Resilient Leader-Follower Consensus to Arbitrary Reference Values in Time-Varying Graphs
James Usevitch, Dimitra Panagou

TL;DR
This paper introduces resilient algorithms for leader-follower consensus in time-varying networks, enabling normal agents to track arbitrary reference states despite adversarial behavior, with demonstrated simulation results.
Contribution
It proposes novel methods for resilient leader-follower consensus in dynamic graphs, allowing tracking of external references beyond initial convex hulls, even with adversarial agents.
Findings
Agents can resiliently track arbitrary reference states.
The proposed algorithms work in time-varying graph topologies.
Simulations confirm effectiveness under adversarial conditions.
Abstract
Several algorithms in prior literature have been proposed which guarantee consensus of normally behaving agents in a network that may contain adversarially behaving agents. These algorithms guarantee that the consensus value lies within the convex hull of initial normal agents' states, with the exact consensus value possibly being unknown. In leader-follower consensus problems however, the objective is for normally behaving agents to track a reference state that may take on values outside of this convex hull. In this paper we present methods for agents in time-varying graphs with discrete-time dynamics to resiliently track a reference state propagated by a set of leaders despite a bounded subset of the leaders and followers behaving adversarially. Our results are demonstrated through simulations.
Click any figure to enlarge with its caption.
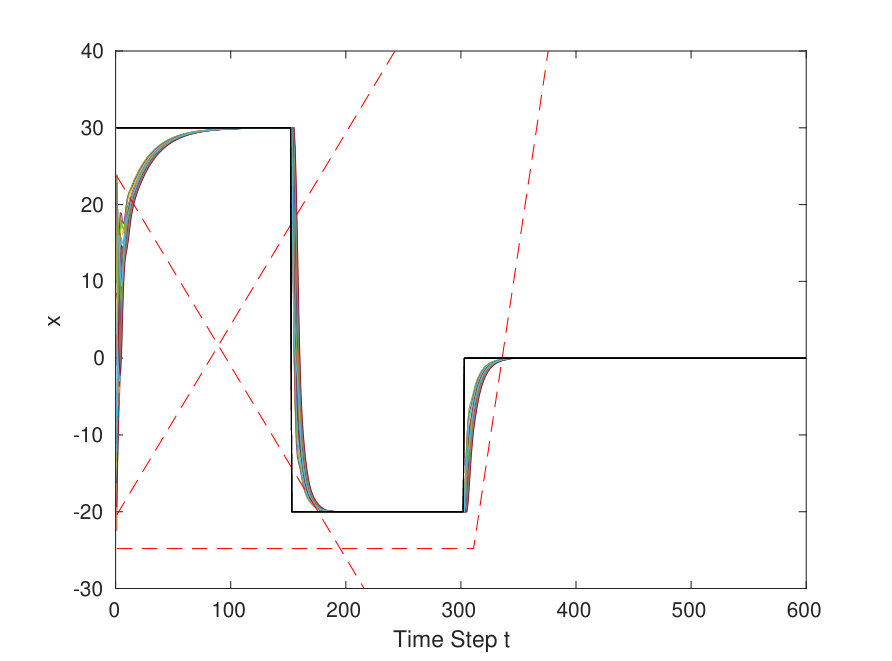 Figure 1
Figure 1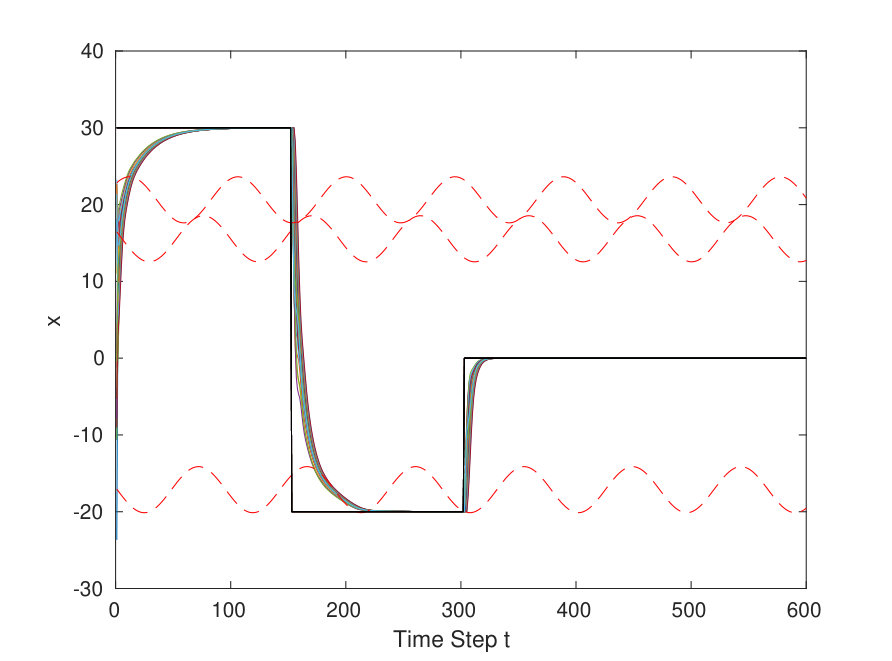 Figure 2
Figure 2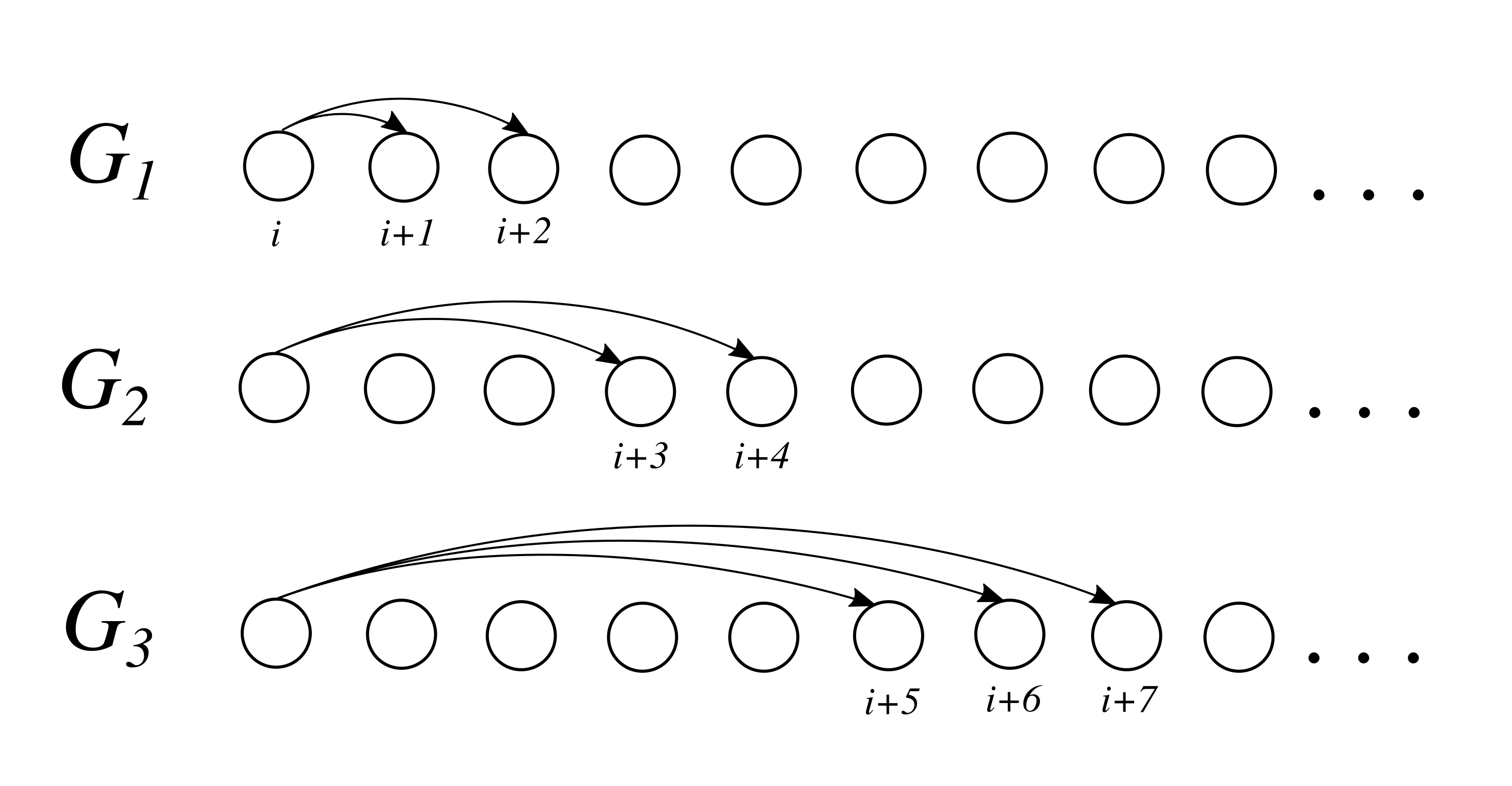 Figure 3
