Convex Integration Solutions for the Geometrically Non-linear Two-Well Problem with Higher Sobolev Regularity
Francesco Della Porta, Angkana R\"uland

TL;DR
This paper constructs higher Sobolev regularity solutions for a non-linear two-well problem in shape-memory alloys using convex integration, advancing understanding of microstructure regularity and phase transformations.
Contribution
It provides the first convex integration solutions with higher Sobolev regularity for the non-linear two-well problem, relevant to shape-memory alloy modeling.
Findings
Constructed solutions with higher Sobolev regularity for the two-well problem.
Demonstrated the applicability of convex integration in non-linear matrix spaces.
Linked regularity of solutions to microstructure selection mechanisms.
Abstract
In this article we discuss higher Sobolev regularity of convex integration solutions for the geometrically non-linear two-well problem. More precisely, we construct solutions to the differential inclusion subject to suitable affine boundary conditions for with such that the associated deformation gradients enjoy higher Sobolev regularity. This provides the first result in the modelling of phase transformations in shape-memory alloys where , and where the energy minimisers constructed by convex integration satisfy higher Sobolev regularity. We show that in spite of additional difficulties arising from the treatment of the non-linear matrix space geometry, it is possible to deal with…
Click any figure to enlarge with its caption.
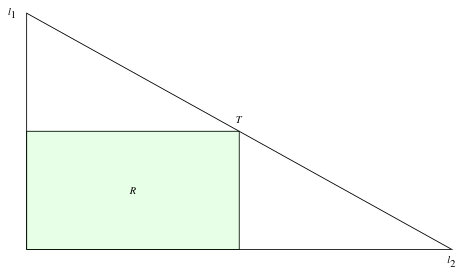 Figure 1
Figure 1Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Convex Integration Solutions for the Geometrically Non-linear Two-Well Problem with Higher Sobolev Regularity
Francesco Della Porta
Max-Planck-Institute for Mathematics in the Sciences, Inselstr. 22, 04103 Leipzig
and
Angkana Rüland
Max-Planck-Institute for Mathematics in the Sciences, Inselstr. 22, 04103 Leipzig
Abstract.
In this article we discuss higher Sobolev regularity of convex integration solutions for the geometrically non-linear two-well problem. More precisely, we construct solutions to the differential inclusion subject to suitable affine boundary conditions for with
[TABLE]
such that the associated deformation gradients enjoy higher Sobolev regularity. This provides the first result in the modelling of phase transformations in shape-memory alloys where , and where the energy minimisers constructed by convex integration satisfy higher Sobolev regularity. We show that in spite of additional difficulties arising from the treatment of the non-linear matrix space geometry, it is possible to deal with the geometrically non-linear two-well problem within the framework outlined in [RZZ18]. Physically, our investigation of convex integration solutions at higher Sobolev regularity is motivated by viewing regularity as a possible selection mechanism of microstructures.
1. Introduction
Shape-memory alloys are solid materials which undergo a first order diffusionless solid-solid phase transformation in which symmetry is reduced in passing from the high temperature phase (austenite) to the low temperature phase (martensite). This reduction of symmetry gives rise to complex microstructures. Mathematically, these have been successfully modelled within the framework of the calculus of variations [BJ92, Bal04] by minimizing energy functionals of the form
[TABLE]
Here denotes a reference domain, models a stored energy function which is typically highly non-quasiconvex, describes the deformation of the material and denotes temperature. In order to model the solid-solid phase transformation under consideration, the energy density is assumed to be
- •
frame indifferent, i.e., for all ,
- •
invariant under material symmetries, i.e., for all , where the group models the material symmetries.
As the minimization of (1) (subject, e.g., to certain boundary conditions) is typically very difficult, a common first step towards the analysis of possible microstructures is the analysis of exactly stress-free solutions, i.e., of deformations such that , which can also be rephrased as
[TABLE]
The set models the energy wells, i.e., the zero energy states. By frame-indifference and material symmetry these are of the form
[TABLE]
where and for some are positive definite matrices modelling the variants of martensite. Here denotes the transformation temperature from the high temperature phase, austenite, to the low temperature phase, martensite.
In solving (2) a surprising dichotomy arises. More precisely, there are physically relevant models for which on the one hand the problem (2) is very rigid if regularity conditions (which physically model surface energy constraints) are imposed. If for instance , these further regularity assumptions force the solutions to (2) to obey non-linear “hyperbolic” partial differential equations, and the solutions to propagate along characteristics, thus leading to rigidity of the differential inclusion (see [DM95] and also [Kir98] for the case and [Rül16] for the case in the geometrically linearised setting in three dimensions). If on the other hand, no regularity assumptions are made, then in many models a plethora of “wild” solutions exist [MŠ99, DM12]; the differential inclusion (2) becomes very flexible, the notion of characteristics is lost. While for a number of physical problems these “end point cases” are understood, a theory describing the “transition” from the flexible regime of “wild” solutions to the regime of “rigid” solutions is not yet available for martensitic transformations. Only very recently first results on the persistence of wild solutions at low, but positive regularity have been obtained [RZZ19, RZZ18, RTZ18]. It is the purpose of this note to further study the problem in a truly “geometrically non-linear” regime.
In [RZZ18] the authors provided a general framework for deducing higher regularity of convex integration solutions and applied this to a number of relevant phase transformation problems from the materials sciences. However, all the examples in [RZZ18] are limited to the setting where . If this is not the case, additional difficulties arise from understanding potentially complicated matrix space geometries (e.g., the applications of the algorithm in [RZZ18] heavily use barycentric coordinates in defining associated in-approximations). Discussing higher regularity convex integration solutions for the geometrically non-linear two-well problem in this article, we provide the first geometrically non-linear application of the algorithm in [RZZ18] in which is strictly smaller than .
To this end, we fix a temperature below the critical temperature and study the two-dimensional two-well problem for which
[TABLE]
where are respectively given by
[TABLE]
and We remark that, as shown in [BJ92, Sec. 5], given two wells with two rank-one connections (and the physically natural condition of equal determinant), one can always reduce the problem to our case via an affine change of variables. Important properties of this phase transformation are:
- •
A large lamination convex hull: (see (21)) and thus ,
- •
A dichotomy between rigidity and flexibility. On the one hand, the two-well problem with as in (9) allows for convex integration solutions [MŠ99, Dac07, DM12], that menas, it is flexible if no regularity is imposed, i.e., if is only bounded. On the other hand, the phase transformation is rigid if additional surface energy constraints are imposed: If , then a solution to the differential inclusion is locally a simple laminate (see [DM95]).
Thus, the two-well problem is one of the simplest geometrically non-linear models for martensitic phase transformations in which a dichotomy between rigidity and flexibility exists. It hence provides an ideal model setting for studying the transition between these regimes.
