Stationary points at infinity for analytic combinatorics
Yuliy Baryshnikov, Stephen Melczer, Robin Pemantle

TL;DR
This paper develops conditions to ignore complex behavior at infinity in algebraic varieties, enabling the application of Morse theory to analyze topological invariants in analytic combinatorics more effectively.
Contribution
It establishes checkable conditions for when behavior at infinity can be disregarded, simplifying Morse theory applications in analytic combinatorics in several variables.
Findings
Conditions for ignoring behavior at infinity are established.
Simplified Morse theory arguments are enabled for complex algebraic varieties.
New methods are developed for problems previously inaccessible.
Abstract
On complex algebraic varieties, height functions arising in combinatorial applications fail to be proper. This complicates the description and computation via Morse theory of key topological invariants. Here we establish checkable conditions under which the behavior at infinity may be ignored, and the usual theorems of classical and stratified Morse theory may be applied. This allows for simplified arguments in the field of analytic combinatorics in several variables, and forms the basis for new methods applying to problems beyond the reach of previous techniques.
Click any figure to enlarge with its caption.
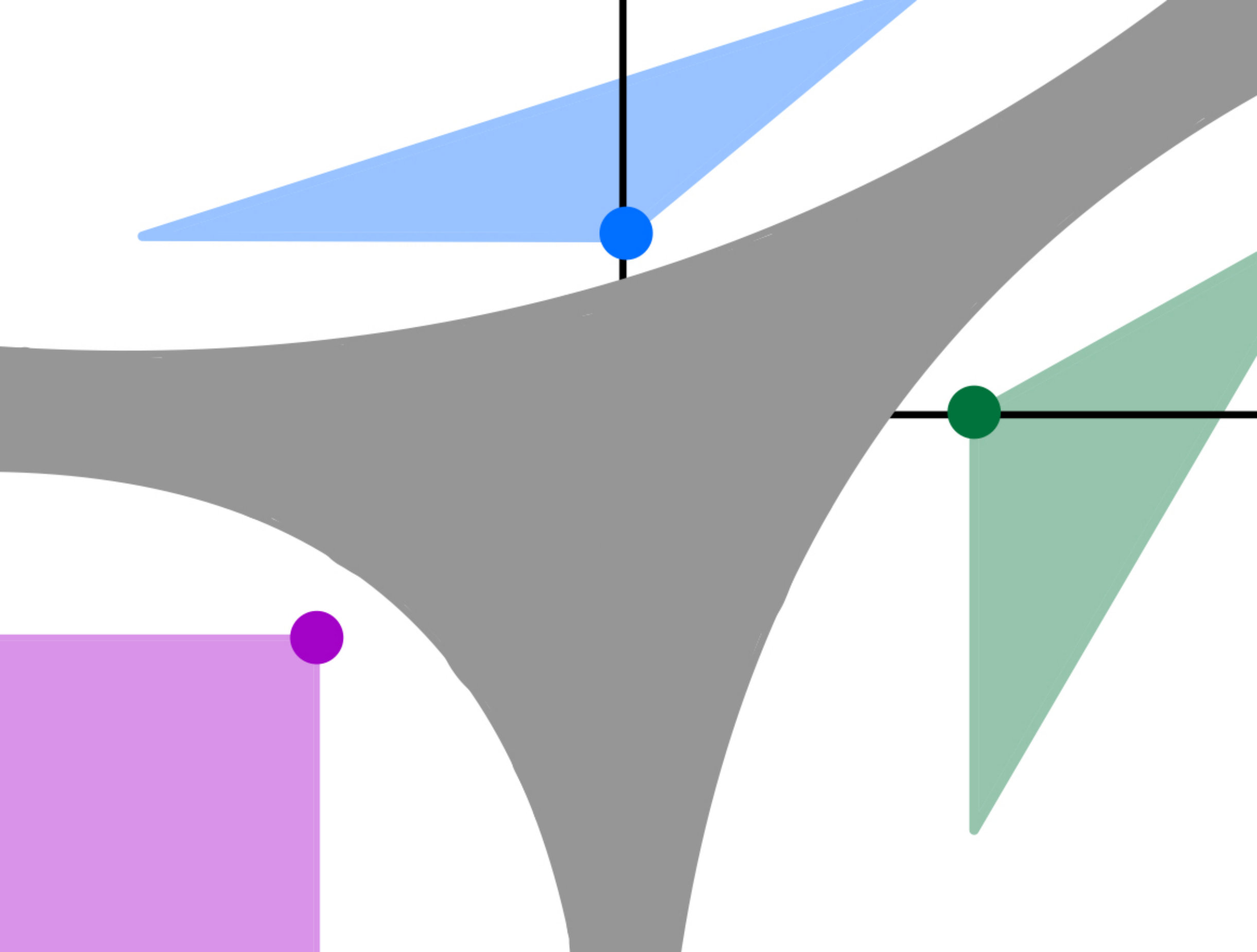 Figure 1
Figure 1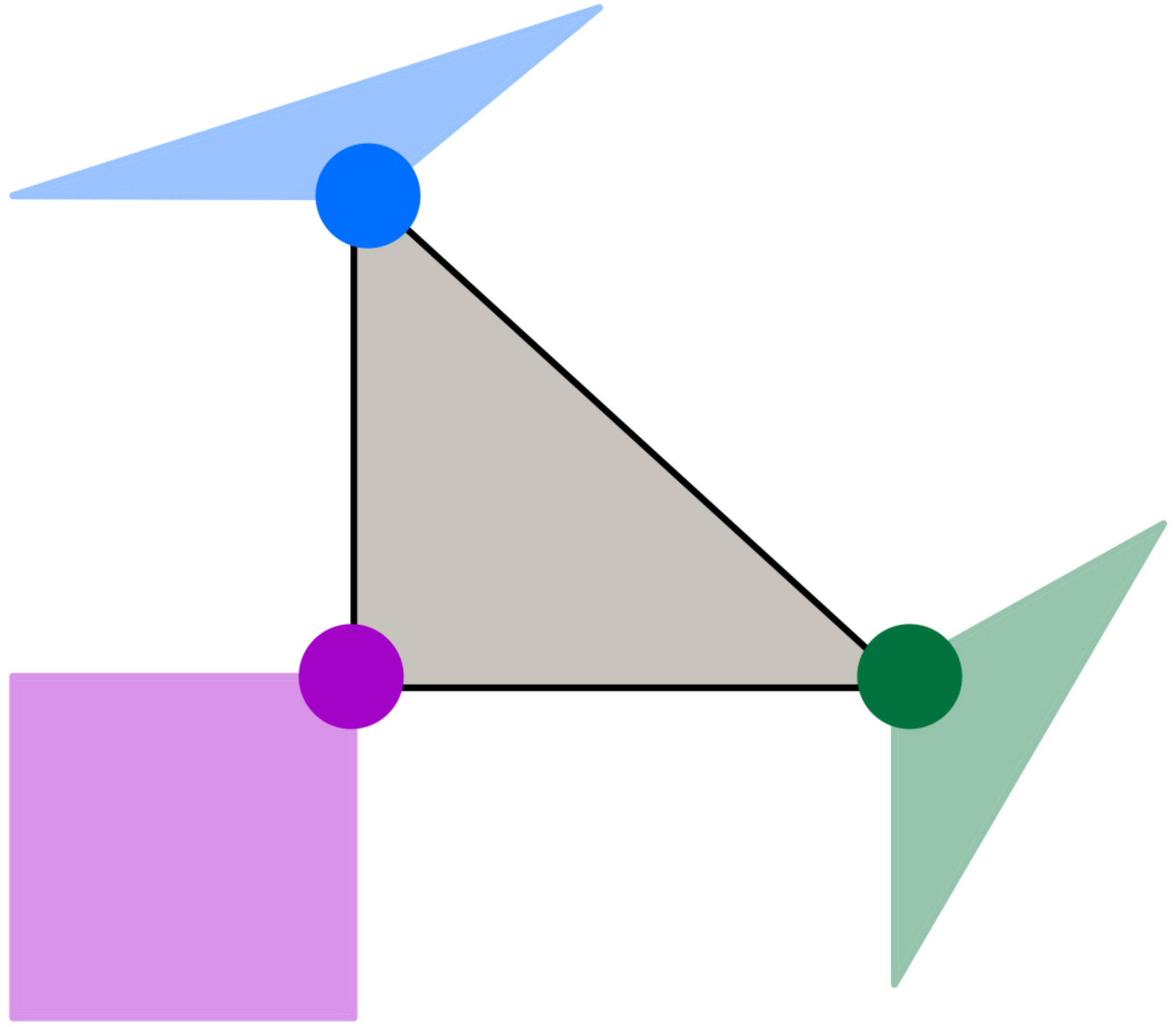 Figure 2
Figure 2Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Stationary points at infinity for analytic combinatorics