Figure 3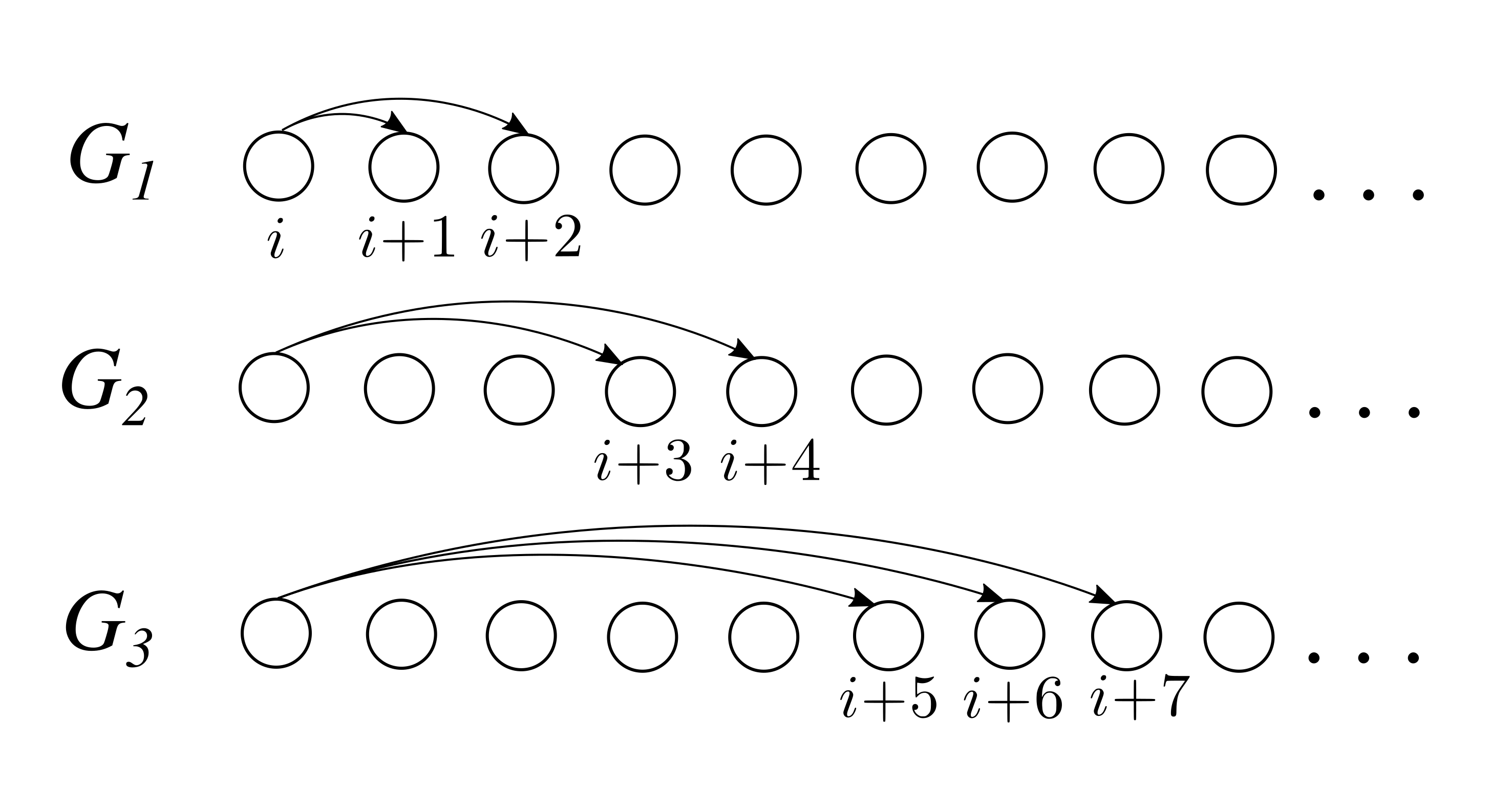 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6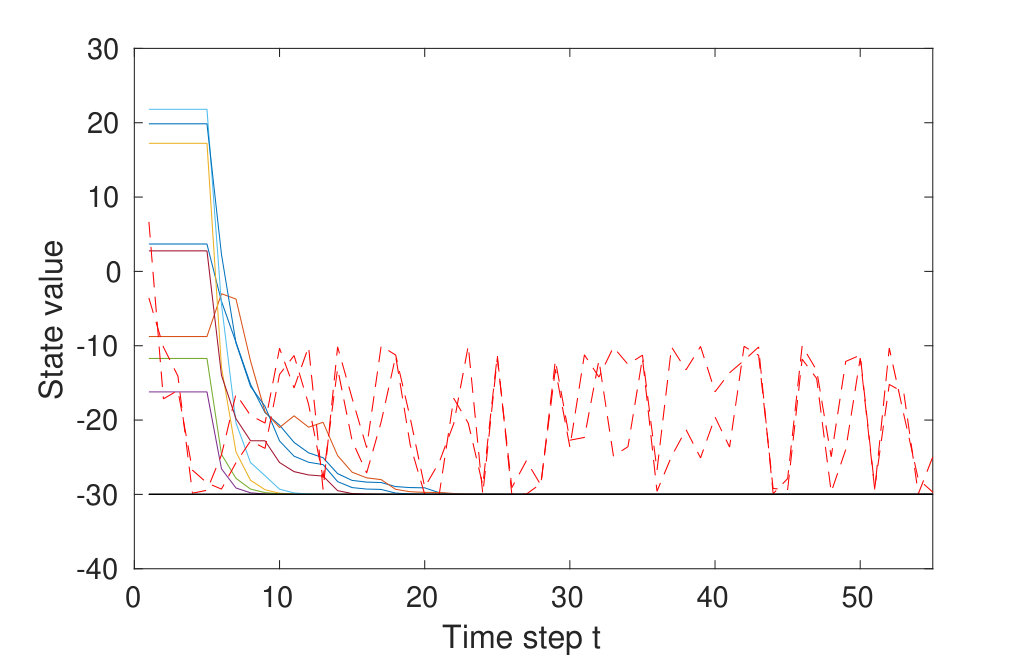 Figure 7
Figure 7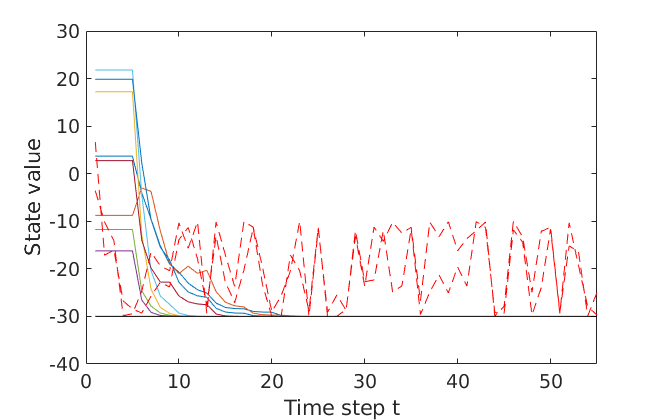 Figure 8
Figure 8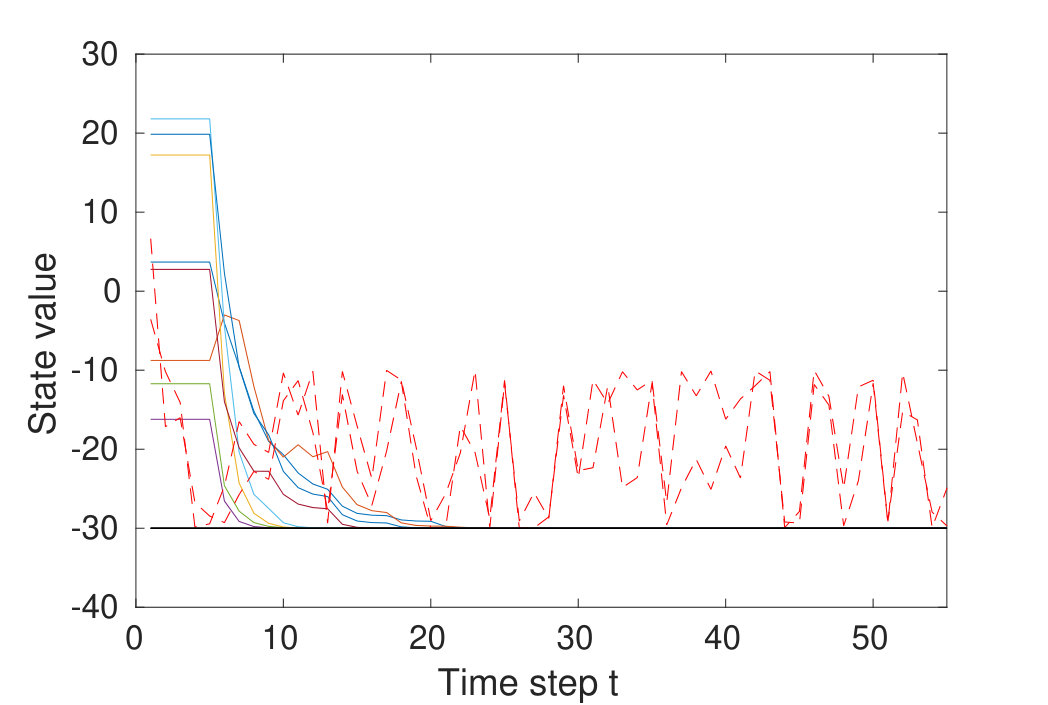 Figure 9
Figure 9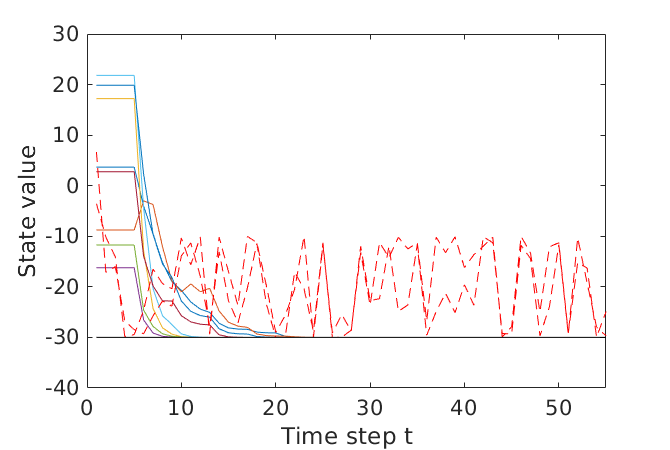 Figure 10
Figure 10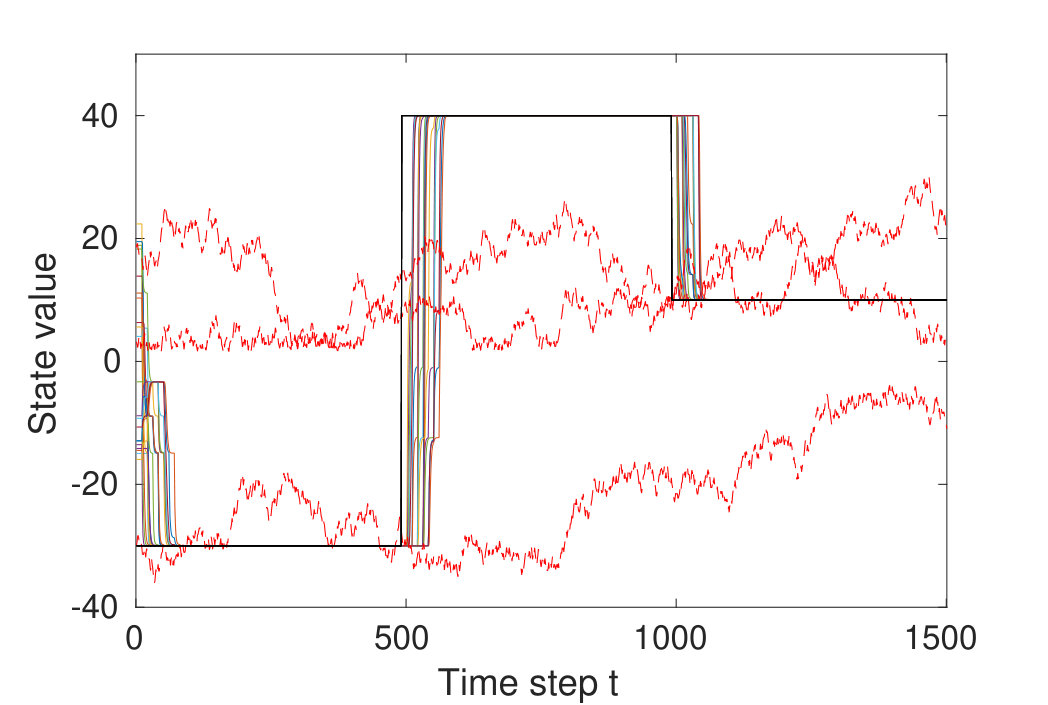 Figure 11
Figure 11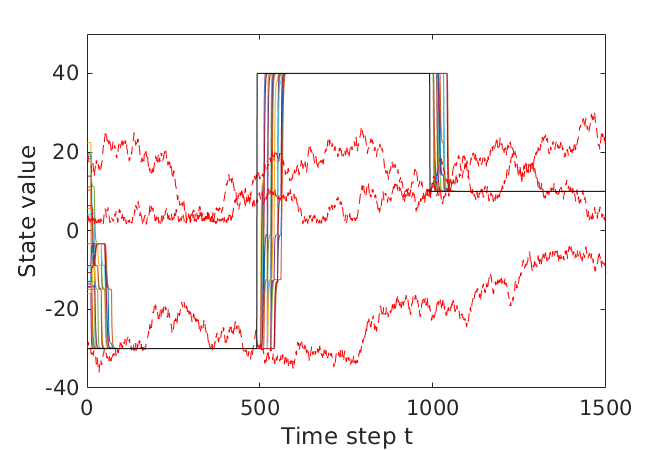 Figure 12
Figure 12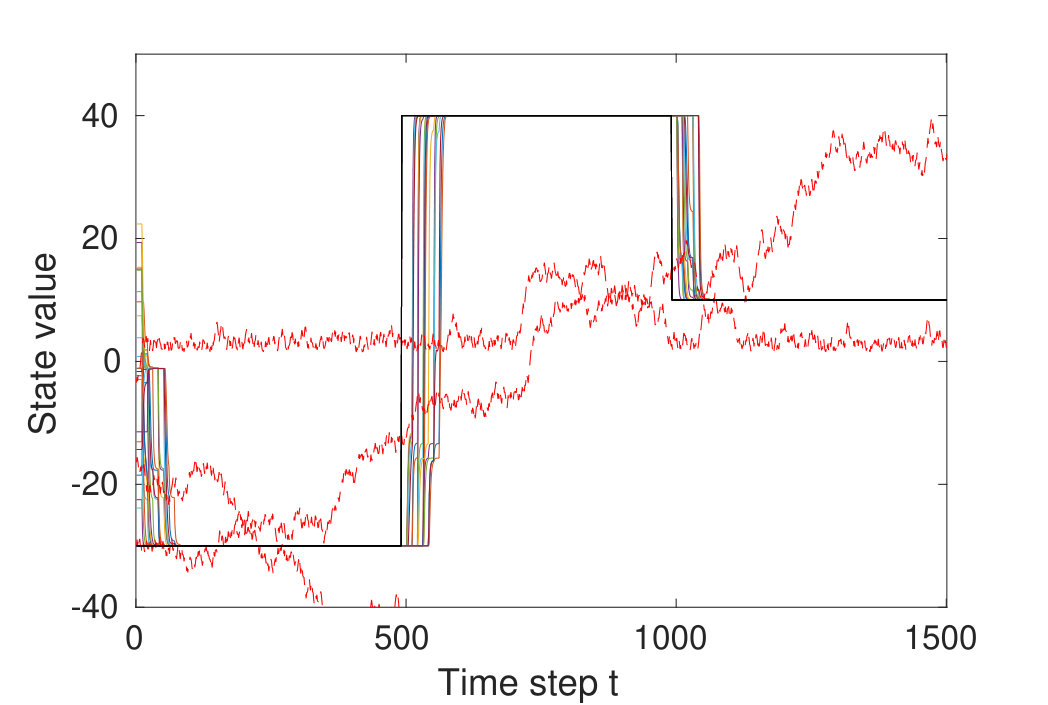 Figure 13
Figure 13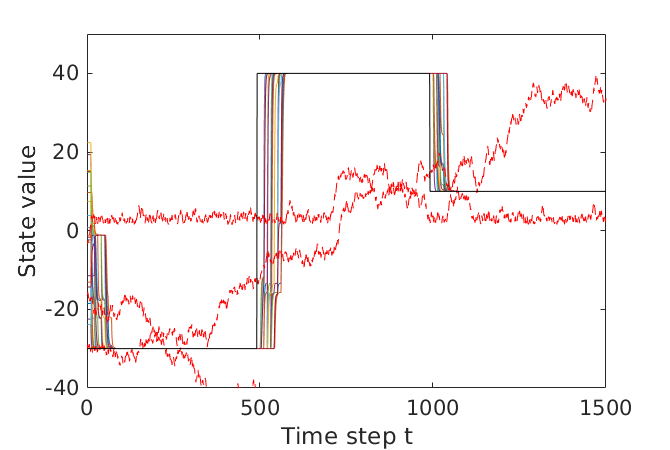 Figure 14
Figure 14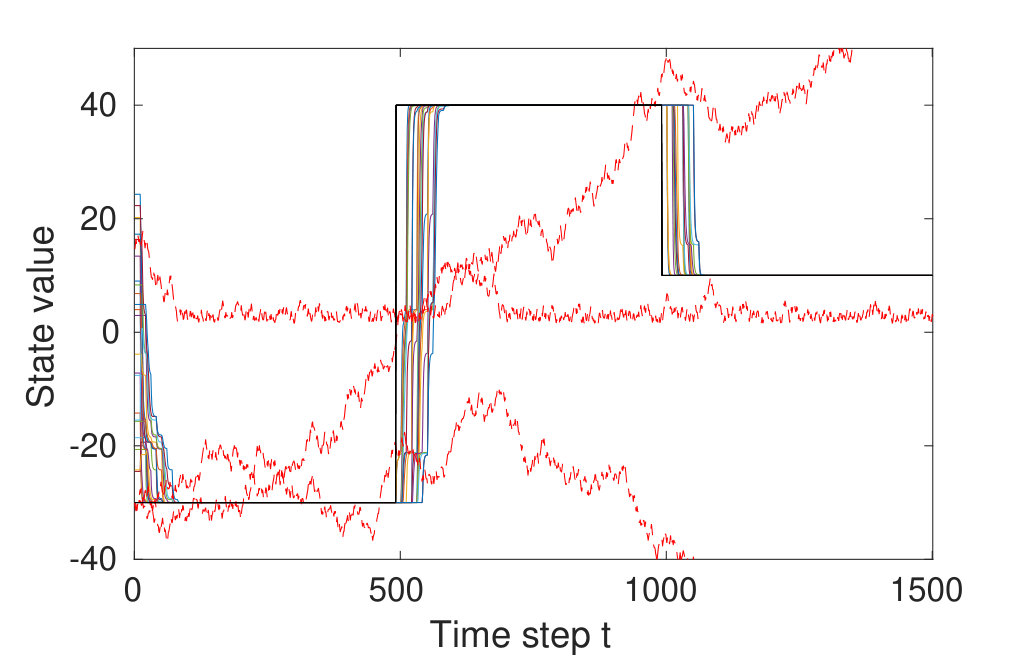 Figure 15
Figure 15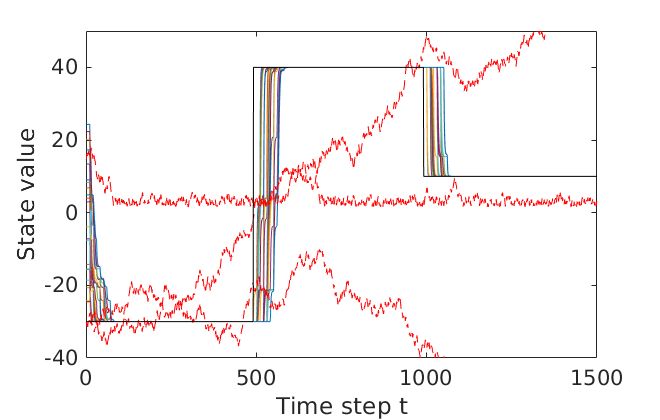 Figure 16
Figure 16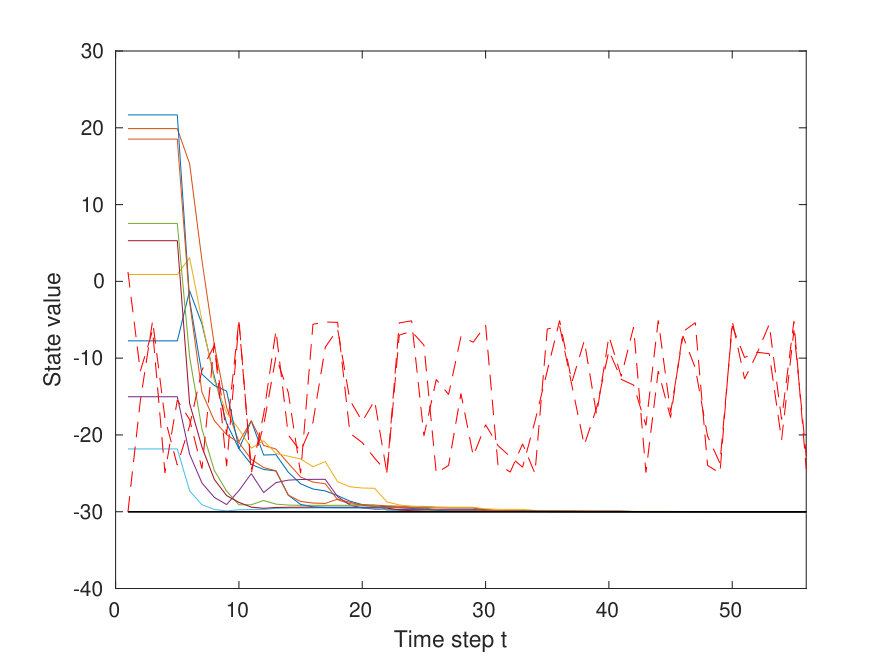 Figure 17
Figure 17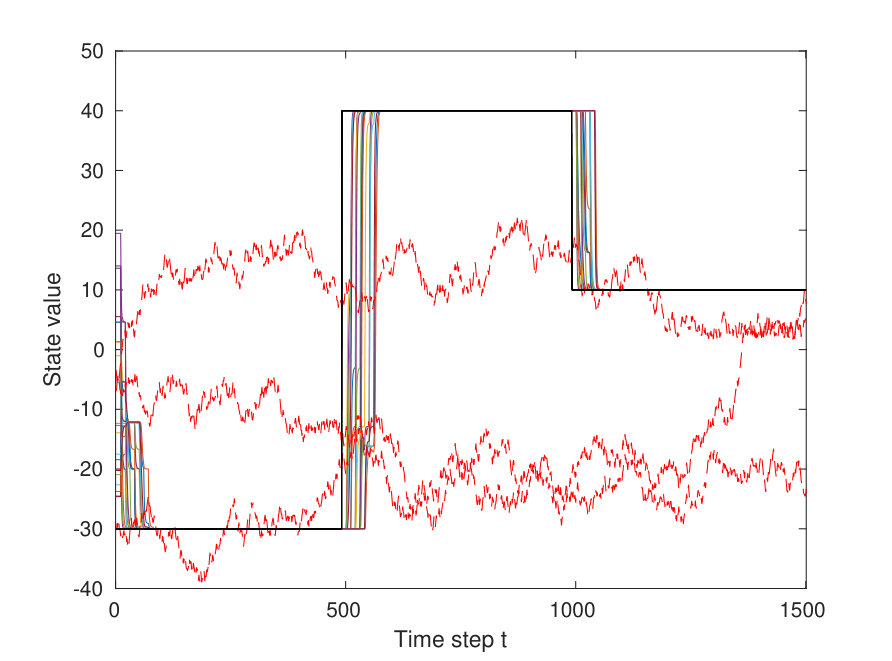 Figure 18
Figure 18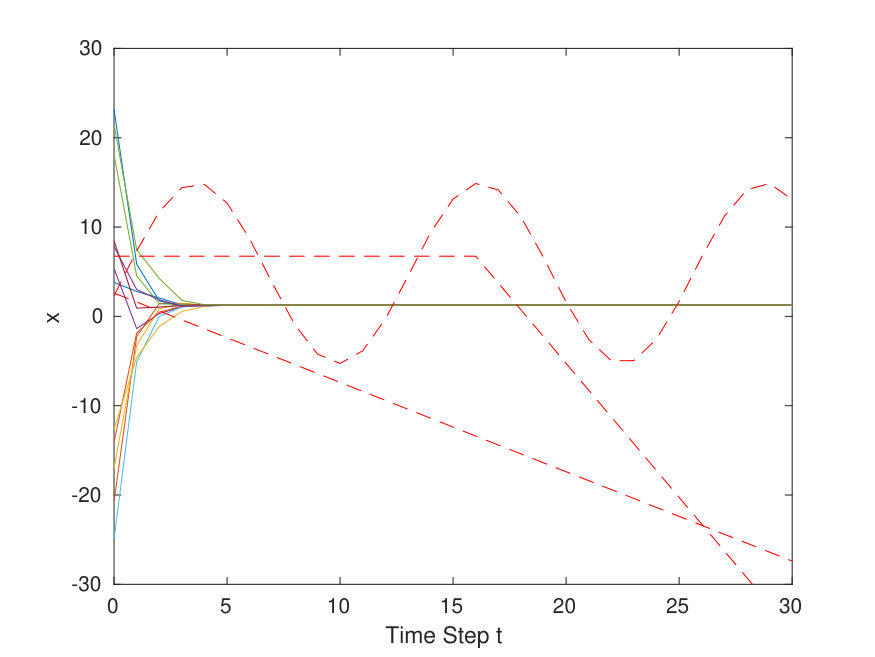 Figure 19
