A Framework to Assess Value of Information in Future Vehicular Networks
Marco Giordani, Takamasa Higuchi, Andrea Zanella, Onur Altintas,, Michele Zorzi

TL;DR
This paper presents a framework using multicriteria decision processes to evaluate the value of information in future vehicular networks, addressing data prioritization challenges due to increasing sensor data volume.
Contribution
It introduces a novel framework for assessing VoI based on space, time, and quality, considering various factors affecting information value in vehicular communication.
Findings
Propagation scenario impacts VoI assessment accuracy
Sensor resolution and observation type influence VoI predictions
VoI varies with application-specific requirements
Abstract
Vehicles are becoming increasingly intelligent and connected, incorporating more and more sensors to support safer and more efficient driving. The large volume of data generated by such sensors, however, will likely saturate the capacity of vehicular communication technologies, making it challenging to guarantee the required quality of service. In this perspective, it is essential to assess the value of information (VoI) provided by each data source, to prioritize the transmissions that have the greatest importance for the target applications. In this paper, we propose and evaluate a framework that uses analytic hierarchy multicriteria decision processes to predict VoI based on space, time, and quality attributes. Our results shed light on the impact of the propagation scenario, the sensor resolution, the type of observation, and the communication distance on the value assessment…
Click any figure to enlarge with its caption.
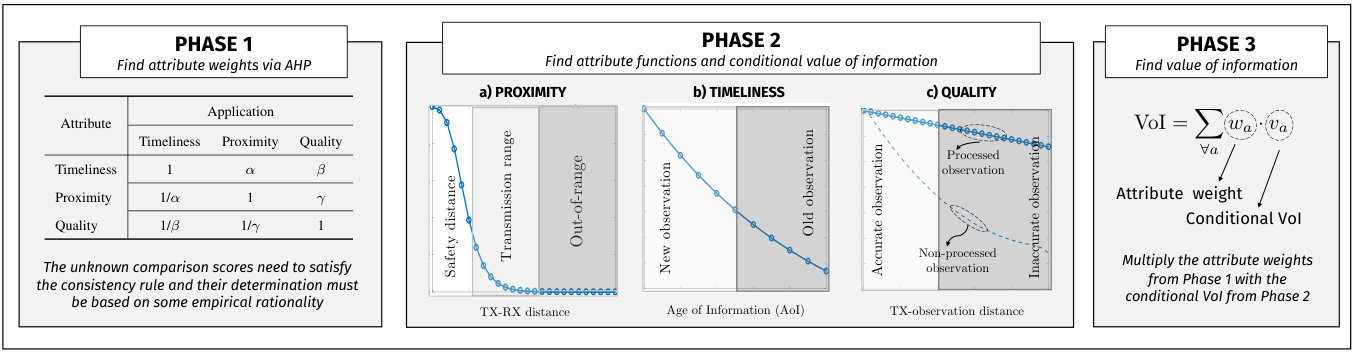 Figure 1
Figure 1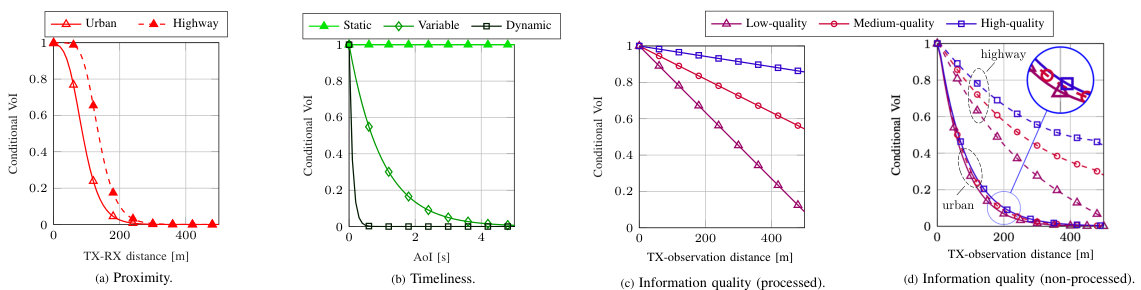 Figure 2
Figure 2| Parameter | Value |
| Sensor height | 1.2 m |
| Camera Field of view | 70 deg |
| TX/obs distance | |
| TX/RX distance | {1, …, 500} m |
| Age of information | {0, …, 5} s |
| Safety distance {urban, highway} | {24,72} m |
| Temporal decay {static, variable, dynamic} | {0,1,10} |
| Log. function params {A,K,C,Q,B,V} | {1, 0, 1, 1, 0.03, 0.2} |
| Camera resolution {low, medium, high} | {640, 1280, 4096} px |
| Attribute | Application: Safety | |||||
|
|
|
Weight | |||
| Timeliness | 1 | 1/7 | 1 | 0.1194 | ||
| Proximity | 7 | 1 | 5 | 0.7471 | ||
| Quality | 1 | 1/5 | 1 | 0.1336 | ||
| Attribute | Application: Safety | |||||
|
|
|
Weight | |||
| Timeliness | 1 | 1/7 | 1 | 0.1194 | ||
| Proximity | 7 | 1 | 5 | 0.7471 | ||
| Quality | 1 | 1/5 | 1 | 0.1336 | ||
| Attribute | Application: Traffic Management | |||||
|
|
|
Weight | |||
| Timeliness | 1 | 9 | 3 | 0.6554 | ||
| Proximity | 1/9 | 1 | 1/7 | 0.0549 | ||
| Quality | 1/3 | 7 | 1 | 0.2897 | ||
Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsAge of Information Optimization · Human Mobility and Location-Based Analysis · Distributed Sensor Networks and Detection Algorithms
A Framework to Assess Value of Information