Abstract: On complex algebraic varieties, height functions arising in combinatorial applications fail to be proper. This complicates the description and computation via Morse theory of key topological invariants. Here we establish checkable conditions under which the behavior at infinity may be ignored, and the usual theorems of classical and stratified Morse theory may be applied. This allows for simplified arguments in the field of analytic combinatorics in several variables, and forms the basis for new methods applying to problems beyond the reach of previous techniques.
Yuliy Baryshnikov, University of Illinois, Department of Mathematics, 273 Altgeld Hall 1409 W. Green Street (MC-382), Urbana, IL 61801, [email protected], partially supported by NSF grant DMS-1622370.
Stephen Melczer, Department of Combinatorics & Optimization, University of Waterloo, 200 University Avenue West, Waterloo, ON N2L 3G1, Canada, [email protected], partially supported by an NSERC postdoctoral fellowship.
Robin Pemantle, University of Pennsylvania, Department of Mathematics, 209 South 33rd Street, Philadelphia, PA 19104, [email protected], partially supported by NSF grant DMS-1612674.
Subject classification: 05A16, 32Q55; secondary 14F45, 57Q99.
Keywords: Analytic combinatorics, stratified Morse theory, computer algebra, critical point, intersection cycle, ACSV.
1 Introduction
1.1 Motivation from Analytic Combinatorics
Analytic combinatorics in several variables (ACSV) studies coefficients of multivariate generating functions via analytic methods; see, for example, [PW13]. The most developed part of the theory is the asymptotic determination of coefficients of multivariate series where the coefficients are defined by a multivariate Cauchy integral
[TABLE]
for an appropriate torus of integration . In many applications, is rational function with a power series expansion whose coefficients are indexed by , an integer vector. More generally, one often looks for formulas valid as varies over some cone.
Let denote the norm and let denote the scaled vector . As a slight abuse of notation, we will sometimes consider to be an element of rather than the unit ball, when the implicit identification of leads to no ambiguity.
Given any we define the phase function, or height function, depending only on , by
[TABLE]
where the logarithm is taken coordinate-wise and denotes the real part of complex . The height function is useful because it captures the behaviour of the term in the Cauchy integral that grows with . Note that even though the ratio is always rational, a sequence of such direction vectors may converge to any real and our results often hold uniformly for in cones of . We will be clear when results do not require to be rational.
Typically, the Cauchy integral (1.1) is evaluated by applying the stationary phase (saddle point) method after a series of deformations of the chain of integration. To elaborate, we let denote the pole variety of rational , with and coprime, let denote the nonzero complex numbers, and let denote the domain of holomorphy of the Cauchy integrand in (1.1). The Cauchy integral depends only on the homology class111Throughout, we assume integer coefficients for all homology groups. of in . Stratified Morse theory for complements of closed, Whitney stratified spaces suggests that any cycle can be deformed downward (in the sense of decreasing ) until it reaches a topological obstacle at some (stratified) critical point of . A topological obstacle generally implies that a stationary phase contour has been reached. This leads to the following outline for the asymptotic evaluation of coefficients .