Figure 19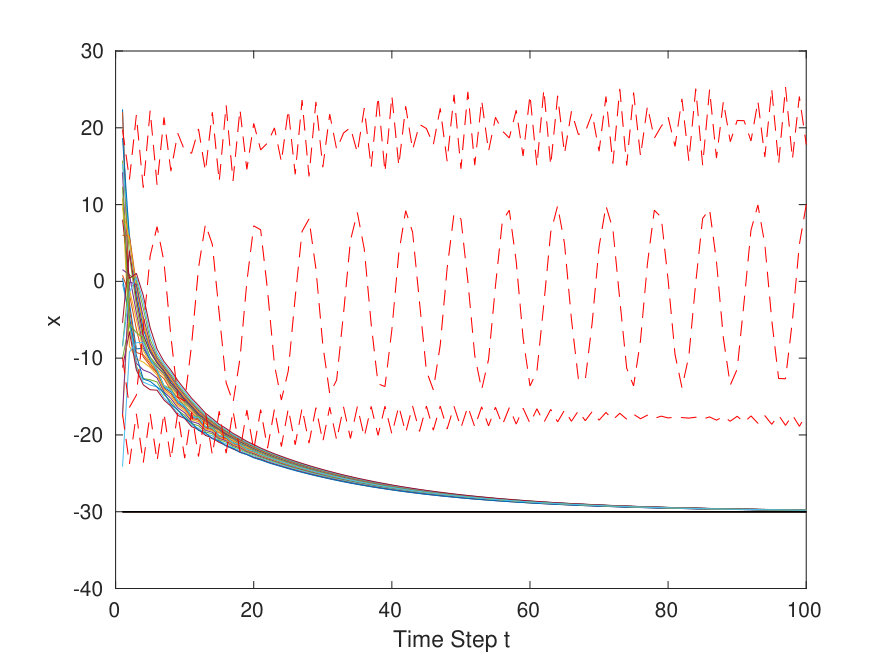 Figure 20
Figure 20 Figure 21
Figure 21Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Resilient Leader-Follower Consensus to Arbitrary Reference Values in Time-Varying Graphs
James Usevitch and Dimitra Panagou James Usevitch is with the Department of Aerospace Engineering, University of Michigan, Ann Arbor; [email protected]. Dimitra Panagou is with the Department of Aerospace Engineering, University of Michigan, Ann Arbor; [email protected]. The authors would like to acknowledge the support of the Automotive Research Center (ARC) in accordance with Cooperative Agreement W56HZV-14-2-0001 U.S. Army TARDEC in Warren, MI, and of the Award No W911NF-17-1-0526. This work has been funded by the Center for Unmanned Aircraft Systems (C-UAS), a National Science Foundation Industry/University Cooperative Research Center (I/UCRC) under NSF Award No. 1738714 along with significant contributions from C-UAS industry members.
Abstract
Several algorithms in prior literature have been proposed which guarantee consensus of normally behaving agents in a network that may contain adversarially behaving agents. These algorithms guarantee that the consensus value lies within the convex hull of initial normal agents’ states, with the exact consensus value possibly being unknown. In leader-follower consensus problems however, the objective is for normally behaving agents to track a reference state that may take on values outside of this convex hull. In this paper we present methods for agents in time-varying graphs with discrete-time dynamics to resiliently track a reference state propagated by a set of leaders despite a bounded subset of the leaders and followers behaving adversarially. Our results are demonstrated through simulations.
