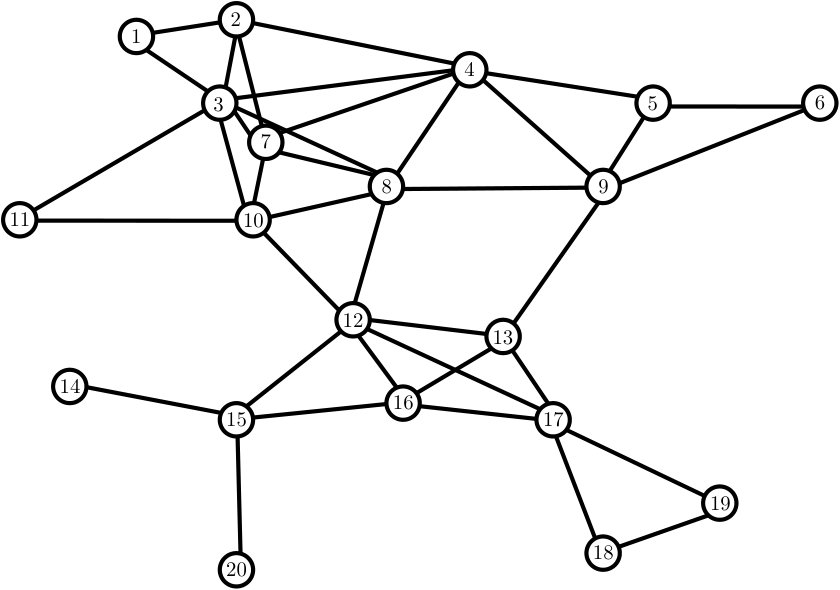 Figure 3
Figure 3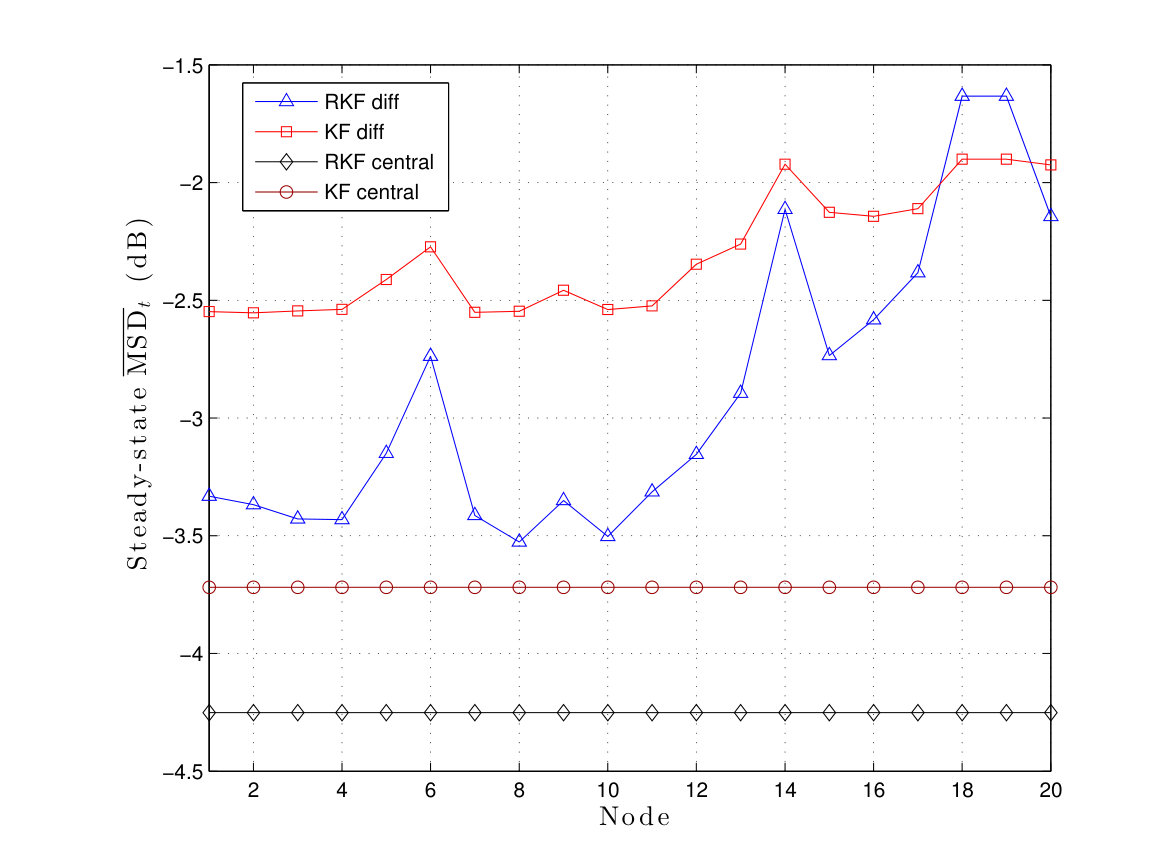 Figure 4
Figure 4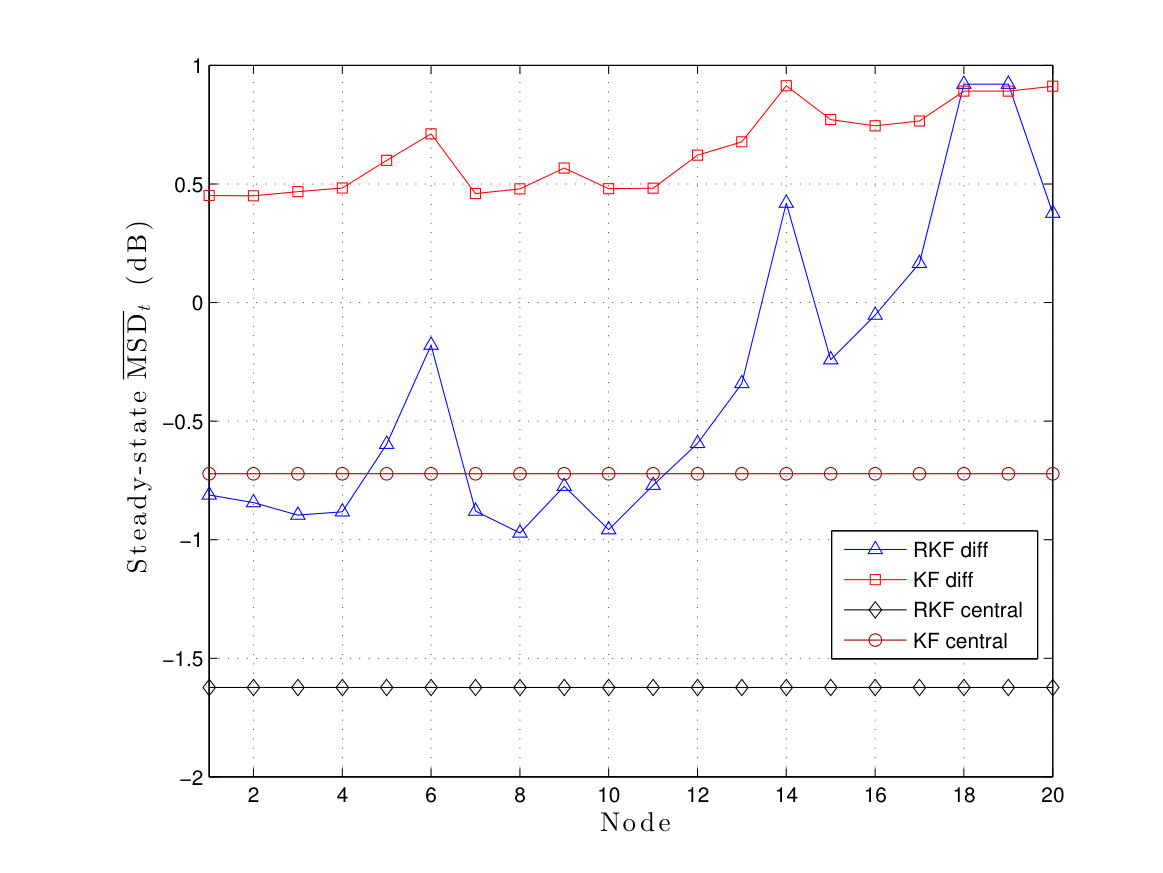 Figure 5
Figure 5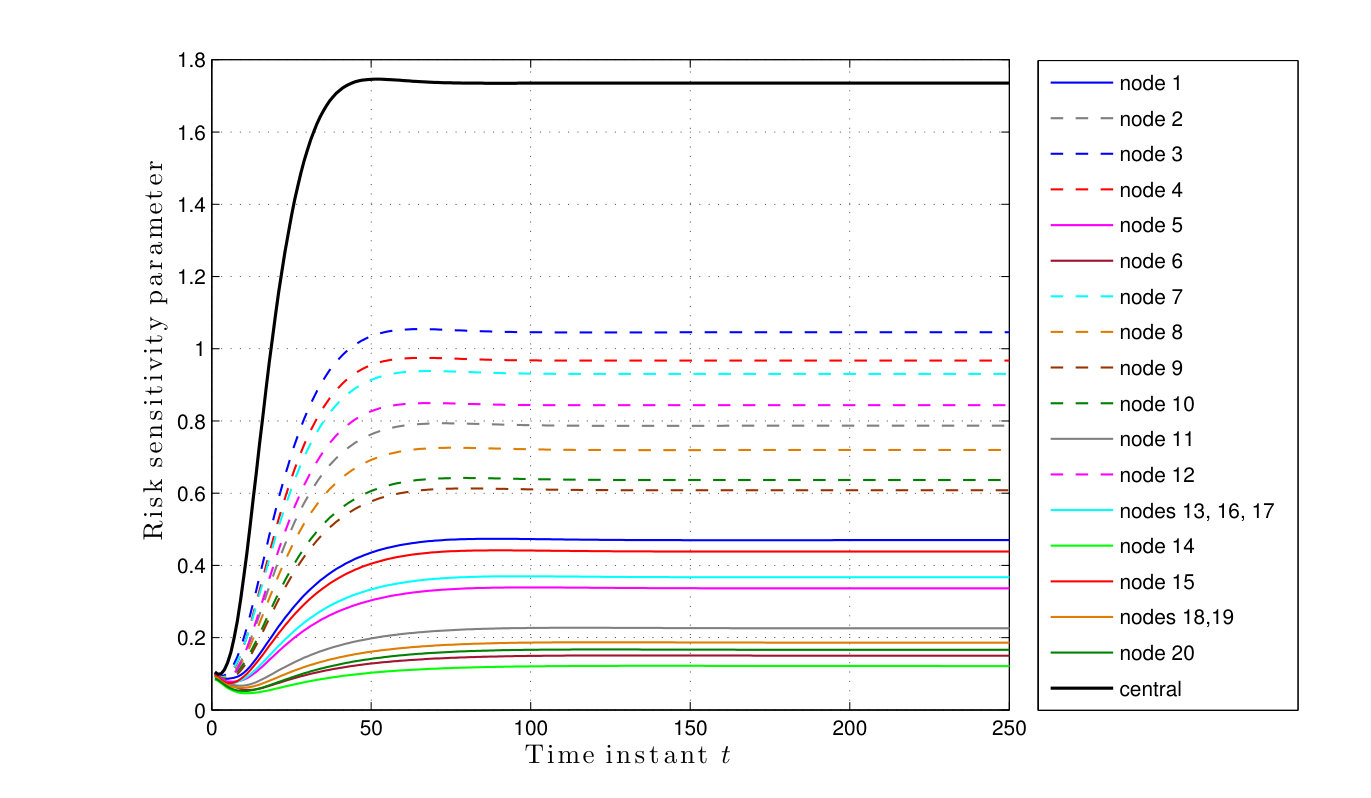 Figure 6
Figure 6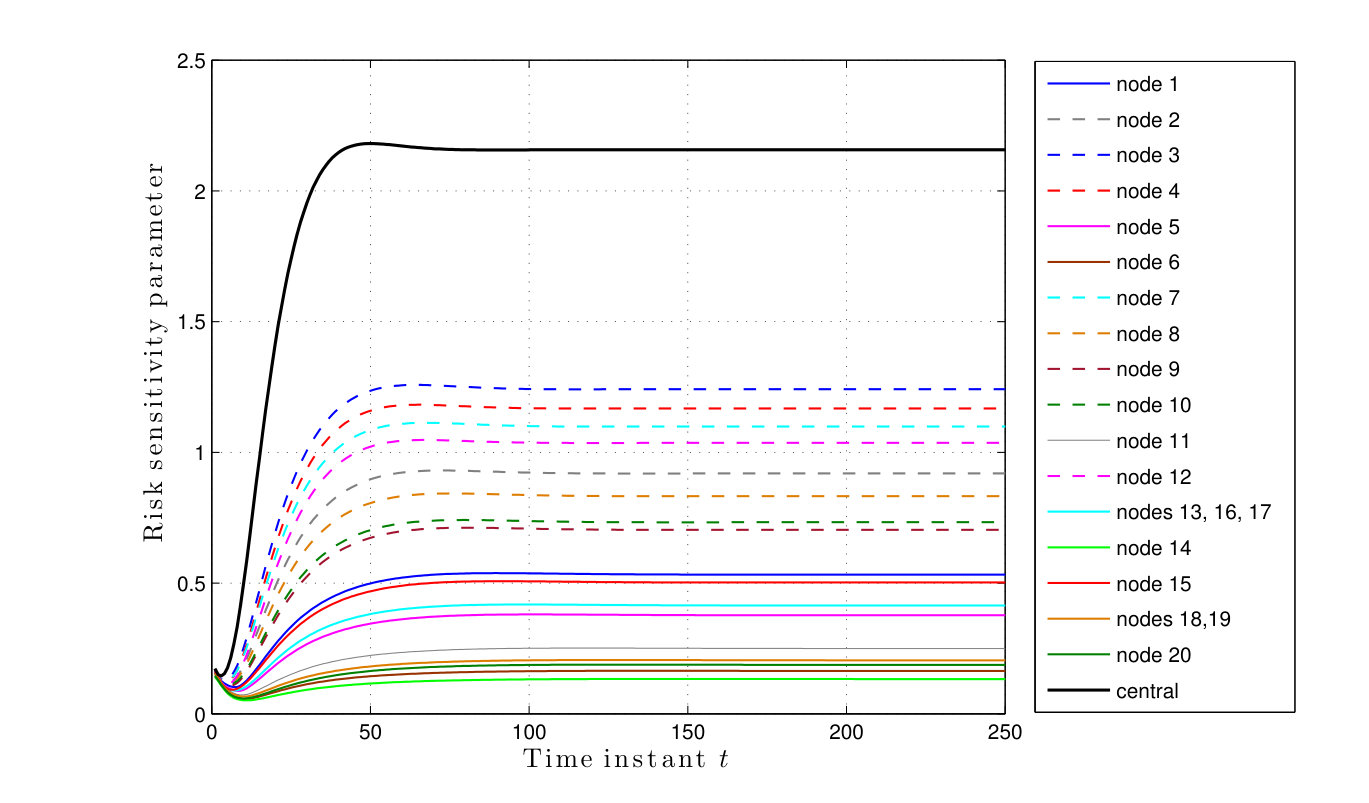 Figure 7
Figure 7Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Distributed Kalman Filtering
under Model Uncertainty
Mattia Zorzi M. Zorzi is with the Department of Information Engineering, University of Padova, Padova, Italy; e-mail: [email protected] .
Abstract
We study the problem of distributed Kalman filtering for sensor networks in the presence of model uncertainty. More precisely, we assume that the actual state-space model belongs to a ball, in the Kullback-Leibler topology, about the nominal state-space model and whose radius reflects the mismatch modeling budget allowed for each time step. We propose a distributed Kalman filter with diffusion step which is robust with respect to the aforementioned model uncertainty. Moreover, we derive the corresponding least favorable performance. Finally, we check the effectiveness of the proposed algorithm in the presence of uncertainty through a numerical example.
Index Terms:
Distributed robust Kalman filtering, sensor networks (SNs), least favorable analysis.