We remark that a physical motivation to understand the dichotomy between rigidity and flexibility is the characterisation of physically relevant microstructures. In this context, regularity could provide a selection mechanism for minimisers of (1) (see [RTZ18]). A different approach to select physically relevant microstructures other than regularity can be found in [DP19a]. We refer the reader to the discussion after Theorem 1 for more details.
1.1. Main results
In the setting of the two-well problem a main difficulty and novelty that we address is the fact that . Hence, a key aspect of our higher regularity analysis of convex integration solutions to the differential inclusion (2) for (3) and (8) involves an explicit investigation of the matrix space geometry of the two-well problem. Seeking to embed the higher regularity question of convex integration solutions for the two-well problem into the framework of [RZZ18], we rely on an explicit double-laminate construction (which is inspired by the construction in [Ped97, Chapter 5.3]) which yields suitable “orthogonal” coordinates for .
Exploiting the precise understanding of the quasiconvex hull , we obtain the following main result:
Theorem 1**.**
Let be as in (3)–(8). Let satisfy
[TABLE]
Then there exists such that for all , with and for all there exists a deformation such that
[TABLE]
Further, for we also have , where
[TABLE]
and .
Remark 1.1**.**
Arguing as in [RZZ19, RZZ18], it would have been possible to relax the condition (D). As in the present article this is not our main emphasis, we do not present the details for this possible extension of our results, but refer to the arguments in [RZZ19, RZZ18].
Remark 1.2**.**
Arguing as in [MŠ99], it would have been possible to generalise the result (at least) to some finitely piecewise affine boundary data supported on piecewise polygonal domains or extend the problem to higher dimensions. We refer to [DP19b] for a rigidity result for the two-well problem in three dimensions with piecewise affine boundary conditions.
Let us comment on some of the main new ingredients leading to the construction of convex integration solutions with higher Sobolev regularity in the geometrically non-linear two-well problem:
- •
Matrix space geometry and . In order to construct convex integration solutions to (2)–(8) which enjoy higher Sobolev regularity a central step is the construction of suitable “orthogonal” coordinates for . These allow us to move along a rank-one line in when varying one of the coordinates. In order to avoid dealing with rotations, we investigate this in the Cauchy-Green space associated with , that is the set of symmetric positive definite matrices for . This further has the advantage that the projection of onto Cauchy-Green space is (a subset of) a two-dimensional manifold which is well-understood. However, some attention must be paid to relate objects in to objects in its Cauchy-Green space. In particular, in order to exploit our self-improving replacement construction (see Lemma 4.1), we rely on Lipschitz bounds in order to pass from relevant quantities in matrix space to their projections in Cauchy-Green space (see Lemmas 2.5, 2.7). For our convex integration algorithm (see Section 6), it is important that all dependences are explicit in order to achieve the higher Sobolev regularity of . Thus, a good understanding of the geometry of is crucial (see Section 2 below).
- •
A quantitative replacement construction. Another important ingredient is the replacement construction (see Lemma 4.1 below) which we use at every iteration step of the convex integration algorithm to improve on the present gradient distribution and thus to move closer to in some sub-region of our domain. Here, we rely on an explicit construction from [Con08] which we complement with explicit quantitative bounds, necessary to prove the estimates of higher Sobolev regularity of following the algorithm in [RZZ18].
With the these two ingredients in hand, it is possible to embed the geometrically non-linear two-well problem into the framework of [RZZ18] and to thus deduce the existence of convex integration solutions with higher Sobolev regularity for the geometrically non-linear two-well problem for the first time. As in [RZZ18] we here do not optimize the constants in our construction but rather focus on the main qualitative dependences, leading to good uniform dependences on the Sobolev exponents (see the discussion at the end of Section 1.2). As a consequence, our regularity threshold can be chosen uniformly for affine boundary data in (with norms that deteriorate for boundary data close to the boundary of ).
Remark 1.3**.**
We remark that in contrast to the construction from [RZZ19] we here rely on a convex integration scheme using a countably infinite sequence of replacements (see the discussion in [RTZ18] comparing a countably infinite with a finite scheme for the geometrically linearised hexagonal-to-rhombic transformation). An interesting alternative matrix space construction is given in [BJ92] which could constitute the core of a convex integration construction for which at almost every point in matrix space only finitely many replacement steps are considered (with the number of replacements however depending on the point under consideration). In order to exploit this matrix space construction in a convex integration algorithm, one would however need to make use of a special replacement construction (cf. Lemma 4.1 below) at which a fixed endpoint is deformed “non-perturbatively” (see [RZZ19] for such a construction in the case of the geometrically linearised hexagonal-to-rhombic phase transformation). As we are not aware of such a replacement construction which also allows one to preserve the determinant, we do not pursue this further here. For special settings in which highly symmetric replacement constructions exist, we refer to [CDPR*+*19, CKZ17].
Relying on an idea by Ball and James [BJ92], we complement our result of Theorem 1 by also showing that for the two-well problem with only one rank-one connection no convex integration solutions exist for affine boundary conditions (see Proposition 8.4).
1.2. Relation with the literature on the two-well problem
Compared to other phase transformations which allow for the presence of convex integration solutions, the geometrically non-linear two-well problem is relatively well-studied (although still important questions – in particular in the context of convex integration and scaling limits – are open) which makes it an attractive model problem. In the context of our problem the most relevant known results are:
- •
Dichotomy rigidity-flexibility. Due to the work [MŠ99, DM95, DM12, DM96] it is known that in the limiting cases of and regularity the differential inclusion (2) with as in (3), (8) is rigid for regular solutions while it is highly flexible for merely regular solutions.
- •
Convex hulls. The convex hulls of the set are known and explicit (see [Š93, Ped97]) which is crucial for our detailed matrix space analysis and the construction of “orthogonal” coordinates.
- •
Scaling. The scaling behaviour for minimisers of energies involving elastic and surface contributions is determined for in [CC15, CC14]. In particular, the arguments of [CC15] persist if showing analogous scaling results for these boundary conditions. While there are no convex integration solutions in this setting (see [BJ92, Ped97]), these scaling results do constitute a very important step into the further analysis of the scaling behaviour for the two-well problem (and suggest that the scaling and, associated to that, the convex integration regularity thresholds for boundary data are probably not better than the ones for ).
In [Lor06] the scaling of a continuum two-well model is linked to a corresponding discrete model showing that optimal bounds in one of these lead to optimal bounds in the other one.
- •
Rigidity results. Various rigidity type results (in the presence of small surface energies or in the setting of only one rank-one connection) are known [JL13, CS06b, CS06a, CC10, DF18, KLLR19].
In view of the results of [RTZ18] and [CC15], in particular further scaling results would be of considerable interest as they could provide important hints at the optimal regularity of convex integration solutions and thus at regularity as a selection mechanism for minimizers of (1) in the presence of convex integration solutions. However, in order to exploit this connection, it would be necessary to study the scaling behaviour functionals involving bulk and surface energies subject to affine boundary conditions such that which we do not address here. In this framework, our Theorem 1 provides an important first step towards understanding the dichotomy rigidity-flexibility for the two-well problem, and enlarges the function space where exact solutions to (2) exist.