- (I)
Find a basis of the singular homology group with integer coefficients , consisting of attachment chains localized near the near critical points of on the Whitney stratified space , in the sense that each chain intersected with the set of points is contained in a ball around of radius shrinking with . 2. (II)
Compute the coefficients of in this basis; that is, write
[TABLE]
for some integers . 3. (III)
Asymptotically compute the Cauchy integral over each chain of integration .
This paper concerns pre-conditions for the validity of this program. In reverse order, we discuss parts of the program carried out elsewhere.
Part III of the program varies in difficulty depending on the nature of the critical point. When the point is in a stratum of positive dimension where has at worst normal intersections, it is at worst a multivariate residue together with a saddle point integral, the integral being somewhat more tricky if the saddle point is not quadratically nondegenerate. This follows from [Var77] or [Vas77] and is stated explicitly in [PW04] and [PW13, Chapter 10]. The more difficult case is when the critical point is an isolated singularity of the stratified space . Homogenizing at , one reduces to the problem of computing the inverse Fourier transform of a homogeneous hyperbolic function, some instructions for which can be found in [ABG70]. This is carried out in [BP11] for two classes of quadratic singularities, and in [BMP19] for some singularities of lacuna type. For non-isolated singularities, or isolated singularities of higher degree, the technology is still somewhat ad hoc.
Step II is a topological computation. In a slightly different context, Malgrange [Mal80] noted the lack of techniques for approaching a similar problem. Effective algorithms exist only in special cases, such as the bivariate case [DvdHP12]. A new computational approach, relying on the results of the present article together with techniques from computer algebra, is discussed in [BMP19] and below.
Step I may fail entirely. It is not always true that such a basis exists (see Examples 2 and 4 below), due to the existence of a topological obstruction at infinity222Here and throughout, “infinity” refers not only to projective points but to points where at least one coordinate vanishes; these are the cases in which the height function may not be well defined. Affine points with coordinates equal to zero may arise as critical points for Laurent series.. The focus of the present paper is to find checkable conditions under which the class is indeed representable in the form (1.3). This has been a sticking point up to now in the development of ACSV methods.
1.2 Previous work
Although the methods of ACSV parallel well-established mathematical techniques, the underlying combinatorics often results in constraints which are natural in our context but not covered by existing theory. In this section we discuss related previous work and why the results we need do not follow from it.
To begin, there are several reasons why stratified Morse theory does not immediately imply the existence of the type of basis appearing in Step I. If were a Morse function (in the stratified sense) then Theorems A and B of [GM88] would in fact imply that such a basis exists with some number of generators associated with each critical point . These are given by the rank of a relative homology group of the normal link at of the stratum containing (in the dimension equal to the codimension of the stratum). If fails to be Morse by behaving degenerately at such a basis still exists, though it might take a messy perturbation argument to compute the rank at and give cycle representatives for a basis.
A more serious problem for us is that is not a proper function on . This means that gradient flows of the Cauchy domain of integration may reach infinity or the coordinate planes at some finite height , and hence that contours may not be deformable to levels below because they get sucked out to infinity first. As shown in the examples in Section 4, this can indeed happen.
A somewhat generic cure for this is to compactify. In the appendix, we outline how to embed in a compactification to which the phase function and its gradient extend continuously. Applying the results of stratified Morse theory to then decomposes the topology of into attachments at critical points of . Generically, there will be finitely many critical points of , all lying in . When this occurs, is said to have no stationary points at infinity and the decomposition in Step I follows. Two weaknesses of this approach are the difficulty in computing (it relies on an unspecified resolution of singularities) and the fact that depends on not continuously but rather through the arithmetic properties of the rational vector , thus failing to deliver asymptotics uniform in a region.