I Introduction
Significant advances in science and technology have led to a large number of problems that involve numerous sensors, i.e. a sensor network (SN), taking measurements and a state process which needs to be estimated from such measurements. Just to mention a few of these problems: area surveillance, region monitoring, target tracking and electrical power grid analysis. These problems can be (in principle) solved by using Kalman filtering equipped with all the observations coming from the SN. On the other hand, such centralized strategy is impractical or impossible to implement. Indeed, it requires a large amount of energy for communications among the central node, i.e. the one which computes an estimate of the state process, and the sensors. In order to overcome this difficulty, distributed strategies have gained rapidly increasing interest in the last few years, see for instance [distr_cons_TCN18, distr_joint_TCN15, av_stateobs_TCN17, fully_distr_TCN18]. The latter represent an attractive alternative because they require fewer communications and allow parallel processing. The simpleminded distributed version of the Kalman filter assumes that each node can compute an estimate of the state by using only the observations coming from its neighbors. On the other hand, such an approach provides poor performances compared to the ones of the centralized approach. A remarkable improvement has been gained by the so called consensus-based distributed Kalman filters [spanos2005, Saber_CDC2005, Saber_CDC2007, Carli2008]. Such approaches require multiple communication iterations during each sampling time interval: for instance, in the first iteration the nodes exchange their observation and compute their local estimate; in the second iteration the nodes exchange their local estimates and construct the final estimate based on consensus schemes. A further improvement has been given by diffusion-based strategies, [cattivelli2010, yang2016diffusion], wherein the consensus law is replaced by a convex combination of the local estimates. It is worth noting that there also exist high performing distributed Kalman filters based on different principles. For instance it is possible to compute the estimate through a fusion center which merges the local estimates of the nodes, [song2007optimal, xu2012optimal, SUN20041017, doi:10.1080/00207721.2010.502601].
Kalman filtering is based on nominal state-space models. On the other hand, the latter are just an approximation of the underlying system, thus the resulting estimate could lead to poor performances in practice. To address this model uncertainty issue many robust Kalman filtering strategies have been proposed. The most popular one is risk-sensitive filtering, [boel2002robustness, ROBUSTNESS_HANSENSARGENT_2008], wherein large errors are severely penalized according to the so called risk sensitivity parameter: the larger the latter is the more large errors are penalized. Here, we consider the robust Kalman filter introduced by Levy and Nikoukhah [LEVY_NIKOUKHAH_2004, ROBUST_STATE_SPACE_LEVY_NIKOUKHAH_2013]. In such approach, the actual state space model belongs to a ball, according to the Kullback-Leibler divergence, about the nominal model and with radius, say tolerance, which represents the mismatch modeling budget allowed for each time step. Then, the optimal estimator is designed according to the least favorable model in this ball. It is turns out that the latter obey to a Kalman-like recursion. Furthermore, it can be understood as a generalization of risk-sensitive filtering: such a filter can be rewritten as a risk-sensitive filter with a time varying risk-sensitivity parameter. Finally, it worth noting that the aforementioned approach can be extended to a family of balls formed by using the -divergence, [OPTIMALITY_ZORZI, STATETAU_2017].
It is then natural to wonder how to perform distributed Kalman filtering for SNs in the presence of model uncertainty. Many papers consider model uncertainty in terms of missing observations. Such a situation well describes communication problems among sensors: for instance, an -consensus problem for SNs with multiple missing measurements has been considered in [SHEN20101682]. On the other hand, only few papers addressed the problem of model uncertainty in a broader sense to the best of the author’s knowledge. For instance, a distributed Kalman filtering fusion strategy with random state transition and measurements matrices has been considered in [Luo_2008].
The contribution of the present is about distributed Kalman filtering for SNs wherein the model uncertainty is characterized by a ball, in the Kullback-Leibler divergence topology, about the nominal model. More precisely, we propose a distributed version of the robust Kalman filter introduced by Levy and Nikoukhah. The proposed algorithm is a robust version of the distributed Kalman filter with diffusion step in [cattivelli2010]. Then, we derive the least favorable performance of these filters. Similarly to the centralized case, the latter can be characterized over a finite simulation horizon as follows: first, a forward recursion is required to compute the optimal gains of centralized Kalman filter; then, a backward recursion is required to compute the least favorable model; finally, a forward recursion is required to compute the performance of the distributed robust Kalman algorithm. We show that the average least favorable mean square deviation across the network converges to a finite constant value provided that: the tolerance is sufficiently small; reachability and local observability hold. Moreover, we show that it is very likely that the proposed robust distributed filters perform better than the standard ones provided that the tolerance is sufficiently large. Finally, we compare the proposed algorithms with the standard ones through a numerical example.