1.3. Outline of the article
The remainder of the article is organized as follows: In Section 2 we discuss the matrix space geometry of the two-well problem and introduce our main coordinates (which we define in Cauchy-Green space). Based on this, in Sections 3-6, we combine the two-well matrix space geometry with the convex integration framework from [RZZ18]. In Section 7 we recall the connection between regularity estimates and (partial) upper and lower bounds for a suitably defined notion of dimension of the singular set of the deformation/ the underlying characteristic functions. Relying on ideas from [BJ92], in Section 8, we show that in the two-well problem with only one rank-one connection no convex integration solutions exist. Finally, for the convenience of the reader in the appendix, we collect the notation that we are using throughout the article.
2. Matrix Space Geometry
In this section we study the matrix space geometry of the two-well problem. As central observations we obtain a system of two rank-one connections which we will crucially exploit in our convex integration algorithm (see Lemmas 2.5, 2.7).
Consider the set
[TABLE]
where are respectively given by
[TABLE]
and We remark that, as shown in [BJ92, Sec. 5], given two wells with two rank-one connections, one can always reduce the problem to our case via an affine change of variables. Moreover, we note that the two wells in (14) can be transformed into the wells
[TABLE]
where and
[TABLE]
Remark 2.1**.**
We notice that
[TABLE]
for each The wells are thus separated.
We are now interested in the set , where for any compact set , is given by
[TABLE]
that is the set of constant macroscopic deformation gradients which can be obtained by finely mixing the martensitic variants We define as , where the sets are defined recursively by and
[TABLE]
for any , for any compact set When is defined as in (9), we have that [BJ92, Š93]
[TABLE]
where is the convex hull of .
2.1. Coordinates in Cauchy-Green space
The following result from [BJ92, Ped97] gives more precise information on (see also Figure 1):
Proposition 2.2** ([Ped97], Chapter 5.3).**
The set of macroscopically attainable boundary conditions for as in (9) is characterized by the conditions
[TABLE]
Here is the Cauchy-Green tensor associated with the macroscopic deformation and denote its components.
We remark that by the determinant constraint .
This result relies on two arguments: The necessary condition is determined by a discussion of the necessary condition for gradient Young measures which are supported in . This in particular uses the fact that the determinant is weakly continuous.
The second step yielding sufficiency and thus attainability relies on an explicit construction of a suitable double laminate.
Below we denote by the relative interior of in the manifold \Sigma:=\bigl{\{}\mathsf{F}\in\mathbb{R}^{2\times 2}:\det\mathsf{F}=1\bigr{\}}. We notice that the two wells , are rank-one connected in the following way:
[TABLE]
where \mathsf{R}=\frac{1}{1+\delta^{2}}\left[\begin{array}[]{ ccc }1-\delta^{2}&2\delta\\ -2\delta&1-\delta^{2}\end{array}\right]\in SO(2). We remark that the second rank-one connection corresponds to the one coming from (in this sense the two rank-one connections are “symmetric”). Let us hence define
[TABLE]
We have the following lemma:
Lemma 2.3**.**
For any there exist , such that
[TABLE]
Furthermore,
[TABLE]
with
[TABLE]
and
[TABLE]
Proof.
We first give the argument for : In this case we note that the matrices and are of the same form as , , where however is replaced by . As a consequence, we have the same rank-one connection as in the second identity in (22) now with replaced by , i.e.,
[TABLE]
Here \mathsf{R}_{1}=\mathsf{R}_{1}(\tilde{\delta})=\frac{1}{1+\tilde{\delta}^{2}}\left[\begin{array}[]{ ccc }1-\tilde{\delta}^{2}&2\tilde{\delta}\\ -2\tilde{\delta}&1-\tilde{\delta}^{2}\end{array}\right]. Rewriting (28) in terms of implies the claim.
For we make use of a different approach. We argue by first deducing necessary conditions for the presence of a rank-one connection and then show that these are also sufficient. Let us first notice that, if there exists such that (23) is satisfied, then there exist such that . Some computations imply that is either parallel to or to . We can hence choose either equal to or to . The first case is trivial, and gives . We hence focus on the case Since , by taking the determinant of (23) we have
[TABLE]
and therefore, As a consequence must be as in (25). As a consequence, if we can find such that
[TABLE]
polar decomposition gives (23). A calculation shows that this is indeed solvable with as claimed. ∎
Let us now define
[TABLE]
for (see Figure 2). Spelling this out, we have
[TABLE]
Remark 2.4** (Symmetries).**
We remark that the expressions for , enjoy good symmetries with respect to switching : For
[TABLE]
For fixed we think of and in particular of as coordinates on the manifold . Each coordinate representation (or ) is particularly well-adapted to one of the rank-one connections from Lemma 2.3. Further, as we shall see in Lemma 2.5 and in Lemma 2.7 (see also Figure 3 below) these coordinates are “orthogonal” in the Cauchy-Green space. Indeed, by varying in (resp. ) we can change (resp. ) by keeping (resp. ) constant.
Using the representations (33), (36) and Proposition 2.2, it is immediate to verify that
[TABLE]
As a consequence, for any there exists and such that
[TABLE]
Thanks to Proposition 2.2 and the explicit form of the Cauchy-Green tensors (33), (36), if and only if ,
Lemma 2.5**.**
Let for some and some . Let further . Then, for any , there exists such that
[TABLE]
In particular, .
Furthermore, if and , there exists a constant such that for \chi=\operatorname{sgn}\bigl{(}\bigl{(}\frac{1}{2}-\mu\bigr{)}\bigl{(}\frac{1}{2}-\mu^{*}\bigr{)}\bigr{)}
[TABLE]
and
[TABLE]
Remark 2.6**.**
We remark that the Lipschitz dependence of (38) and (39) in terms of plays a crucial role for our argument in the sequel. It will allow us to make use of “self-improving” error estimates (see also the remarks following Lemma 4.1 and the argument for Lemmas 4.3, 5.3). It is this “self-improvement” which in the sequel allows us to obtain exponential instead of super-exponential estimates.
Proof.
We first prove that for we have
[TABLE]
where \chi=\operatorname{sgn}\bigl{(}\bigl{(}\frac{1}{2}-\mu\bigr{)}\bigl{(}\frac{1}{2}-\mu^{*}\bigr{)}\bigr{)}. To this end, we note that
[TABLE]
Solving the equation , we obtain the two solutions
[TABLE]
which can be rewritten as in (40). Then, using the definitions (30) and the expression for , we solve the identity
[TABLE]
for . This leads to and hence the desired decomposition (37) holds. The fact that is a direct consequence of the form of the Cauchy-Green tensor in (33). In order to infer the second identity in (40), it just remains to prove that can be written as in (40). But this is true as can be written as
[TABLE]
where . Therefore,
[TABLE]
In order to deduce (38), it therefore remains to estimate the quantities in (40). Exploiting (41) in combination with the assumption that , we obtain
[TABLE]
for some constant . Assuming without loss of generality, that and Taylor expanding the square root, we then deduce that
[TABLE]
with depending only on (as ). Arguing similarly in the cases that and noting that is impossible by the above smallness assumptions hence concludes the proof. ∎
In a similar way we also obtain an analogous splitting result in the second rank-one system:
Lemma 2.7**.**
Let for some and some . Let . Then, for any , there exists such that
[TABLE]
In particular, .