in Future Vehicular Networks
Marco Giordani*∘, Takamasa Higuchi†, Andrea Zanella∘, Onur Altintas†, Michele Zorzi∘*
∘ Department of Information Engineering, University of Padova, Padova, Italy, e-mail: {giordani, zanella, zorzi}@dei.unipd.it
† TOYOTA InfoTechnology Center, USA, Inc., e-mail:{ta-higuchi,onur}@us.toyota-itc.com *†*The authors are currently with Toyota North America R&D, InfoTech Labs
(2019)
Abstract.
Vehicles are becoming increasingly intelligent and connected, incorporating more and more sensors to support safer and more efficient driving. The large volume of data generated by such sensors, however, will likely saturate the capacity of vehicular communication technologies, making it challenging to guarantee the required quality of service. In this perspective, it is essential to assess the value of information (VoI) provided by each data source, to prioritize the transmissions that have the greatest importance for the target applications. In this paper, we propose and evaluate a framework that uses analytic hierarchy multicriteria decision processes to predict VoI based on space, time, and quality attributes. Our results shed light on the impact of the propagation scenario, the sensor resolution, the type of observation, and the communication distance on the value assessment performance. In particular, we show that VoI evolves at different rates as a function of the target application’s characteristics.
Vehicular networking (V2X); value of information (VoI); analytic hierarchy process (AHP)
††copyright: acmcopyright††conference: 1st ACM MobiHoc Workshop on Technologies, mOdels, and Protocols for Cooperative Connected Cars ; July 2, 2019; Catania, Italy††price: 15.00††doi: 10.1145/3331054.3331551††isbn: 978-1-4503-6807-0/19/07††ccs: Computer systems organization Embedded systems††ccs: Computer systems organization Redundancy††ccs: Computer systems organization Robotics††ccs: Networks Network reliability
1. Introduction
The automotive industry is evolving towards Cooperative and Intelligent Transportation Systems (C-ITSs) to support advanced applications ranging from improved safety to infotainment (Shladover, 2018). Intelligent vehicles will be equipped with sophisticated sensors, including radars, cameras and LIDARs, whose data rate requirements (in the order of terabytes per driving hour (Lu et al., 2014)) may exceed the capabilities of existing vehicular communication technologies.
In this scenario, new communication radios operating in the millimeter wave (mmWave) bands above 30 GHz have been investigated because of the large bandwidth available at high frequencies (Choi et al., 2016; Giordani et al., 2017). Mobile edge computing (Mach and Becvar, 2017) and vehicle cloudification (Higuchi et al., 2017) have also emerged as promising solutions to meet strict delay requirements leveraging computation resources at the edge of the network and virtual cloud computing facilities formed by vehicles’ on-board computers, respectively.