The outline of the paper is as follows. In Section II we introduce the background about robust Kalman filtering. In Section III we present the distributed robust Kalman filtering algorithm. In Section IV we analyze the least favorable performance of the proposed algorithms. In Section LABEL:sec_num we present a numerical example which compares the proposed algorithm with the standard ones. Finally, in Section LABEL:sec_concl we draw the conclusions.
II Background
Consider the nominal state-space model
[TABLE]
where is the state process, is the observation process, is normalized white Gaussian noise (WGN), i.e. where denotes the Kronecker delta function. We assume that is independent of the initial state . The latter is Gaussian distributed with mean and covariance matrix . Model (II) is characterized by the nominal transition probability density of given which is denoted by . We assume that , i.e. the noise entering in the state process is independent of the noise entering in the observation process. We assume that affects all the components of the dynamics and observations in (II). Such assumption is necessary whenever entropy-like indexes are used to measure the proximity of statistical models, as in our case, otherwise these indexes take infinite value. Accordingly, the matrix is full row rank, and without loss of generality we can assume that is a square (and thus invertible) matrix of dimension . Indeed, we can always compress the column space of such a matrix and remove the noise components which do not affect model in (II). Accordingly, the state-space model in (II) is reachable; moreover we also assume it is observable.
Let be the (unknown) actual transition probability density of given . In order to account the fact that the nominal model does not coincide with the actual model, we assume that belongs to the closed ball about :
[TABLE]
where
[TABLE]
and . The latter represents the relative entropy between the actual and the nominal transition densities and at time , respectively, and is the actual conditional probability density of given the past observations . Finally, parameter is called tolerance and represents the mismatch modeling budget allowed for each time step.
Given the nominal model in (II), a robust estimator of given is obtained by solving the following mini-max problem
[TABLE]
where
[TABLE]
represents the mean square error of the estimator which is a function of and . denotes the set of all estimators such that is finite for any . Roughly speaking, such estimator is designed according to the least favorable model whose mismodeling budget allowed is expressed at each time step. This way to characterize model uncertainty is better than expressing the uncertainty over the entire simulation interval. Indeed, in the latter case the maximizer has the possibility to identify the moment where the dynamic of model (II) is most susceptible to distortion and to allocate most of the distortion budget specified by the tolerance to this single element of the model, that is a situation which is pretty unrealistic.
In [ROBUST_STATE_SPACE_LEVY_NIKOUKHAH_2013] it has been proved that the estimator solving the mini-max problem (4) obeys the Kalman-like recursion:
[TABLE]
where
[TABLE]
The so called risk sensitivity parameter, [LEVY_ZORZI_RISK_CONTRACTION], does always exist and it is unique given and , moreover it can be computed efficiently by using a bisection algorithm. In the limit case , i.e. there is no uncertainty, then and (II) becomes the usual Kalman filter.
Remark 1
The robust filtering paradigm in (4) can be extended to nominal state-space models with time-varying parameters and tolerance. On the other hand, to ease the introduction of the corresponding distributed algorithms we stick to the constant parameters and tolerance case.
III Distributed Robust Kalman filter
Consider a network of nodes and in each node there is one sensor. We say that two nodes are connected if the corresponding sensors can communicate directly with each other. A node is always connected with itself. The neighborhood of node , i.e. the set of nodes connected with , is denoted by , in particular . The corresponding adjacency matrix is defined as
[TABLE]
The number of neighbors of node is denoted by . Every node at time collects a measurement whose underlying model is unknown. The nominal model takes the form:
[TABLE]
where and are independent WGNs such that , and . It is worth noting that (III) can be rewritten as (II) with , , , , ,
[TABLE]
where is the linear operator which constructs a block diagonal matrix whose blocks are the ones specified in the argument. We also define , with , and
[TABLE]
Accordingly, the filtering gain for model (III) can be written as
[TABLE]
and thus
[TABLE]
In distributed Kalman filtering under model uncertainty, the aim is to compute for every node a prediction of the state while sharing the data only with its neighbors and taking into account that (III) does not coincide with the actual model. In what follows, the one step-ahead prediction of at node is denoted by . It is not difficult to see that the robust Kalman filter for model (III), i.e. the node has access to all measurements across all the nodes in the network, can be written as
[TABLE]
where and with .