Furthermore, if and , there exists a constant such that for \chi=\operatorname{sgn}\bigl{(}\bigl{(}\frac{1}{2}-\mu\bigr{)}\bigl{(}\frac{1}{2}-\mu^{*}\bigr{)}\bigr{)}
[TABLE]
and
[TABLE]
Proof.
The argument proceeds along the same lines as the proof of Lemma 2.5. We hence omit the details. ∎
3. In-Approximation
In this section, we discuss the in-approximation which we will be using in the sequel (see also Figure 3).
Definition 3.1**.**
Let , , let and denote by the associated Cauchy-Green tensor. We set , and
[TABLE]
Further we define
[TABLE]
We claim that a suitable subset of these sets form an in-approximation for the two-dimensional geometrically non-linear two-well problem. We start by giving the definition of in-approximation which we will be using in the sequel:
Definition 3.2**.**
Let be as in (9). We say that a sequence of relatively open sets is an in-approximation of in if:
- •
* for each ,*
- •
.
Remark 3.3**.**
Let and let . Then, as the set forms a co-dimension one manifold which locally coincides with , for any small enough, . For this reason, a sequence of sets relatively open in is also relatively open in the set .
The following result holds:
Lemma 3.4**.**
Let , and let the sets be defined as in Definition 3.1. Then they form an in-approximation for the two-well problem with as in (9).
Proof.
Let be a sequence such that . Then, by definition, is such that , , for some , and . As a consequence, .
Hence it remains to prove that . We argue in the case even, as the case odd can be treated similarly. Then, if for some , we apply Lemma 2.7 to obtain a decomposition
[TABLE]
such that
[TABLE]
By symmetry (see Remark 2.4) the same also holds for and as , we infer that , and thus which proves the claim. ∎
Remark 3.5**.**
Let us comment on our choice of in-approximation: Our in-approximation is designed in such a way that for the sets approximate the energy wells (in Cauchy-Green space) dyadically. We seek to iteratively move from to (when ) by splitting along rank-one segments.
The sets and are less restrictive than the sets with , in that any datum in which is not already in a dyadic neighbourhood of the wells is contained in these. However, the full sequence is not an in-approximation. Indeed, for , the inclusion does not hold in general. Nonetheless, using the splitting results from Lemmas 2.5, 2.7, any can be moved within two replacement constructions from to some (not necessarily the first) dyadic neighbourhood , , of the wells (see Lemmas 4.2, 5.2).
4. The Replacement Construction in Suitable Diamond-Shaped Domains
In this section we recall the non-linear replacement construction from [Con08]. Together with the matrix space geometry discussed in the previous section, this will serve as the building block for our replacement construction and will allow us to verify the conditions (A2), (A3), (A4) from [RZZ18] (which will be recalled and explained in Section 5 below).
Lemma 4.1** (Lemma 2.3 in [Con08]).**
Let and . Let with , and . Then there exists a domain with , and a deformation such that for some constant which does not depend on or
- (i)
* on ,*
- (ii)
* attains five values and its level-sets are the union of (up to a set of measure zero) two disjoint open triangles, each of perimeter less than *
- (iii)
* a.e. in ,*
- (iv)
* a.e. in ,*
- (v)
* for any .*
- (vi)
Assuming that we have
[TABLE]
If the bounds in (iv) are reversed.
Let us comment on this construction. For our purposes crucial properties of this replacement construction are:
- •
The preservation of the determinant constraint. This allows us to use this replacement construction iteratively without leaving the set . Precursor constructions of this can be found in [MŠ99] and [CT05]. The construction from [Con08], however, is most convenient for us as all controls are explicit and only a small number of deformation gradients are involved.
- •
In the properties (iv)-(v) there is a “self-improvement” of the errors in the construction as soon as with . Indeed, in our application of the replacement construction (see Lemmas 4.2, 4.3) for , we will need to ensure that
[TABLE]
in order to ensure that the replacement function a.e. in . As the splitting from Lemmas 2.5, 2.7 allows us to choose , and since in our two-well setting , we are always able to achieve the desired error estimate in (46) with a uniform choice of (independent of ). We will exploit this heavily in deriving exponential (in contrast to super-exponential) estimates.
- •
The volume fractions in the replacement construction in (vi) are “self-improving”. Indeed, if as in the remark above we take , with and we obtain that the proportion of the domain which is not in the same well as will also be proportional to . This plays a crucial role for our argument as it will yield geometrically improving estimates.
Proof.
We only sketch the proof as the main difference with respect to the argument in [Con08] is the quantitative dependence of the estimates on . In particular, properties (i)-(iii) do not require any modifications. We note that, since , there exist such that . By subtracting , rescaling by , rotating, and finally adding the identity matrix, we can replace by
[TABLE]
by and by for some such that and . Further, without loss of generality . We first construct a deformation gradient as in Figure 4 (left), where
[TABLE]
with , as in [Con00]. This is possible by using that both and as well as and are rank-one connected. The choice of is determined by the requirement of preserving the determinant. We note that at the points , , , the function can be chosen to be equal to the identity map.
In order to match the boundary conditions in (i), we then define to be equal to in the orange, the green, and the blue regions of Figure 4 (right). In the red and yellow regions we define by affine interpolation of the values at the corner points (in particular, the desired boundary conditions are then satisfied on the whole boundary of the diamond). This leads to and respectively. Here,
[TABLE]
where
[TABLE]
In order to obtain (iv) outside of the interpolation region, we estimate
[TABLE]
Choosing and recalling that implies the claimed estimate for the non-interpolation regions (orange, blue and green regions in Figure 4). For the interpolation regions we start by noticing that
[TABLE]
As a consequence,
[TABLE]
With this in hand, the estimate from (v) follows from the fundamental theorem. Assume without loss of generality that (the other case can be treated similarly), then
[TABLE]
where denote the subintervals of the segment connecting and in which is closer to or respectively. Noting that and then concludes the argument.
Last but not least, the estimate on the volume fraction of and follows from the observations that
- •
the whole diamond has volume ,
- •
the set is given by the orange and blue domains in Figure 4 which has volume
As a consequence, we obtain the claims in (vi). ∎
4.1. Covering in diamond shaped-domains
With Lemma 4.1 in hand, we can formulate a replacement construction satisfying strong perimeter bounds in the special diamond-shaped domains with , which we had introduced in the previous section. As in [RZZ18], we discuss the cases with boundary conditions , , and , , separately. We begin by introducing a replacement construction for deformation gradients with .