In this context, it is fundamental to set a bound on the amount of information that is distributed over bandwidth-constrained communication channels. A traditional approach is to monitor the age of information (AoI) (Kaul et al., 2012), i.e., the obsolescence of the data, so that vehicles broadcast sensory messages that are not too old. However, the complex dynamics of vehicular networks affect the rate of decay of the information, making it difficult to set a fixed threshold for the AoI to discriminate between useful and obsolete pieces of data. Another approach is to discriminate the value of information (VoI) (Howard, 1966; Mason et al., 2019) in order to use the (limited) transmission resources in a way that maximizes the utility for the target applications.
The VoI theory has originally been applied to the military context to prioritize the information to be distributed to soldiers in a battlefield environment (Suri et al., 2015), although such strategies do not account for cases where the information sources are not directly under the users’ control. VoI has also been investigated in underwater systems (Boloni et al., 2013) and Internet of Things (IoT) applications (Bisdikian et al., 2013) to decide how much information to transmit through resource-constrained channels. However, while IoT sensors are mostly static and operate in steady conditions, connected cars are expected to move very rapidly, thereby posing new challenges for proper VoI characterization.
In this paper, we investigate for the first time the concept of VoI in vehicular networks. We therefore propose a method to assess VoI and rank scheduling options as a function of the characteristics of the network in which the nodes are deployed. Traditionally, VoI assessment strategies, even though not in the vehicular context, try to balance transmissions of non-critical information and timely dissemination of high-priority data. Some others, e.g. (Bengio et al., 2013), use machine learning to assign VoI based on the degree of correlation among the information sources, although operations are typically computationally heavy, and they can hardly be completed under low latency constraints. Adaptive approaches, e.g. (Kamar and Horvitz, 2013), use feedback to predict VoI, which however incurs non-negligible overhead and communication delays. Along these lines, a more natural (and practical) solution to assign VoI is to define automotive-specific criteria (i.e., attributes) which depend on the receiver’s context and application. Our innovative framework, in particular, exploits analytic hierarchy decision processes (AHP) to quantify the expected value of information based on time, space and quality interdependencies. We validate the technical accuracy of this approach in realistic scenarios and show how VoI evolves as a function of the scenario (i.e., urban or highway), the sensor resolution, the type of observation, the communication distance and the age of information. Thanks to its generality and computational simplicity, our method guarantees timely and efficient value assessment operations. Through our investigation, we also provide guidelines on the optimal network configurations and data scheduling alternatives that intelligently select information to be sent at each transmission opportunity while maximizing the utility to potential receivers.
2. VoI in Vehicular Networks
VoI is extremely context-dependent, i.e., different outcomes are possible depending on the characteristics (and requirements) of the application and the sources of information that are being considered.
Let denote the set of vehicles in the scenario which are equipped with on-board sensors (e.g., cameras) and a hardware unit enabling Vehicle-to-Vehicle (V2V) communications. At time , a vehicle perceives a road object through its on-board sensors, and generates a perception record , i.e., the vector of sensors’ measurements, for each of the detected objects. Our key research question in this work is whether vehicle should broadcast perception record to potential receivers. For example, may not be so valuable if destination nodes are not able to receive the perception message in a timely way. We assess that vehicles should distribute the information about each perceived observation only if its value is above a pre-defined threshold for at least one vehicle within the communication range. Such a threshold, in turn, may depend on the target application.
In this paper, we focus on two broad application domains that, for their generality and complementarity, we believe are good representatives of future vehicular services.
- •
Advanced Safety: It enables semi- or fully-automated driving through dissemination of sensor data, thereby promoting safer traveling and collision avoidance. These applications are typically characterized by strict latency requirements to guarantee real-time operations.
- •
Traffic Management: It enables traffic control and coordination through the creation of a Local Dynamic Map (LDM) (Eiter et al., 2019), which integrates sensor data streamed by vehicles in a geographical area. These operations may require relatively high data rate compared to safety applications, while some latency can be tolerated (depending on the degree of automation).
In the following, we discuss the information sources and the attribute categories that affect VoI.