1.2.1 Related notions of singularities at infinity
We now review three streams of prior work where, under some hypotheses of avoidance of critical points at infinity, the topology of a space is shown to decompose similarly to the desired decomposition in Step I.
One setting where such problems have been investigated concerns the Fourier transform of where is a real polynomial. When is homogeneous, resolution of singularities puts the phase into a monomial form, after which leading term asymptotics can be read from its Newton diagram [Vas77, Var77]. For general polynomials, critical points of occur at places other than the origin and these local integrals must be pieced together according to some global topological computation333Pham attributes this idea to Malgrange, “The reduction of a global Fourier-like integral to a sum of Laplace-like integrals is the topic of Malgrange’s recent paper, motivated by an idea of Balian-Parisi-Voros.” [Pha83].. A key difference from our case is that this is an integral over all of (there is no polar set). Morse theory enters the picture via the filtration , which dictates how the contour of integration may be deformed, where denotes the imaginary part of .
Many similarities between this case and ours are evident. The height function plays a similar role to our height function . One may apply methods of saddle point integration at the critical points of , as done by Fedoryuk [Fed77] and Malgrange [Mal74, Mal80]. Fedoryuk computes in relative homology, which is good enough for the estimation of integrals. Pham [Pha83] uses an absolute homology theory over a family of supports, enabling more precise asymptotic results. Pham’s crucial hypothesis H1 is that there are no bifurcation points of the second type or “critical points at infinity”. The conclusion is the existence of a basis for the homology of with downward supports consisting of so-called Lefschetz thimbles, along with a dual basis (in the sense of intersections) allowing one to compute the coefficients of an arbitrary cycle in this basis. Unfortunately, we can see no direct connection that would reduce our computation to the type analyzed by Pham and others before him. Even if we could, the issue of spurious critical points at infinity would still need to be addressed. As pointed out in [Pha83, page 330], there is no simple way of telling which of these is relevant.
A second stream of work concerns the topology of complex polynomial hypersurfaces. Here there are no integrals, hence no phase functions per se, although motivation from [Mal80] and [Pha83] is cited in the introduction of [Bro88]. In this paper, Broughton computes the homotopy type of a generic level set , showing it to be a bouquet of spheres, where is obtained by summing the Milnor numbers at the critical points of other than those with critical value . Examples show that a hypothesis is necessary to rule out “critical points at infinity”; see also [Par95]. Both of these works refer to an assumption of only isolated critical points at infinity or none at all, but do not supply a specific definition of critical points at infinity. Such a definition is supplied in [ST95]. They compactify by taking the closure of its graph in projective space and taking a Whitney stratification of the resulting relation. Depending on whether there are no critical points at infinity, void (hence ignorable) critical points at infinity, isolated non-void critical points at infinity, or non-isolated points, various conclusions can be drawn about the topologies of the fibers . Again, no direct relation allows us to derive from this the decomposition in Steps I and II, and even then, the issue of spurious critical points would remain.
A third stream of work concerning critical values at infinity comes closest to our aims here. The focus of this stream of work is, given a smooth map on some sort of space, to find a set that is not too big, such that outside of , the mapping is a locally trivial fibration. For proper maps one has the Thom isotopy lemma, which states that can be taken as the set of critical values, namely the set where is not a submersion at , failing to map the tangent space surjectively. To extend the isotopy lemma to nonproper maps, one needs to add to an apprpriately defined set of critical values at infinity. When is smooth the so-called Palais-Smale Condition, and Rabier’s general notion of asymptotic critical value [Rab97, Section 6], yields such an isotopy result, valid in a quite general infinite dimensional setting. Further work has shown that under reasonable hypotheses the set of critical values is not too big, for example it has measure zero [KOS00].