Lemma 4.2**.**
Let with . Then there exist
- •
a diamond-shaped domain with ,
- •
a piecewise affine deformation ,
such that
- (i)
* a.e. in for some ;*
- (ii)
* on ;*
- (iii)
the level sets of consist of four pairs of disjoint open triangles and one parallelogram (which can again be split into two open triangles up to a set of measure zero);
- (iv)
if denote the open triangles from (iii) forming the level sets of (after splitting up the parallelogram), then
[TABLE]
Proof.
We split the proof into two cases:
*Case . * Let be the integer such that . In this case we move from into by improving on the component. More precisely, setting with , , using Lemma 2.7, we split
[TABLE]
with and where
[TABLE]
We recall that along such a splitting using the “ coordinates” the component remains unchanged, that is
[TABLE]
In order to obtain a suitable error estimate in the construction of Lemma 4.1, we now notice that, as is a bounded compact set, and as is Lipschitz in in any bounded set, there exists depending on only such that
[TABLE]
for all We choose (depending on ) so small that
- •
for the error estimate in Lemma 4.1 (iv) and the constant from (47) we have
[TABLE]
where
[TABLE]
and where is as in Lemma 4.1,
- •
for the deformation gradient from Lemma 4.1 we have
[TABLE]
Using this error bound together with the estimate (iv) in Lemma 4.1 and (47) gives a diamond shape domain and a map such that
[TABLE]
which implies that a.e. in . The remaining properties (ii)-(iv) are direct consequences of the corresponding properties of the construction from Lemma 4.1.
*Case . * In this case there exist such that
[TABLE]
We set and let be defined as the smallest positive integer strictly larger than . We then carry out a splitting improving . More precisely, we set and invoke Lemma 2.5 to obtain
[TABLE]
such that . Invoking the replacement construction from Lemma 4.1 and choosing the error (depending on ) sufficiently small (cf. case ) then yields a new deformation such that . ∎
We emphasize that a key requirement in the replacement construction of Lemma 4.2 is to ensure that with a.e. in . Relying on the replacement construction of Lemma 4.1, this necessitates that is allowed to depend on . In particular, this yields highly non-uniform estimates on the aspect ratios of the diamond-shaped domains . This will also be reflected in our argument on general covering results (see Section 5).
If with , we infer a more detailed result. In particular, on the one hand, the bounds in (iv) will be crucial in obtaining strong geometric convergence. On the other hand, the possibility of choosing uniformly, independently of , will allow us to obtain exponential (instead of super-exponential) estimates.
Lemma 4.3**.**
There is a universal constant such that for any with there exist
- •
a diamond-shaped domain ,
- •
a piecewise affine deformation ,
- •
a domain consisting of a union of level sets of ,
- •
constants and independent of and with ,
such that
- (i)
* for almost every ,*
- (ii)
* on ,*
- (iii)
(up sets of measure zero) the level sets of consist of 10 open triangles,
- (iv)
* on and ,*
- (v)
if denote the open triangles forming the level sets of , then
[TABLE]
Proof.
We first assume that is even, and we denote . Let . Given , by Lemma 2.7 there exists with and
[TABLE]
such that
[TABLE]
In particular, by our choice of , we obtain that for we have
[TABLE]
Since and by the explicit expressions for the Cauchy-Green tensor (36), we may assume that and
[TABLE]
Without loss of generality, we may further suppose that , whence, by (38), we also infer that for a universal constant
[TABLE]
where denotes the function from Lemma 2.7. Choosing
[TABLE]
with being the constant from Lemma 4.1 (iv), being as in (47), and applying the construction from Lemma 4.1 then yields that the error in the replacement construction from Lemma 4.1 (iv) satisfies
[TABLE]
Here we used also the fact that . Thus, by property (iv) in Lemma 4.1 together with (47), we infer that a.e. in . The claimed properties (ii), (iii) and (v) then also follow from the corresponding statements from Lemma 4.1. It remains to argue that (iv) holds. To this end, without loss of generality, we assume that and note that in
[TABLE]
we have
[TABLE]
which proves the first part of the claim in (iv) with . The claim on the volume fractions then follows from the first estimate in Lemma 4.1 (vi) with . Indeed,
[TABLE]
If is odd, then we may argue similarly as above where the splitting using the coordinates is replaced by the splitting using the coordinates (using Lemma 2.5 instead of Lemma 2.7 in order to improve the component). Since for any (with odd), the component is contained in , with , by choosing sufficiently small (but universal, cf. with case even) the replacement gradient from Lemma 4.1 is contained in a.e.. ∎
5. Covering
Having established the covering in the diamond-shaped domains from the previous section, we recall the two-dimensional covering algorithm with good perimeter bounds which had been introduced in [RZZ18] (see Section 6.1 therein). Although the arguments leading to Lemma 5.2 are generic properties of coverings in and do not depend on the phase transformation under consideration, we recall their proof for self-containedness.
We remark that the set of diamond-shaped domains is not “closed” with respect to iterating the construction: the level sets within the diamond-shaped domains which are covered in the next iteration step are triangles and not again diamond-shaped domains. Hence, any “closed” set with respect to the iteration of our algorithm has to contain the set of resulting triangles. As a consequence we define the following families of sets (see Figures 5, 6):
Definition 5.1**.**
We denote by the set of all possible open triangles. Let be a rhombus with two orthogonal axes of length respectively, with its long axis pointing into the direction . Then, by we denote the set of open isosceles triangles of angles , and which are symmetric about .
We deal first with the case in which the data (to be replaced with a deformation gradient closer to the wells) are not yet in a dyadic neighbourhood of the wells, i.e., where with .
Lemma 5.2** (Validity of condition (A3) in [RZZ18]).**
Let , and let be an open triangle. Then there exist
- •
a piecewise affine function whose gradient only attains finitely many values and whose level sets consist of the triangular domains ,
- •
a domain which is itself a union of finitely many open triangles (up to a set of measure zero),
- •
and a constant , which is independent of ,
such that
[TABLE]
for some . Moreover, there exists (depending on ) such that the following perimeter bounds hold:
- (i)
If there exists a constant which is independent of such that
[TABLE]
- (ii)
If , then there exists a uniform constant (independent of and ) such that
[TABLE]
- (iii)
If , then there exists an up to null-sets disjoint splitting of with , such that
[TABLE]
Here are the constants from (i), (ii) respectively. In particular, may depend on , while is uniform.
We remark that in Lemma 5.2 the perimeter bounds are not always uniform, since in order to move from and it might be necessary to use extremely degenerate building block diamond-shaped constructions as in Lemma 4.1. This is taken into account in the cases (i) and (iii) above in which we allow for the constant to depend on . A crucial observation here is that in our convex integration algorithm (see Algorithm 6.1) this constant will only arise at most three times in our estimates, allowing us to conclude uniform exponential behaviour (independent of ) for the norms (see Lemma 6.4).