2.1. Information Sources
As C-ITSs evolve towards the support of safety-critical applications, it is fundamental to implement network architectures that guarantee timely and accurate positioning of vehicles. Positioning is typically provided by the Global Positioning System (GPS) (which also guarantees accurate time synchronization among vehicles), although other localization techniques, e.g., based on image processing, can be useful to improve accuracy. In this paper, we consider camera sensors as the principal information source to enable position estimation. The accuracy of the camera observations depends on (i) the resolution of the sensor, which is a measure of the image width/height and the frame rate, (ii) the field of view, and (iii) the operating distance.
2.2. Vehicular Attributes
VoI typically decays over time at a rate that is application dependent. Value determination should indeed account for specific attributes, e.g., timeliness, spatial proximity and quality, as defined next.
- •
Timeliness: VoI decreases with the relative age of information, i.e., the time between the generation and reception of the information, normalized to its lifetime, i.e., the temporal horizon over which that piece of information is considered valuable.
- •
Proximity: VoI is a function of (i) the distance between the information source and destination, i.e., sensory data generated by close-by vehicles are generally more valuable than data coming from farther nodes, and (ii) the scenario, i.e., urban/highway.
- •
Information Quality: VoI depends on (i) the intrinsic quality of the information source, which may be assessed in terms of sensor resolution, and (ii) the distance between the source sensor and the observation (e.g., the depth measurement error increases proportionally with the distance).
In general, VoI can be also affected by network parameters. We do not preclude in the future to further extend the list of attributes included in this paragraph with other factors including, e.g., the vehicle density, the role of a vehicle in the network (e.g., platoon head, cluster coordinator, etc.), and the road topology.
3. VoI Assessment Framework
In this paper, we consider two possible embodiments of VoI assessment: processed and non-processed approaches. The trade off involves latency, energy consumption and VoI accuracy. In the first case, the perception record is analyzed by the sender to extract context information (e.g., estimated positions of objects in a captured image) before being broadcast. While incurring some processing delays, this allows the sender to validate the integrity of the observation and determine whether it embeds valuable characteristics for the potential receiver(s). In the second case, the perception record is broadcast immediately after it is generated, thereby yielding a more responsive value assessment operation. The sender, however, needs to predict probabilistically the value of the observation to prevent circulation of duplicate or redundant data.
The proposed framework performs VoI assessment operations through three main phases, as illustrated in Fig. 1 and described next.
Phase 1: Attribute Priority Weights (via AHP)
First, the algorithm applies the Analytic Hierarchy Process (AHP) to derive the relative degree of priority among the vehicular attributes, i.e., timeliness, proximity and quality, by populating a pairwise comparison matrix (as illustrated in the left frame of Fig. 1) with comparison scores (i.e., , , ) (Mu and Pereyra-Rojas, 2018). The comparison scores in (ranging from 1/9 to 9) are assigned according to the Saaty comparison scale (Saaty, 1990) and assess the importance of the attributes in the row relative to those in the column (e.g., the score 3 is assigned if the item on the row is “moderately more important” than the item on the column in the specified application domain). Note that is reciprocal by construction, i.e., , , where is the size of , i.e., the number of attributes.
As soon as the comparison scores have been determined, priority weights , , are computed evaluating the normalized principal eigenvector of , i.e., the eigenvector that corresponds to the eigenvalue with the largest magnitude:
[TABLE]
The priority weights indicate how valuable each attribute is compared to the others. It appears clear that the AHP method determines relative (instead of absolute) priority weights, which are based on empirical evaluation criteria, and consequently have a certain degree of arbitrariness. According to the AHP, in order for the weight vector to be a good representative of the relative importance of the attributes, the matrix should be consistent, i.e., such that , . However, given the arbitrariness in the attribute selection, the matrix is usually not consistent. A measure of the matrix consistency is given in (Mu and Pereyra-Rojas, 2018) in terms of the so-called consistency index . Based on (Mu and Pereyra-Rojas, 2018), the weight vector can be considered acceptable if satisfies the following consistency rule:
[TABLE]
where is the average of the s obtained by randomly generating reciprocal matrices of size (for , we get ).