Our work requires a result along similar lines, but for stratified spaces. More specifically, in the proof of Theorem 2.7 below, we use an isotopy result away from a small computable set of stratified critical values for the height function to describe in terms of stationary phase contours. A similar project is undertaken in the contemporaneous work [DJ21]. There, Dinh and Jelonek prove a version of the (stratified) Thom isotopy lemma away from a computable and nowhere dense set of affine and at-infinity critical values. In comparison to our work, Dinh and Jelonek work in a more general setting but thus use more complicated constructions leading to a less practical algorithm for detecting critical points at infinity. We thus do not use their stratified non-proper isotopy lemma [DJ21, Theorem 3.4, Section 3]; rather, we use a similar but streamlined approach to prove exactly what is needed for the topological decomposition in the first part of our main results. A robust study of these topics from the point of view of efficient algorithms is a promising direction for future work in the computer algebra community.
1.3 Present work
We define a set of projective points which we call stationary points at infinity (SPAI). These are limits at infinity (or the coordinate planes) of sequences of points that are asymptotically converging to criticality for a given height function . The ultimate goal is to find such sequences on which remains bounded, because these indicate trajectories in which gradient like Morse deformations may get pulled out to infinity. Such sequences, together with limit points of the height function, are called heighted SPAI (H-SPAI). Their image under coincides with the set of asymptotic critical values in, e.g., [Rab97, DJ21]. Note that we use the term stationary point instead of the term critical point (common in the analytic combinatorics literature) as ‘critical point ’ is overloaded and potentially misleading to readers in some areas of mathematics.
The advantage to working with SPAI is that these are easily computed for any real or when is a symbolic parameter. While spurious SPAI do arise (see Examples 3 and 7), all such examples we know of can be ruled out by determining the height function to be unbounded (that is, we do not need to compute the limit set of heights, just to check whether it is empty). As to whether H-SPAI themselves can be spurious, as noted in the introduction of [DJ21], characterization of bifurcation values (where local triviality fails) is open, and in particular these can be a proper subset of critical values. However, in applications to ACSV, in all examples we know of when there are H-SPAI, the attachment cycles do not in fact form a basis of the relevant homology group, therefore the isotopy arguments must fail.
Methodologically, it should be noted that we do not try to show topological trivality at infinity in the absence of SPAI, only that the necessary deformations can avoid infinity. This, we suspect, is why our Section 5 is shorter than [DJ21, Section 3].
Our main results are the following.
- (i)
Given a direction and real , we define three sets . 2. (ii)
We give an algorithm for computing SPAI. 3. (iii)
Theorem 2.7, which states that cycles may be pushed down until a stationary value is reached in such a way that they remain above the stationary height only in an arbitrarily small neighborhood of the stationary point(s).
As a consequence, when SPAI is empty (which is easily computed) or when H-SPAI is empty (which may be computed more easily than whether is empty), any cycle may be decomposed into attachment cycles. We also note that for a generic the set SPAI is indeed empty, and that computability of SPAI for symbolic means we can compute a polynomial criterion for the set of directions in which SPAI is nonempty.
The main value of our work lies in its application to ACSV which, in turn, derives its value from combinatorial applications. The next subsection reviews several combinatorial paradigms in which ACSV yields strong results; a different class of examples is presented in Section 4 below. The purpose of those later examples is to show how Theorem 2.7 can considerably strengthen ACSV analysis, and to illuminate the role of the hypotheses in the main results and the increased efficacy in eliminating spurious stationary points.
Beyond this, Theorem 2.7 pays back a debt in the literature. Previous books and papers on ACSV [PW08, PW13] often use Morse-theoretic heuristics to motivate certain constructions, but cannot use Morse theory outright to prove general results. By ruling out stationary points at infinity, those results can be recast as following from the stratified Morse framework.
The remaining sections of the paper, after reviewing applications of ACSV, are organized as follows. Section 2 sets the notation for the study of stratified spaces and stationary points, formulates definitions, and states the main result. Section 3 shows how to determine all SPAI using a computer algebra system. Some examples are given in Section 4. Section 5 proves Theorem 2.7 by constructing Morse deformations from height down to height , remaining in a bounded region provided is empty.