Proof.
Given we seek to repeatedly use the replacement construction given by Lemma 4.2 to prove the claimed result. Therefore, throughout the proof, we denote by and the rotation and rhombus given by Lemma 4.2 (with boundary data ), and by the family of related isosceles triangles given by Definition 5.1 (with and as in Lemma 4.2).
We split the proof into three parts: first we discuss a replacement construction for triangles . Next we discuss an auxiliary covering construction in a special rectangular domain. Finally in the third step, we use this to deduce the covering for general triangles.
Step 1: Replacement construction for the triangles in . Assuming that is an isosceles triangle in , one can cover by a scaled version of the diamond-shaped domain , for some , and two remaining triangles , (see Figure 5, left). It is possible to choose such that half of the area of is covered by . Within the diamond , one can apply the construction from Lemma 4.1 and replace the affine deformation by the piecewise affine deformation from Lemma 4.2 which fixes the boundary conditions on . In , by the construction from Lemma 4.2, we obtain that with a.e.. Moreover . Due to the preservation of the values of the deformation on , in the remaining two triangles we do not change . As the level sets of as well as the triangles have a perimeter which is comparable to the perimeter of , we infer the bounds in (ii).
Step 2: Replacement construction in a rectangle for some , , and where we recall that . Stacking diamonds from Lemma 4.2 (see Figure 5, right) allows us to cover with many diamonds , many isosceles triangles in , and four remaining triangles. In the diamonds we apply the construction from Lemma 4.2, in the remaining sets we keep the deformation unchanged. Defining to be the union of the stacked sets , the properties of the construction from Lemma 4.2 imply that (48) holds with . The perimeter of the covering level sets is controlled by
[TABLE]
where is a constant which is independent of , , , .
Step 3: Replacement construction in a generic triangle which is not in the class . Without loss of generality, we may assume that the triangle is right-angled (else we draw an appropriate perpendicular line and split it into two triangles where the construction below can be applied). Then, we cover (up to a null set) the triangle by a rectangle of volume and two self-similar triangles whose perimeter is smaller than . Denoting the lengths of the orthogonal sides of by , with , the rectangle then has sides of length . We cover the rectangle with axis parallel squares with sides of length . At least half of can be covered by the squares (see Figure 6). Finally, at least half of each square can be covered by , for some and where brings one side of into Now we can apply the construction of Step 2 to cover the rectangle (that is at least half of ), and the rest of can be divided into two triangles whose perimeter is bounded by the perimeter of . Therefore, in each we have exactly new triangles in , ten new triangles in and new triangles in Again, the perimeter of each of these triangles is bounded by the perimeter of . Since we obtain the sought result with , and . ∎
We now consider the situation in which with :
Lemma 5.3** (Validity of conditions (A4) and (A5) in [RZZ18]).**
Let , and let . Then there exist
- •
a piecewise affine function whose gradient only attains finitely many values and whose level sets consist of the triangular domains ,
- •
domains which are themselves a union of finitely many triangles,
- •
and constants and with , which are independent of and ,
such that
[TABLE]
Moreover, the following perimeter bound holds for the new level sets: There exists a constant which is independent of and such that
[TABLE]
We remark that in contrast to Lemma 5.2 all estimates here are uniform in . This allows us to obtain uniform decay and growth estimates in Section 6.
Proof.
The proof proceeds as the one from Lemma 5.2, however instead of invoking Lemma 4.2 we now rely on Lemma 4.3. In particular, the ratio of the diamond shaped domains is now fixed (and independent of ). So all constants appearing in the covering are uniform (depending only on which is uniform). The set is defined as the union of the sets from the associated diamond-shaped domains. As in the proof of Lemma 5.2 we also obtain that . As a consequence, the estimates in the second and third line of (49) then follow from the corresponding statements in Lemma 4.2. ∎
6. The Convex Integration Algorithm
In this section we combine the previous observations and deduce the desired higher Sobolev regularity of our deformations. Here we follow the general scheme from [RZZ18] and combine the general covering results from the previous section with the properties of the two-well problem.
6.1. The convex integration algorithm
For the convenience of the reader we begin by giving a rough outline of the convex integration algorithm from [RZZ18]. In the present setting of the two-well problem, it is possible to slightly simplify the algorithm.
Algorithm 6.1**.**
Let satisfy (D) and . Let be the minimum of the corresponding constants from Lemmas 5.2 and 5.3. Then, we apply the following iterative modification scheme:
- (1)
Data and initialization.* For , , we consider the following data:*
- (i)
A piecewise affine, uniformly bounded deformation .
- (ii)
A finite collection of sets consisting of pairwise disjoint sets whose union is (up to null-sets) , and such that .
- (iii)
An index with the property that for it holds that .
We then initialize our construction by defining
[TABLE]
\hat{\Omega}_{0}=\{\text{triangles that cover \Omega as explained in the condition \eqref{eqDomain}}\}* and for all .*
We prescribe the algorithm inductively. Let and a triple be given. Then, if
[TABLE]
In both cases Lemmas 5.2 and 5.3 return
- •
a replacement construction which is piecewise affine and whose gradient has finitely many, (up to null sets) pairwise disjoint level sets which are all contained in and whose union (up to null sets) is ,
- •
a subset consisting of finitely many level sets of such that
[TABLE]
We further define ,
[TABLE]
By Lemma 3.4 in [RZZ18] the algorithm is well-defined and the quantity is monotone increasing. With each point and the deformation we then associate a characteristic function:
Definition 6.2**.**
Let satisfy (D), and let be such that . In we define to be the indicator function on the set
[TABLE]
and extend it to be zero in . We further define If , where is the mapping obtained at the th iteration step of the Algorithm 6.1, we write rather than .
Controlling the and norms of these characteristic functions along the iteration of the convex integration algorithm of Algorithm 6.1 then allows to conclude the desired higher regularity statement for their limits.
6.2. estimates
Next we recall how the properties of the replacement constructions from Lemmas 5.2, 5.3 together with the explicit convex integration algorithm yield strong exponential decay bounds:
Proposition 6.3**.**
Let satisfy (D). Assume further that is the mapping obtained at the th iteration step of the Algorithm 6.1. Then, there exists , independent of such that
[TABLE]
for .
Proof.
We discuss the argument for the characteristic functions and the gradients simultaneously.
To this end, we first present an estimate in the th step of the algorithm for which it is enough to prove estimates for every . Then, in a second step, we collect all the bounds to prove an estimate on .
Step 1: Local estimates. Let We first notice that by Lemma 5.3 there exists such that
[TABLE]
By virtue of the separateness of the wells (see Remark 2.1), we thus obtain that
[TABLE]
for some . Therefore, Lemma 5.3 together with (51) yield
[TABLE]
Using once more Lemma 5.3 we deduce that
[TABLE]
that is
[TABLE]
provided We notice that, by taking , (52) holds also when
Similarly, (50) together with the bounds from Lemma 5.3 and the boundedness of imply that
[TABLE]
if . Arguing similarly as above, we can then also extend this estimate to all values of .