Therefore in the case that the node has not access to all measurements across all nodes in the network, we would obtain a state prediction of which is as close as to the global state prediction.
III-A Robust Kalman filter with diffusion step
We assume that a node has access to the measurements of its neighbors . The corresponding nominal state-space model is
[TABLE]
The latter can be rewritten as a state-space model with input noise and output where and are obtained by stacking and , respectively, with . Moreover, , is obtained by stacking with , and is a block diagonal matrix whose main blocks are with . We also define , and thus
[TABLE]
Accordingly, the one-step ahead predictor of at node is given by (III) where the terms for which are discarded. Then, the local prediction can be understood as an intermediate local prediction of at node . In what follows we denote such intermediate prediction as . Then, the idea is to update the prediction at node not only in terms of , but also in terms of with . More precisely, we consider a matrix such that
[TABLE]
Then, the final prediction at node is obtained by the so called diffusion step, [cattivelli2010]:
[TABLE]
Therefore, in the diffusion algorithm a node exploits the information of the neighbors in terms of and . The resulting procedure is outlined in Algorithm 1.
As explained in [cattivelli2010], the diffusion step (21) is motivated by the fact that the centralized prediction can be approximated by a local convex combination of . It is worth noting that in the case that , i.e. there is no mismatch between the actual and the nominal model, then for any and so that, we obtain the diffusion algorithm proposed in [cattivelli2010]. In the case that
[TABLE]
we obtain a consensus-based update where is the consensus parameter. Indeed, in the case that and is designed as in (25) we obtain the distributed consensus-based algorithm proposed in [Saber_CDC2007]. Finally, in the case that we obtain the robust version of the local Kalman filter [KAILATH_OPTIMAL_FILTERING, p. 329].
It is worth noting that the mismatch modeling budget in Algorithm 1 coincides with the one of the centralized filter. Such a choice does not guarantee that the least favorable model computed at node coincides with the one of the centralized filter. On the other hand, we will see that, under large deviations of the least favorable model of the centralized problem, it is very likely that the predictor at node using Algorithm 1 performs better than the one in [cattivelli2010], see Section LABEL:sec_opt for more details.
Remark 2
In some cases we may have a state-space model of the form
[TABLE]
where is a deterministic process. In [RS_MPC_IET] it was shown that the corresponding centralized robust Kalman filter still obeys the Kalman-like recursion (II) where the prediction update is replaced by
[TABLE]
Then, it is not difficult to see that the distributed algorithms presented in this section still hold in this case. The unique difference is that we need to add in the prediction update of each node the term .
IV Least favorable performance
In this section we analyze the performance of the distributed algorithm with diffusion step introduced in Section III under the least favorable model which is solution of the mini-max problem (4), i.e. the centralized problem. The performance assessment is given by the mean and variance of the least favorable state prediction error for each node (including the diffusion step), say with . In [ROBUST_STATE_SPACE_LEVY_NIKOUKHAH_2013, STATETAU_2017] it has been shown that the least favorable model can be characterized over a finte interval and it takes the following form:
[TABLE]
where , is the least favorable state process, is the least favorable prediction error of using the robust filter (II) and is WGN with covariance matrix equal to the identity. Moreover,
[TABLE]
where is such that ,
[TABLE]
Matrix is computed from the backward recursion
[TABLE]
where the final point is initialized with and is the simulation horizon. Therefore, to construct the least favorable model we need to compute the gain performing a forward sweep of the robust Kalman filter in (II) over the interval , then we generate the matrices through a backward sweep over the interval . We partition and as and with , , and . Moreover, we partition and as follows:
[TABLE]
where and .
Next we express the least favorable state prediction error at node in terms of the WGN : in this way we will be able to characterize the mean and the variance of . We define
[TABLE]
which represent the prediction error and the intermediate prediction error, respectively, at node at time . Notice that
[TABLE]
for .