Phase 2: Conditional VoI
The framework is now used to assess how VoI evolves, conditioned to each attribute. Considering the attributes presented in Sec. 2.2, different VoI functions are defined.
a) Proximity: For the proximity attribute, we propose to use a logistic function to model VoI dependency on the distance (in meters) between the information source and the destination, as represented in the first box of the middle frame of Fig. 1. The logistic function is always monotonically decreasing in , but tuning the function’s parameters it is possible to move from a smooth and quasi-linear decrease of VoI with to a step-like behavior, where VoI is almost constant within a certain range from the source and suddenly drops to zero beyond that range. The function is given by:
[TABLE]
Parameters in Eq. (3) are selected so that as and as , i.e., beyond the communication range, and their values will be detailed in Table 1. In particular, is the safety distance (in meters) and determines the threshold beyond which starts decreasing. is therefore a function of the scenario, i.e., urban/highway, in which the vehicles are deployed.
b) Timeliness: For the timeliness attribute, we propose to use an exponential function (Boloni et al., 2013), as represented in the second box of the middle frame of Fig. 1, i.e.,
[TABLE]
where represents the AoI (in seconds), and is the temporal decay parameter. In particular, indicates that the information is not delay sensitive, while a large models a quick obsolescence of the information.
c) Quality: We propose that VoI for the quality attribute evolves as a function of the distance (in meters) between the source sensor and the perceived observation, as represented in the third box of the middle frame of Fig. 1. We distinguish between processed () and non-processed () VoI assessment operations. In the processed case, VoI depends only on the characteristics of the sensor (Stein et al., 2003). With reference to the camera sensor, we get
[TABLE]
where is the height of the sensor, and is the focal distance. In particular, depends on the camera image resolution in the horizontal domain () and the field of view () in degrees, so that
[TABLE]
In the non-processed case, the sender does not know the content of the perception record, therefore it has to identify a method to probabilistically predict whether such record embeds valuable information. We assume that a certain observation (e.g., object) can be detected if it is in Line of Sight (LOS) with respect to the sensor’s field of view. The LOS probability is a function of and the propagation scenario, and is modeled as in (3GPP, 2019):
[TABLE]
The conditional VoI is finally computed as
[TABLE]
Phase 3: Overall VoI
Finally, the framework assigns the value of information by multiplying the attribute weights , , from Phase 1 with the conditional VoI , , from Phase 2:
[TABLE]
A data scheduler finally sorts the information products in descending order of values and sequentially forwards them to the surrounding receivers. The scheduler may also cancel transmissions of information whose value is below a pre-defined threshold .
4. Framework Validation and Results
In this section we validate the technical soundness of our proposed framework in target use cases. Our results can be used as a basis for evaluating the optimal data scheduling strategy that maximizes the utility of the transmitted information for the final receiver(s).
The system parameters are based on realistic design considerations and are summarized in Table 1. For the proximity attribute, we calculate the safety distance between vehicles as (New York State Department of Motor Vehicles, 2011), where is the speed limit, which we set to 12 m/s and 36 m/s in urban and highway scenarios, respectively. We also let the distance between the sender and the receiver vary from 1 to 500 m. For the timeliness attribute, we consider static (e.g., fixed road construction), variable (e.g., temporary social/political events), and dynamic (e.g., pedestrian crossing the street) observations, which correspond to , respectively. We let the AoI parameter vary from 0 to 5 s. For the quality attribute, we consider low-, medium- and high-quality sensors, which are modeled as , , and pixel cameras, respectively. The sensor is placed at a distance m from the road surface, and the field of view is set to degrees. We also assume that the target observation is placed at distance from the camera sensor. We recall that, in order to exemplify the approach, in this work we focus on the evaluation of VoI for the position data provided by cameras.