I Introduction
Guaranteeing the resilience of multi-agent systems to adversarial misbehavior and misinformation is critically needed in modern autonomous systems. As part of this need, the resilient consensus problem has been treated in the literature for several decades. In this problem, normally behaving agents in a multi-agent network seek to come to agreement on one or more state variables in the presence of adversarially behaving agents whose identity is unknown. Several algorithms based upon the Mean-Subsequence-Reduced family of algorithms [1] have been proposed which guarantee consensus of the normally behaving agents when the number of adversaries is bounded and the network communication structure satisfies certain robustness properties. These discrete-time algorithms, which include the W-MSR, SW-MSR, DP-MSR, and QW-MSR algorithms [2, 3, 4, 5], guarantee that the final consensus value of the normal agents is within the convex hull of the normal agents’ initial states. However, the exact final value within this convex hull may depend in part upon the behavior of the adversarial agents.
A related problem in prior literature is the leader-follower consensus problem, where the objective is for normally behaving agents to come to agreement on the reference value of a leader or set of leaders [6, 7, 8]. Prior work in this area typically assumes that there are no adversarially misbehaving agents; i.e. all leaders and followers follow the intended control laws. An interesting direction of research is extending the property of resilience to the leader-follower consensus scenario, i.e., follower agents tracking the leader agents’ reference state while rejecting the influence of adversarial agents whose identity is unknown. One aspect which prevents prior resilient consensus results from being extended to this case is that the reference state may not lie within the convex hull of normal agents’ initial states.
In addition, leader-follower consensus can be viewed in an adversarial light. In some scenarios the objective of adversarial agents in a network may be to drive as many agents’ states as possible towards a malicious value or unsafe set. The misbehaving nodes in a network may be considered “leaders” seeking to divert normal agents’ states to harmful values. Prior results in the literature on MSR-type algorithms guarantee that the adversaries cannot drive normal nodes’ states to arbitrary values when the adversarial set is bounded, but do not analyze the extent of the adversaries’ influence when these bounds are violated.
Recent work related to the resilient leader-follower consensus problem includes [9, 10, 11, 12]. In [9], the problem of resilient distributed estimation is considered where certain ”reliable agents” drive the errors of the remaining normal agents to the static reference value of zero in the presence of misbehaving agents. In [10, 13], the problem of distributed, resilient estimation in the presence of misbehaving nodes is treated. The authors show conditions under which information about the decoupled modes of the system is resiliently transmitted from a group of source nodes to other nodes that cannot observe those modes. Their results guarantee exponential convergence to the reference modes of the system. In our prior work [12], we considered the case of leader-follower consensus to arbitrary static reference values using the W-MSR algorithm [2]. In addition, the resilient leader-follower consensus problem is closely related to the secure broadcast problem [14], where an agent known as a “dealer” seeks to broadcast a message to an entire network in the presence of misbehaving agents.
In this technical note, we briefly address the problem of resilient leader-follower consensus in the discrete-time domain. Specifically, we make the following contributions:
- •
We demonstrate conditions under which normally behaving agents in time-varying graphs can resiliently track the reference signal of a set of leaders in the presence of a bounded number of arbitrarily misbehaving agents using the Sliding Window Mean-Subsequence-Reduced (SW-MSR) algorithm. To demonstrate these conditions, we introduce the notion of strong -robustness with respect to a subset , which to the best of our knowledge has not been previously defined.
- •
We demonstrate sufficient conditions under which a properly selected subset of adversarially behaving agents can drive a network of agents appyling the SW-MSR algorithm to any arbitrary value.
This paper is organized as follows: in Section II we outline notation used in this paper, in Section III we give the problem formulation, in Section IV we outline conditions for resilient leader-follower consensus in time-varying graphs, in Section V we discuss the adversarial implications of the results on resilient leader-follower consensus, in Section VI we present simulations demonstrating our results, and in Section VII we give a conclusion and directions for future work.
II Notation
The set of real numbers and integers are denoted and , respectively. The set of nonnegative reals and nonnegative integers are denoted and , respectively. The cardinality of a set is denoted . The set union, intersection, and set difference operations of two sets and are denoted by , , and respectively. We denote . A digraph of agents, with , is denoted as where is the set of labeled agents (represented by the vertices of the graph), and is the (possibly time-varying) set of edges. An edge from to , , denoted as , represents the ability of the head to send information to the tail at time . Note that for digraphs does not necessarily imply that . The set of in-neighbors of agent is denoted . Similar to [2], we define the inclusive neighbor set of node as . The set of out-neighbors of each agent is denoted .
III Problem Formulation
Consider a digraph of agents with time-varying edges, denoted . Each agent has a state . Two types of agents are considered: leader agents (also called “source” agents) and follower agents. The set of leader agents consists of agents which propagate a desired reference signal to the set of follower agents.
Definition 1
The set of leader agents is denoted . The set of follower agents is denoted .
Assumption 1
The sets and are static and satisfy and .
Each normally behaving leader agent updates its state according to a reference function as follows:
[TABLE]
The precise definition of normally behaving will be given in Definition 4.
The purpose of this paper is to determine conditions under which normally behaving follower agents resiliently achieve consensus with a static reference state of the set of normally behaving leader agents in the presence of a possibly nonempty set of misbehaving agents, where the precise definition of misbehaving agents will be given in Definition 3.
Problem 1
Given a digraph with a time-varying edge set satisfying Assumption 1, determine conditions under which for all normally behaving follower agents and for all normally behaving leaders in the presence of a possibly nonempty misbehaving subset of agents .
Each normally behaving leader agent is able to send its state value to its out-neighbors at each time . In addition, each normally behaving follower agent can receive state values from its in-neighbors at each time , and can also send its own state value to its out-neighbors at each time .
Definition 2
The value received by agent from agent at time is denoted .
Since the set of edges is time-varying, agents use a sliding-window approach over a time period when taking into account information received from their in-neighbors. Let . At each time , each normally behaving follower agent considers information received from the set
[TABLE]
i.e. the union of ’s in-neighbor sets over the time interval if , or if . Each normally behaving follower agent then updates its state according to the Sliding Weighted Mean-Subsequence-Reduced (SW-MSR) algorithm [4], which is outlined in Algorithm 1. In essence, the SW-MSR algorithm causes normally behaving follower agents to update their state based on the most recently received information from each in-neighbor in . In addition, agents filter out a subset of the information received based upon a prespecified parameter .
Remark 1
If , the SW-MSR algorithm essentially reduces to the Weighted Mean-Subsequence-Reduced (W-MSR) algorithm [2]. The SW-MSR algorithm can be seen as a generalization of the W-MSR algorithm to digraphs with time-varying edge sets.
In contrast to much of the prior literature on leader-follower consensus which typically assumes that all agents apply nominally specified control laws, this paper considers the presence of misbehaving agents:
Definition 3
An agent is misbehaving if at least one of the following conditions hold:
There exists a time where agent does not update its state according to (1) and also does not update its state according to (4). 2. 2.
There exists a time where does not communicate its true state value to at least one of its out-neighbors; i.e. and s.t. . 3. 3.
There exists a time where communicates different values to different out-neighbors; i.e. and s.t. .
The set of misbehaving agents is denoted .
Definition 4
The set of agents which are not misbehaving are denoted . Agents in are referred to as normally behaving agents.
Intuitively, misbehaving agents are agents which update their states arbitrarily or communicate false information to their out-neighbors. By Definition 3, the set of misbehaving agents includes both malicious agents and Byzantine agents [2].
This paper considers scenarios where both followers and leaders are vulnerable to adversarial attacks and faults, and therefore the set may possibly be nonempty, and the set may possibly be nonempty. The following notation will be used:
Definition 5** (Misbehaving agent notation)**
The set of misbehaving leaders is denoted as . The set of misbehaving followers is denoted as .
Definition 6** (Normally behaving agent notation)**
The set of normally behaving leaders is denoted . The set of normally behaving followers is denoted .