Therefore, we have
[TABLE]
where we recall that if , otherwise . Notice that,
[TABLE]
where we have exploited (III-A). Taking into account (IV), we have
[TABLE]
By defining
[TABLE]
we can rewrite (IV) in the following compact way:
[TABLE]
and thus
[TABLE]
where denotes the vector of ones. We rewrite the latter as
[TABLE]
where
[TABLE]
Combining (51) with the model for in (IV), we obtain:
[TABLE]
where ,
[TABLE]
From (53), we can analyze the performance of the distributed Algorithm 1. Taking the expectation of (53), we obtain
[TABLE]
Since is the mean of and for , we have that . Accordingly, is a random vector with zero mean for any . This means that the distributed Kalman predictions with diffusion step are unbiased.
We proceed to analyze the variance of the prediction errors. We define . Since is WGN with covariance matrix equal to the identity, by (53) we have that is given by solving the following Lyapunov equation
[TABLE]
We partition as follows:
[TABLE]
where , and . The matrices in the main block diagonal of represent the covariance matrices of the estimation error at each node. Let denote the least favorable mean square deviation at node and at time . Then, the average least favorable mean square deviation across the network at time is
[TABLE]
The computation of the sequence depends on the simulation horizon . In particular, it is required to perform three steps:
- •
compute the filtering gain performing a forward sweep of the centralized robust Kalman filter in (II) over the interval
- •
compute performing the backward recursion (IV) over the interval
- •
compute performing a forward sweep of the Lyapunov equation in (61) over the interval .
IV-A Convergence analysis
In the previous section we showed how to compute over the simulation horizon . Let . We show that under reachability and local observability, and choosing the tolerance sufficiently small, then converges over the interval as approaches infinity, and thus the prediction errors at each node have zero mean and finite constant variance in steady state. It is worth noting that local observability is a strong assumption which may pose some limits on the practical applicability of the distributed robust Kalman filter.
In [zorzi2018lf] it has been shown that the least favorable prediction error using an estimator of type , where coincides with the one in the least favorable model, has zero mean and convergent covariance matrix provided that is sufficiently small. However, these results cannot be directly applied to our case because the predictor at node is given by a convex combination of local estimators whose matrix does not coincide with the one of the least favorable model.
The update of the intermediate local prediction can be rewritten as
[TABLE]
where
[TABLE]
is the filtering gain at node . The first step is to show that converges as approaches infinity.
Proposition IV.1
Assume that the pair is reachable and that the pair is observable for every . Then, there exists sufficiently small such that for any the sequence generated by Algorithm 1 at node converges to a unique solution . Furthermore, , and the limit of the filtering gain is such that is Schur stable. Moreover, is the unique solution of the algebraic Riccati-like equation
[TABLE]
Proof:
The convergence of the local robust Kalman filter follows from the convergence result of the robust Kalman filter in [ZORZI_CONTRACTION_CDC, Proposition 3.5], see also [CONVTAU], under the assumption that the local state space model is reachable and observable. ∎
Regarding the least favorable model in (IV), it is possible to prove that it does converge to a state space model with constant parameters, as the simulation horizon tends to infinity.
Proposition IV.2** (Zorzi, Levy [zorzi2018lf])**
Assume that the pair is reachable and that the pair is observable. Then, there exists sufficiently small such that:
- •
the forward sequences and , , of the centralized robust Kalman filter (II) converges to and , respectively, as tends to infinity;
- •
when the simulation horizon tends to infinity, the backward sequence generated by (IV), with the steady state parameters and of the centralized robust Kalman filter, converges to . Furthermore,
[TABLE]
and is Schur stable.
Finally, we need of the following result.
Proposition IV.3** (Cattivelli, Sayed [cattivelli2010])**
Consider the time-varying Lyapunov equation
[TABLE]
where and converges to and , respectively, as , with Schur stable. Then, converges to the unique solution of the Lyapunov equation:
[TABLE]
We are ready to prove the main convergence result.
Proposition IV.4
Assume that the pair is reachable and that the pair is observable for every . Then, there exists sufficiently small such that for any and the sequence , , generated by (61) converges to , and over as . Moreover, is the unique solution of
[TABLE]
and is Schur stable. Therefore, the average least favorable mean square deviation across the network does converge over as .