Phase 1 results – attribute weights. In Table 2 we report the pairwise comparison matrices which assess the interdependencies among the considered VoI attributes.111Notice that the comparative scores we consider in Table 2 are chosen in such a way that the consistency rule defined in Eq. (2) is satisfied. Other combinations of scores can be also considered, as long as they are selected in a way that guarantees that the assigned attribute interdependencies are fully representative of the characteristics of the application under consideration. For instance, for safety applications, we chose to set the proximity vs. timeliness score to since we deem extremely important for vehicles to monitor space while broadcasting context information (e.g., vehicles need to know when the neighbors’ distance falls below the safety-critical threshold to trigger collision avoidance transmissions and, at the same time, should defer or cancel transmissions relative to spatially far vehicles). For traffic management applications, we decided to set the proximity vs. timeliness score to since the broadcasting decision does not have to be space-dependent (i.e., LDM updates should be addressed to both spatially close and far neighbors). Attribute weights are determined from Eq. (1) and demonstrate that the dissemination of space-related information is very valuable to safety services () while, for traffic management services, time-related information should be preferred ().
Phase 2 results – conditional VoI. In Fig. 2a we plot the conditional VoI for the proximity attribute as defined by the logistic function in Eq. (3). We can see that the value of position information is generally higher for a highway scenario than for an urban one. This is consistent with the fact that the larger safety distance between vehicles in highway scenarios requires the information to be disseminated over longer ranges, in order to reach the nearby vehicles. Furthermore, the highway scenario is usually characterized by better propagation conditions that increase the probability of successful reception at long distances and, consequently, the value of the packet transmission itself. Accordingly, VoI drops to zero beyond 300 m, which thus represents a suitable communication range for vehicular networks. In Fig. 2b we plot the conditional VoI for the timeliness attribute as follows from the exponential function in Eq. (4), which is proportional to the AoI and the temporal characteristics of the perceived object, as defined in Sec. 2. In particular, the value is constant in case of static observations while, for dynamic observations, it decreases at a pace that is a function of .
In Fig. 2c and Fig. 2d we plot the conditional VoI for the quality attribute, considering both processed and non-processed value assessment strategies, respectively. In the non-processed case the conditional VoI exhibits a significant difference between urban and highway scenarios. This gap is due to the higher probability that the line of sight is blocked in urban scenarios, in which case the image captured by the camera would be basically useless.
Phase 3 results – overall VoI. Our goal is to assign a value to different sources of information (in this work we consider camera observations) in such a way that the utility to potential receiver(s) is maximized. In Fig. 3 we evaluate the impact of the propagation scenario on VoI. First, we observe that, for safety applications, the value of data transmission at short distances is high in all considered conditions, reflecting the importance of maintaining fresh and updated information among close-by vehicles. Second, we see that, for traffic management services, VoI is almost independent of the TX/RX distance (proximity weight ), demonstrating the importance of sharing LDM updates even at large distances. Third, we notice that, for safety services, VoI drops for values of larger than 100 m, which is a rather safe inter-vehicle distance (in particular, in urban scenarios): transmitting data beyond this range would just increase the channel access contention without bringing much benefit in terms of safety. We can also observe that, in general, VoI for the considered information is higher in highway than in urban scenarios, because of the higher probability of LOS between object and sensor (camera). In general, the non-processed case (Fig. 3b), although guaranteeing real-time value determination, represents a lower bound for VoI in vehicular networks, as it provides a probabilistic, rather than deterministic, method to assess VoI. Moreover, for the non-processed case, different characterizations of the quality attribute in urban and highway scenarios (see Fig. 2d) result in different overall VoI: for traffic management applications, the gap is as large as 25% when m, i.e., when the endpoints are in NLOS.
The following results are derived considering processed VoI assessment operations. In Fig. 4 we investigate how VoI evolves as a function of the type of observation. We observe that dynamic information is likely to have value for safety applications (although VoI eventually drops to zero at large distance): the gap between static and dynamic, i.e., short-lived, observations is less than 10% for m. Conversely, the large impact of the timeliness attribute in traffic management operations (the weight is 0.6554) makes VoI decrease as much as 65% considering dynamic (as opposed to static) observations. This makes sense as time-varying perception records might become obsolete by the time they are actually transmitted.