III-A Review of Resilient Consensus Concepts
This subsection will briefly review several definitions associated with the resilient consensus literature that will be used in this paper. To quantify the distribution of agents in throughout a digraph , the notions of -total and -local sets are used.
Definition 7** ([2])**
Let . A set is F-total if it contains at most nodes; i.e. .
Definition 8** ([2])**
Let . A set is F-local with respect to (w.r.t.) a given if , .
Sufficient conditions for the success of several resilient consensus algorithms involve the graph theoretical notions of -reachability, -robustness, and strong -robustness, which are defined as follows:
Definition 9** ([2])**
Let and be a digraph. A nonempty subset is -reachable if such that .
Definition 10** ([2])**
Let . A nonempty, nontrivial digraph on nodes is -robust if for every pair of nonempty, disjoint subsets of , at least one of the subsets is -reachable. By convention, the empty graph is 0-robust and the trivial graph is 1-robust.
Definition 11** (Strong -robustness w.r.t. [10])**
Let , be a digraph, and be a nonempty subset. is strongly -robust w.r.t. if for any nonempty subset , is -reachable.
Remark 2
Given a particular subset , it can be verified in polynomial time whether is strongly robust w.r.t. [11]. On the other hand, determining the -robustness of a digraph is NP-hard in general [15], but can be computed using mixed integer linear programming [16, 17].
In this paper, we introduce the concept of strong -robustness, which is defined as follows:
Definition 12
Let and let . Let be a digraph with a time-varying edge set, and define . Then is strongly -robust with respect to a subset if is strongly -robust with respect to for all .
Remark 3
Strong -robustness generalizes the notion of strong -robustness to digraphs with a time-varying edge set. Note that the property of strong -robustness in Definition 11 is a particular case of strong -robustness with .
Remark 4
In many practical networks it may be difficult to ensure that a digraph is strongly -robust w.r.t. at every time step . The time window relaxes this requirement by only requiring the union of over the last timesteps to be strongly -robust w.r.t. . Increasing allows for edges to be “active” less often while still preserving the -robustness of .
IV Resilient Leader-Follower Consensus in Time-Varying Graphs
For our analysis of time-varying graphs, the following functions are defined (with as per Algorithm 1):
[TABLE]
The following Lemma establishes that and are nonincreasing and nondecreasing functions, respectively, on any time interval where is constant.
Lemma 1
Let be a nonempty, nontrivial, simple digraph with nonempty. Let , with . Suppose that is an -local set with respect to , and suppose that all normally behaving agents apply the SW-MSR algorithm with parameter . If is constant , then all of the following statements hold :
- •
**
- •
* and are nonincreasing and nondecreasing, respectively.*
Proof:
First, observe that , by (1). Since is constant , by (6) we have , . Next, consider any . By definition of and , where is defined by (3). Now consider any agent . If we have , the fact that implies any value satisfying this condition is one of the highest values in and will be filtered out as per the SW-MSR Algorithm (Algorithm 1). Similarly, if , then is one of the lowest values in and will be filtered out. Therefore all state values in fall in the interval . Since the values of imply a convex combination of values in the set , . Further, since by definition of and we have , where , it holds that , . These arguments imply . Similar arguments can be used to show .
Now by induction assume and , for all such that , . By (6), , . In addition, being constant on implies . Therefore . Since , it can be shown by prior arguments that for all will lie in the interval . Therefore all will update their states with a convex combination of values in , implying and . ∎
The next theorem demonstrates that the error between the normal nodes and normally behaving leaders decreases exponentially on any time interval where is constant and is sufficiently large.
Theorem 1
Let be a nonempty, nontrivial, simple digraph. Let be defined as per Definitions 1 and 3. Let , with , and let be defined as in (6). Suppose that is nonempty, is an -local set with respect to , is strongly -robust w.r.t. the set , and all normally behaving agents apply the SW-MSR algorithm with parameter . If is constant and for some , then
[TABLE]
where is defined in Algorithm 1. Furthermore, if then
[TABLE]
Proof:
Consider the case where is constant for and . This implies is constant , . We define
[TABLE]
We prove the result by first showing that decreases over an appropriate sequence of and with an appropriate choice of . Let and . is strongly -robust w.r.t , implying is strongly -robust w.r.t . being strongly -robust with respect to implies there exists a nonempty such that , . Since is -local and , this implies . This implies by the SW-MSR Algorithm, contains at least one normally behaving leader with . This can be seen by noting that , . Using this fact, lower bounds on for all and can be established as follows: recall that the weights are lower bounded by . By Lemma 1, , . Observe that
[TABLE]
Since there exists at least one normally behaving leader in , (8) represents the minimum possible value for . Extending these bounds to time yields
[TABLE]
This holds for . Using similar arguments, an upper bound on can be established as follows:
[TABLE]
for . Therefore for all .
We show next that . Define as the set of all such that . Since by (9) and (10), is therefore nonempty. Since each agent in always uses its own state in (4) as per the SW-MSR algorithm, lower bounds on the state of each can be established as:
[TABLE]
which holds for . Similarly, the following upper bounds can be established:
[TABLE]
which holds for . These arguments imply that for all , . Therefore .
We next show that . Since is strongly -robust, there exists a nonempty such that for all , . Since is an -local set, includes at least normally behaving agents from . Observe that by the definition of the state of each satisfies either or for all . Therefore will incorporate at least one in-neighbor’s state from the interval in its state update, yielding the following bounds for all :
[TABLE]
for all . Similarly,
[TABLE]
for all . This implies that . Furthermore, we define as the set of all such that . By this definition, . Note that the bounds in equations (13) and (14) also apply to all agents since , and each does not filter out its own state. Therefore , and therefore .
This logic can be continued iteratively to show that for all , such that . This can be done by defining
[TABLE]
which satisfies , and considering each for . Since is -robust, if is nonempty at time then there exists a nonempty such that , . Using prior arguments, it can then be shown that . This implies that . Similarly, by using prior arguments it also holds that , and therefore . This implies that for all , such that .
Since is finite, there exists a , such that . This implies that for all ,
[TABLE]
Considering , we have
[TABLE]
Recall that and . This implies that , implying
[TABLE]
Recalling that at time , and that for all , it follows that since after no more than time steps. Therefore we have by substituting into (IV). The above analysis can be repeated to show
[TABLE]
for , such that . This yields the result when .
If , then . Note that implies , and therefore the limit converges to zero. By (6), implies . ∎
Remark 5
Although the proof of Theorem 1 follows a similar line of reasoning as the excellent results in [4], Theorem 1 contains two significant theoretical differences. First, Theorem 1 considers the more general Byzantine adversarial model [2], whereas the results in [4] consider only malicious adversaries.222In essence, malicious adversaries may update their state arbitrarily, but will send the same state information to all out-neighbors. Byzantine adversaries may update their state arbitrarily and send different information to different out-neighbors. Second, Theorem 1 considers consensus of the followers to a specific reference value propagated by the set of normally behaving leader agents which may lie outside the convex hull of initial agents’ states. The analysis in [4] considers leaderless consensus to some unknown value in the convex hull of the initial normal agents’ states.
V Adversarial Implications
We next discuss the adversarial implications of Theorem 1. In most leaderless resilient consensus settings considered in prior work (e.g. [4]), the networks consist only of normally behaving agents seeking a common consensus value, and adversarial agents behaving arbitrarily. Often, these results guarantee resilient consensus if the adversary model is at most -local. However, these results for leaderless resilient consensus raise the following critical question: What happens if the adversary model is NOT -local? To the authors’ best knowledge, little (if any) analysis has focused on the precise effects of the -local assumption being violated in these scenarios. From a practical standpoint it is difficult to provide absolute guarantees that will always be strictly -local in any real-world application of resilient algorithms. It is therefore critical to understand the consequences which will occur if the -local assumption does not hold.