Step 2: Global estimate. By applying repeatedly the estimate obtained in (52) to every we obtain
[TABLE]
By arguing as in [RZZ18, Lemma 4.5] we deduce that satisfies
[TABLE]
for some independent of . Combining (53)–(54) we thus proved the claimed result for the characteristic functions.
For the difference of the gradients, we argue analogously and infer that
[TABLE]
Hence, combining (55) with (54), then implies the desired result. ∎
6.3. estimates
In order to deduce the desired regularity of our deformation, we complement the estimates with bounds. As the limiting deformations are not in BV in general, we expect bounds which grow in . Following [RZZ18] we prove exponentially growing bounds:
Lemma 6.4**.**
Let satisfy (D). Let be as in Definition 6.2. Then, for
[TABLE]
for some , and where are as in Lemmas 5.2 and 5.3.
Remark 6.5**.**
In general, the constant depends on . It deteriorates as approaches the boundary .
In order to work with a concise notation, we recall the concept of a descendant of a domain:
Definition 6.6** (Def. 3.3 in [RZZ18]).**
Let for some Then we say that for some is a descendant of if We denote the set of all descendants of by .
We are now ready to prove Lemma 6.4:
Proof.
We notice that, since
[TABLE]
it is enough to prove an upper bound for . To this aim, let , we start by noticing that, thanks to Lemma 5.2 and Lemma 5.3 we have
[TABLE]
where , and are as in Lemma 5.2 and Lemma 5.3. As a consequence,
[TABLE]
Now, if
[TABLE]
we have
[TABLE]
Otherwise, since may depend on the boundary condition , some extra work is needed. An argument as in the proof of Lemma 4.7 in [RZZ18] allows one to prove that, given any sequence of sets with , there exists at most three indices such that for all other we have . Indeed, we observe that only if we are in case (i) or in the first case of (iii) of Lemma 5.2. In the former case, we have improved from being in to being in with . In the latter case, we will do so in the next step. As a consequence,
[TABLE]
Therefore, by the last identity together with (56) we conclude the proof of Lemma 6.4. ∎
6.4. bounds
An important tool to deduce a bound on the norm for is the following interpolation result (which is an adaptation of the estimates in [CDDD03], see Theorem 2, Corollary 2.1, Remark 2.2 in [RZZ19] for the adaptation which we are using here):
Proposition 6.7** ([CDDD03]).**
Let , , and such that . Then,
[TABLE]
As a consequence of this interpolation result, by Proposition 6.3 and Lemma 6.4 we deduce the desired convergence of the characteristic functions of the phases and the deformation gradients:
Corollary 6.8**.**
Let satisfy (D), and with be as in Definition 6.2. There exists a constant and a regularity threshold such that, for any satisfying there exists with
[TABLE]
Proof.
Thanks to Proposition 6.3, Lemma 6.4 and Proposition 6.7 it is enough to choose such that
[TABLE]
where is as in Proposition 6.3, and are as in Lemma 5.2 and Lemma 5.3. Indeed, if , we obtain
[TABLE]
The fact that thus implies that for some , and therefore the claim follows. ∎
Now with the previous results in hand, the proof of Theorem 1 follows immediately.
Proof of Theorem 1.
The existence of and the fact that in follows from the fact that, by Corollary 6.8, is a Cauchy sequence (which follows from a telescope sum argument).
We note further that , since for every and for every there exists such that for
[TABLE]
To observe this, we use the volume improvement of the good sets in Lemmas 5.2 and 5.3. Indeed, after at least steps the volume condition that in each step implies that on a set of volume of size at least we have (or an even better set ). Here we used that the function in Algorithm 6.1 is increasing. Hence, for after iteration steps at least on a volume fraction of size
[TABLE]
we have for some . Choosing such that then yields that satisfies the claimed estimate (57). As this in particular implies that in for any as . ∎
7. Dimension of the singular set
After having deduced higher regularity for our convex integration solutions for the two-well problem in the previous section, we next recall that this has direct implications on their singular sets and the regularity of the phase boundaries. In order to observe this, we invoke singular set estimates for Sobolev functions (see for instance [JM96, Sic99]).
Let us recall that, given a set , the Box-counting dimension is defined as
[TABLE]
whenever the above limit exists. Here the number is the number of cubes of side lengths needed to cover .
Not requiring the limit to exist (see for instance [Mat99, Chapter 5] for a discussion on this possibility), we define
[TABLE]
and
[TABLE]
We start by providing a lower bound on the Box dimension of depending on the regularity of . Here denotes the characteristic function of some set .
Proposition 7.1**.**
Let and be such that for any satisfying , but for any satisfying . Then, .
Proof.
Suppose for a contradiction that
[TABLE]
Then, there exists such that and . But then we can apply [JM96, Proposition 2.1 in Chapter II] (which works under our definition) to deduce that with , contradicting our assumptions, and thus leading to the claimed result. ∎
Remark 7.2**.**
Improving the optimal regularity of to for any satisfying , with , decreases the lower bound for .
Remark 7.3**.**
In the case that the limit in (58) exists Proposition 7.1 turns into a statement of the true box-counting dimension.
Applying Proposition 7.1 to the sets and from Theorem 1, we thus obtain that
[TABLE]
where is the exponent from Theorem 1.
Given and let us now consider the thickened set
[TABLE]
where denotes the ball centred at of radius . Denoting by the packing dimension (see [Mat99, Fal04]) and invoking [Sic99, Proposition 3.3] (or [JM96, Thm 2.2]), we arrive at
[TABLE]
Applying this to our sets and , we hence obtain that
[TABLE]
Remark 7.4**.**
We remark that as the definition of the set contains a density statement, the dimension of might be substantially larger than indicated by the estimate obtained above.
8. The two-well problem with one rank-one connection
In this section we consider the problem
[TABLE]
where are respectively given by
[TABLE]
and . In this case there is only one rank-one connection between the wells (see for instance [DM95, Proposition 5.1] for this). Exploiting arguments by Ball and James [BJ92], we prove that in this phase transformation there are no convex integration solutions (at least for affine boundary conditions) and all gradient Young measures (with affine boundary conditions) are (unique) simple laminates.
As a first step into this direction, we observe that the lamination convex hull is two-dimensional:
Lemma 8.1**.**
Let be as above. Then,
[TABLE]
Proof.