In Fig. 5 we plot VoI as a function of the AoI and the sensor reading’s temporal characteristics. Ideally, we would like information to be received as timely as possible, i.e., at the same instant it was generated by the source. However, real-world constraints, first and foremost the restricted network capacity, put a limit on the frequency at which status updates can be broadcast, thereby making the AoI larger than the inter-transmission time. For safety services, both “new” (i.e., AoI ms) and “old” (i.e., AoI ms) information provide comparable value to the receiver(s), as long as short-range communications are considered. The reason is that even old perception records may still potentially increase the opportunity for vehicles to make object detections, a critical pre-requisite for safety-related operations. For traffic management services, instead, the impact of the AoI is very strong. “Old” information (i.e., AoI ms) may, in fact, decrease VoI by more than 70% considering dynamic observations (Fig. 5(b)). To avoid the decay of information, such systems require very frequent updates to be disseminated through inter-vehicular communications, possibly causing, however, channel access problems. We notice that, for the dynamic case, VoI considering traffic management applications is below 0.6 even at short distances: at m, VoI vs. VoI for safety applications, thereby validating the results in Fig. 4.
The patterns we observed in the previous plots can be recognized also in Fig. 6, which illustrates VoI evolution for different types of sensors. We see that VoI increases proportionally to the camera resolution, even though the effect of the sensor quality is not very significant: the gap between high- and low-quality sensor readings is below 15%. This is consistent with the outcomes of the AHP comparative evaluations, which assign very low priority weight to the quality attribute. In fact, although the network requires context information to be reliable, it still needs to prioritize timely dissemination to spatially close neighbors to prevent communication failures. Nevertheless, we observe that sensor quality degradation has a bigger impact on traffic management than on safety services (i.e., vs. , respectively). Finally, Fig. 6 acknowledges the higher VoI for safety operations compared to traffic management at short distance.
5. Conclusions and Open Challenges
Despite the consensus about using VoI-aware solutions to reduce link overload, how to actually realize this is still a largely unexplored issue. In this paper we investigated for the first time the concept of VoI in vehicular networks and proposed a method that quantifies the expected VoI based on time, space and quality interdependencies. We evaluated the impact of the operating distance, the type of observation, the type of sensor, the propagation scenario and the age of information on the value assessment. Moreover, we numerically showed the rate at which VoI decreases considering obsolete, time-varying and inaccurate observations.
In this work we demonstrated the feasibility of considering VoI as a proxy for broadcasting decisions in vehicular networks. As part of our future research, we will validate our framework in dynamic scenarios and investigate the impact of other types of object features (e.g., the road structure) on the end-to-end network performance. Moreover, we will extend our implementation considering feedback messages from the receiver(s) and learning strategies.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1(1)
- 23GPP (2019) 3GPP. 2019. Study on evaluation methodology of new Vehicle-to-Everything V 2X use cases for LTE and NR (Release 15). TR 37.885 (2019).
- 3Bengio et al . (2013) Yoshua Bengio, Aaron Courville, and Pascal Vincent. 2013. Representation learning: A review and new perspectives. IEEE Transactions on Pattern Analysis and Machine Intelligence 35, 8 (Mar. 2013), 1798–1828.
- 4Bisdikian et al . (2013) C. Bisdikian, L. Kaplan, and M. Srivastava. 2013. On the quality and value of information in sensor networks. ACM Transactions on Sensor Networks (TOSN) 9, 4 (Jul. 2013), 48.
- 5Boloni et al . (2013) Ladislau Boloni, Damla Turgut, Stefano Basagni, and Chiara Petrioli. 2013. Scheduling data transmissions of underwater sensor nodes for maximizing value of information. In IEEE Global Communications Conference (GLOBECOM) . 438–443.
- 6Choi et al . (2016) J. Choi, V. Va, N. Gonzalez-Prelcic, R. Daniels, C. R. Bhat, and R. W. Heath. 2016. Millimeter-Wave Vehicular Communication to Support Massive Automotive Sensing. IEEE Communications Magazine 54, 12 (December 2016), 160–167.
- 7Eiter et al . (2019) T. Eiter, H. Füreder, F. Kasslatter, J. X. Parreira, and P. Schneider. 2019. Towards a Semantically Enriched Local Dynamic Map. International Journal of Intelligent Transportation Systems Research 17, 1 (01 Jan 2019), 32–48.
- 8Giordani et al . (2017) M. Giordani, A. Zanella, and M. Zorzi. 2017. Millimeter wave communication in vehicular networks: Challenges and opportunities. In 6th International Conference on Modern Circuits and Systems Technologies (MOCAST) .