Theorem 1 can be used to show one possible catastrophic outcome if the -local assumption is violated in a leaderless network. More specifically, Theorem 1 can be used to demonstrate that for a leaderless network applying the SW-MSR algorithm, if there exists a colluding set of adversarial agents and if the network is strongly -robust with respect to , then the adversarial agents can drive the states of all normal agents to any arbitrary value. This result is presented more precisely in the following corollary:
Corollary 1.1
Let be a nonempty, nontrivial, simple digraph with . Let , with . Suppose that is strongly -robust w.r.t. a set of misbehaving agents and all normally behaving agents apply the SW-MSR algorithm with parameter . If all agents send a constant, common value to all of their respective out-neighbors for all , and if for some , then the error between the normally behaving agents’ states and the adversaries’ common state is exponentially decreasing for . Furthermore, if then .
Proof:
The proof follows from Theorem 1 by treating as the set , as the set , and as the signal . Note that by Definition 3, need not be equal to any of the actual states of . ∎
In short, if the digraph for a leaderless consensus network is strongly -robust w.r.t. the adversary set and the adversaries collude to send a common constant to their out-neighbors on sufficiently long time intervals, the error between the normal agents and the adversarial signal will decrease exponentially. These conditions imply that the adversaries have the ability to drive the entire network to arbitrary state values. When working with a given digraph , this result demonstrates the need for awareness of the agent subsets such that is strongly -robust w.r.t. . Adversaries seeking to obtain control of the network will succeed if such subsets are successfully compromised. However, determining methods to search for all such possible subsets is out of the scope of the current technical note. We leave exploration in this direction for future work.
VI Simulations
This paper presents a leader-follower framework which can tolerate up to arbitrarily misbehaving nodes. It can be applied to a wide range of problems where a network of agents need to be driven to a desired reference value by a set of leaders. Some examples of such reference values include a reference altitude for unmanned aerial vehicles, a reference rendezvous time for multiple unmanned ground vehicles, and a reference radius for a circular patrolling path [4], to name only a few.
The simulations consider agents in time-varying -circulant digraphs. The Appendix contains the definition of -circulant digraphs and details about the conditions under which -circulant digraphs are strongly -robust w.r.t. a subset. For each simulation the network topology switches between the three graphs depicted in Figure 1. The union of the three graphs forms a -circulant digraph. The simulations consider the presence of malicious adversaries, which may send the same misinformation to their respective out-neighbors [2]. In all simulations, agents have no knowledge as to whether their in-neighbors are normal, malicious, or behaving as leaders. In addition, and the agents’ initial states are random values on the interval for all agents in . The results of the first simulation are shown in figure 2. In this simulation, the number of agents is 15, with (5 leaders). The time window is steps, and the network switches graphs every 4 seconds (), where the graphs are depicted in Figure 1. By the results of the Appendix, the digraph is strongly -robust w.r.t. . For all normal follower agents, parameter . Two of the agents in the network behave maliciously. The function is simply the constant . The error between the normally behaving agents’ states (denoted by colored lines) and the normally behaving leaders’ states (the solid black line) decreases exponentially in the presence of two misbehaving agents (the dotted red lines). The second simulation, depicted in Figure 3, considers a scenario where takes on different values over time. In this simulation, the network size is agents, with (7 leaders). The time window for each agent is , and the network switches between graphs every 10 seconds (). By the results of the Appendix, the digraph is strongly -robust w.r.t. . For all normal follower agents, parameter . Three of the agents in the network behave maliciously. The error between the normally behaving agents and the normally behaving leaders decreases exponentially on the time intervals where is constant as per the conditions of Theorem 1.
VII Conclusion
This paper presented conditions for agents with discrete-time dynamics to resiliently track a reference signal propagated by a set of leader agents despite a bounded number of the leaders and followers behaving adversarially. Future work includes considering time-varying graphs, asynchronous communication, and also continuous-time systems.
VIII Appendix: -Circulant Digraphs
-Circulant graphs [18] are a particular class of graphs which, given a properly selected subset , are strongly -robust w.r.t. . To justify our choice of using -circulant digraphs in our demonstrations, we provide formal conditions under which these graphs are strongly -robust w.r.t. a given . These results were first presented in our prior work [12].
First, we give the definitions of circulant graphs. An undirected graph of nodes is called circulant if there exists a set such that , [19]. We call such a graph an undirected circulant graph and denote it as . The name circulant derives from the adjacency matrix for such graphs being a circulant matrix [19, 20]. These graphs are constructed over the additive group of integers modulo (the nodes and are congruent modulo ). Similarly, we call a digraph of nodes circulant if there exists a set such that , . We denote such a graph as and call it a directed circulant graph or circulant digraph.
-Circulant digraphs and -circulant undirected graphs are specific classes of circulant graphs defined as follows:
Definition 13
Let and let . A -circulant digraph is any circulant digraph of the form .
Definition 14
Let and let . A -circulant undirected graph is any circulant graph of the form .
We show that these graphs can demonstrate strong -robustness and TLF robustness with parameter . As per the definition of circulant graphs, we assume all agents are indexed . In our next proof we refer to sets of consecutive agents by index. An example is in a network of agents. Since the index numbers are defined on the set of integers modulo , the set would also be a set of consecutive agents in a network of agents.
Theorem 2
A -circulant digraph is strongly -robust with respect to if contains a set of consecutive agents by index such that and .
Proof:
Suppose and . Without loss of generality, let the first agent in be labeled as agent and the last agent in as agent . We must show that all nonempty are -reachable. If agent then is -reachable since which implies . Next, suppose that agent and . Since , this implies that and therefore is -reachable. This reasoning can be continued inductively by assuming , , and observing that . Analyzing the remaining subsets of this form in the graph yields the result. Note that if is ever the number of an agent in , then we need not consider it ever being in and the analysis can be continued with the next agent not in . ∎
Similar results also hold for undirected -circulant graphs:
Theorem 3
An undirected circulant graph of the form is strongly -robust with respect to if contains a set of consecutive agents such that and .
Proof:
The same method as in Theorem 2 can be applied to prove the result. ∎
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1[1] R. M. Kieckhafer and M. H. Azadmanesh, “Reaching approximate agreement with mixed-mode faults,” IEEE Transactions on Parallel and Distributed Systems , vol. 5, no. 1, pp. 53–63, 1994.
- 2[2] H. J. Le Blanc, H. Zhang, X. Koutsoukos, and S. Sundaram, “Resilient asymptotic consensus in robust networks,” IEEE Journal on Selected Areas in Communications , vol. 31, no. 4, pp. 766–781, 2013.
- 3[3] S. M. Dibaji and H. Ishii, “Resilient consensus of second-order agent networks: Asynchronous update rules with delays,” Automatica , vol. 81, pp. 123–132, 2017.
- 4[4] D. Saldana, A. Prorok, S. Sundaram, M. F. Campos, and V. Kumar, “Resilient consensus for time-varying networks of dynamic agents,” in 2017 American Control Conference (ACC) . IEEE, 2017, pp. 252–258.
- 5[5] S. M. Dibaji, H. Ishii, and R. Tempo, “Resilient randomized quantized consensus,” IEEE Transactions on Automatic Control , vol. 63, no. 8, pp. 2508–2522, 2018.
- 6[6] D. V. Dimarogonas, P. Tsiotras, and K. J. Kyriakopoulos, “Leader–follower cooperative attitude control of multiple rigid bodies,” Systems & Control Letters , vol. 58, no. 6, pp. 429–435, 2009.
- 7[7] W. Ren, “Multi-vehicle consensus with a time-varying reference state,” Systems and Control Letters , vol. 56, no. 7-8, pp. 474–483, 2007.
- 8[8] ——, “Consensus tracking under directed interaction topologies: Algorithms and experiments,” in American Control Conference, 2008 . IEEE, 2008, pp. 742–747.