This is immediate by computing first order laminates. By [DM95, Proposition 5.1] these are always of the form
[TABLE]
with . As this yields the set on the right hand side of (67) this implies that first order laminates are exactly of the same structure as the original wells. Hence, invoking Proposition 5.1 in [DM95] once more, we infer that two matrices in also have only one rank-one connection, and that can be satisfied by \mathsf{A}=\left[\begin{array}[]{ ccc }1&0\\ 0&1-\delta+2\lambda_{1}\delta\end{array}\right],\mathsf{B}=\left[\begin{array}[]{ ccc }1&0\\ 0&1-\delta+2\lambda_{2}\delta\end{array}\right]\in K^{lc,1}, and some , if and only if and . Thus further lamination does not provide a larger lamination convex hull. ∎
We use a trick due to Ball and James to characterise the quasiconvex hull of :
Lemma 8.2**.**
Let be as above, then
[TABLE]
Proof.
Let us assume without loss of generality that We start by considering the function given by
[TABLE]
which is polyconvex, i.e., a convex function of the determinant and the minors. As a consequence is also quasiconvex (see [Mül99, Dac07]), and hence
[TABLE]
that means, for any Now, we note that the functions
[TABLE]
are quasiconvex. Indeed, the norm is a convex function, is affine and is polyconvex. Since by the observations from above , we obtain that . As for all we have , we also infer that
[TABLE]
As a consequence, for all we have
[TABLE]
which implies that for all . Thus,
[TABLE]
which together with symmetry yields \mathsf{F}^{T}\mathsf{F}=\left[\begin{array}[]{ ccc }1&0\\ 0&b\end{array}\right]. Finally, by the condition on the determinant of . ∎
Remark 8.3**.**
From the argument in the proof of Lemma 8.2 we actually have that
[TABLE]
where denotes the polyconvex hull of (see e.g., [Mül99]). As, in general, , where denotes the rank-one-convex hull of (see e.g., [Mül99]) we infer that, in the case where is given by (59),
[TABLE]
Finally, we prove that all gradient Young measures associated with the phase transformation (59) are (unique) simple laminates. In particular, no convex integration solutions exist for this phase transformation.
Proposition 8.4**.**
Let be open, bounded, Lipschitz. Let in with . Let denote the associated gradient Young measure and assume that
[TABLE]
where is as in (59). Then, there exists and such that
[TABLE]
This representation is unique.
In order to observe this, we follow the argument of Theorem 7.1. in [BJ92].
Proof.
By definition we have which in particular entails that . Further, by Lemma 8.1 there exists such that
[TABLE]
By the fact that the identity map is a Null-Lagrangian, we have , where . Denoting by the average integration in of , we obtain from Jensen’s inequality and the observation that for all
[TABLE]
Thus,
[TABLE]
which is equivalent to
[TABLE]
As a consequence,
[TABLE]
By (68) and by we obtain that for some . Therefore, only contains the elements and . In particular,
[TABLE]
where . Using that , we obtain that , and thus that the function only depends on . But since on this implies that . As a consequence, which concludes the argument. ∎
Appendix A Notation
In the convex integration algorithm described in Section 6, and in the constructions of Section 5 the notation may sometimes be complex and difficult to remember throughout the paper. For this reason, in this section we summarise the main quantities which come into play.
- •
is the distance between two sets (we remark that with slight abuse of notation this does not yield a metric);
- •
denotes the open ball centred at and of radius ;
- •
given denotes the Frobenius norm on matrices defined as ;
- •
denotes the Euclidean norm of a vector ;
- •
;
- •
is the two-well set defined in (9), set of our differential inclusion;
- •
is the quasiconvex hull of (see (20));
- •
is the set of Cauchy-Green tensors obtained by deformation gradients in ;
- •
is a sequence of sets in that forms an in-approximation for (see Definition 5.1);
- •
is a rhombus whose axes are of length rotated by a rotation . Thanks to Lemma 4.1, at every iteration of the convex integration algorithm we can replace the deformation gradient in rotated and rescaled versions of with a deformation gradient which is closer to (but not in) . depends on the new deformation gradient as well as the old boundary values;
- •
: Given a set , we denote by its subset, where, at a given iteration of the convex integration algorithm, has been replaced with a deformation gradient closer (see Lemma 5.2 and Lemma 5.3 for the precise notion of close) to ;
- •
: Given a set , is the subset of where, at a given iteration of the convex integration algorithm, the deformation gradient is replaced by a close deformation gradient (see Lemma 5.3 for details);
- •
denotes the seminorm of a function and is given by ;
- •
denotes the perimeter of a measurable set in . It is defined by where is the indicator function on the set . (see e.g., [EG15]). In our case, since we are mostly considering sets which are the finite union of triangles in , our notion will coincide with the classic notion of perimeter;
- •
is the set of all possible triangles (see Definition 5.1);
- •
is the subset of which are isosceles and whose height which is also a symmetry axis coincides with the longest axis of (see Definition 5.1);
- •
deformation gradient at the th iteration of the convex iteration algorithm;
- •
are indicator functions of the regions where is closer to and respectively (see Definition 6.2);
- •
is a collection of disjoint triangles covering, up to a null set, . We have that is equal to a constant on every (see Section 6);
- •
is the prototypical element of ;
- •
denotes the depth of the algorithm in . That is, the deformation gradient in a given region (see Section 6);
- •
is the set of all descendants of in the sense of Definition 6.6.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1[Bal 04] John M. Ball. Mathematical models of martensitic microstructure. Materials Science and Engineering: A , 378(1–2):61 – 69, 2004. European Symposium on Martensitic Transformation and Shape-Memory.
- 2[BJ 92] John M Ball and Richard D James. Proposed experimental tests of a theory of fine microstructure and the two-well problem. Phil. Trans. R. Soc. Lond. A , 338(1650):389–450, 1992.
- 3[CC 10] Milena Chermisi and Sergio Conti. Multiwell rigidity in nonlinear elasticity. SIAM Journal on Mathematical Analysis , 42(5):1986–2012, 2010.
- 4[CC 14] Allan Chan and Sergio Conti. Energy scaling and domain branching in solid-solid phase transitions. In Singular phenomena and scaling in mathematical models , pages 243–260. Springer, Cham, 2014.
- 5[CC 15] Allan Chan and Sergio Conti. Energy scaling and branched microstructures in a model for shape-memory alloys with S O ( 2 ) 𝑆 𝑂 2 SO(2) invariance. Mathematical Models and Methods in Applied Sciences , 25(06):1091–1124, 2015.
- 6[CDDD 03] Albert Cohen, Wolfgang Dahmen, Ingrid Daubechies, and Ronald De Vore. Harmonic analysis of the space BV. Revista Matematica Iberoamericana , 19(1):235–263, 2003.
- 7[CDPR + 19] Pierluigi Cesana, Francesco Della Porta, Angkana Rüland, Christian Zillinger, and Barbara Zwicknagl. Exact constructions in the (non-linear) planar theory of elasticity: From elastic crystals to nematic elastomers. ar Xiv preprint ar Xiv:1904.08820 , 2019.
- 8[CKZ 17] S Conti, M Klar, and B Zwicknagl. Piecewise affine stress-free martensitic inclusions in planar nonlinear elasticity. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences , 473(2203):20170235, 2017.