1.4 Applications of ACSV
The techniques of analytic combinatorics in several variables find application to a diverse range of topics in mathematics, computer science, and the natural sciences. We briefly summarize some of these applications here; anyone wanting more information can consult, for instance, Pemantle and Wilson [PW08, PW13] or Melczer [Mel21].
Quantum Random Walk: Since their introduction in the early 1990s [ADZ93], quantum variants of random walks have been studied as a computational tool for quantum algorithms (see the introduction of Ambainis et al. [ABN*+*01] for a listing of quantum algorithms based around quantum random walks, for example). Results obtained by ACSV go well beyond what has been obtained by other methods such as orthogonal polynomials or the univariate Darboux method [CIR03]. In particular, ACSV may be used to analyze one-dimensional quantum walks with arbitrary numbers of quantum states [BGPP10] and families of quantum random walks on the two-dimensional integer lattice [BBBP11]. Both of these results involve ad hoc geometric arguments which may be streamlined based on the results of the present paper.
Example 1**.**
As described in Bressler and Pemantle [BP07], the analysis of quantum random walks on the one-dimensional integer lattice can be reduced to studying asymptotics of coefficients
[TABLE]
where is a parameter depending on the underlying probabilities used to transition between different states in the walk and is a polynomial which depends on the initial state of the system. In particular, for given one wishes to determine the asymptotic behaviour of the sequence as . A short argument about the roots of implies where ; the values of such that form the feasible region of study while the values of with , where exponentially decays, form the nonfeasible region. For any values of the height function with has two stationary points. Previously, to determine asymptotic behaviour one needed to check which of these stationary points were in the domain of convergence of , a computationally difficult task that requires arguing about inequalities involving the moduli of variables in an algebraic system with parameters. Running our Maple implementation of Algorithm 1 shows that has no stationary points at infinity, meaning Theorem 2.18 applies and asymptotics of can be written as an integer linear combination of two explicitly known asymptotic series. In particular, when then both stationary points are on the unit circle and our results immediately imply that must be in the feasible region. Similarly, if it can be shown that is not in the feasible region. Although our results ease the derivation of previously known results in this instance, they also allow for the derivation of results outside the scope of previous methods (see, for instance, Example 6 below).
Queuing Theory and Lattice Walks: Queuing theory–the study of systems in which items enter, exit, and move between various lines–arises naturally in computer networking, telecommunications, and industrial engineering, among other areas. Often, one can derive multivariate generating functions describing the state of a system at point in time, then derive desired information about the underlying model through an asymptotic analysis. Such analyses, using analytic combinatorics methods to analyze queuing models, can be seen in Bertozzi and McKenna [BM93] and Pemantle and Wilson [PW08, Section 4.12], for instance. These systems can often be modeled by (classical) random walks on integer lattices subject to various constraints [FIM99, Ch. 9 & 10], an enumerative problem for which the methods of ACSV are extremely effective [Mel21].
RNA Secondary Structure: The secondary structure of a molecule’s RNA, describing base pairings between its elements, encodes important information about the molecule, and predicting such structure is a well-studied topic in bioinformatics. One approach to secondary structure prediction uses stochastic context-free grammars to generate potential pairings; this approach is implemented in the popular Pfold program of Knudsen and Hein [KH99]. To analyze Pfold, Poznanović and Heitsch [PH14] used multivariate generating functions tracking the probability that certain biological features arise. Using classical methods in analytic combinatorics, those authors found distributions for single features (the numbers of base pairs, loops and helices generated by a grammar). Their central limit theorems rely on results of Flajolet and Sedgewick, quoted as [PH14, Thoerem 4.1], whose hypotheses can be replaced by more checkable multivariate hypotheses once one has our Theorem 2.7 below. More recently, Greenwood (see [Gre18] and a forthcoming extension) used ACSV to analyze the probability that certain combinations of features appear. Greenwood’s hypotheses in his Theorem 1 and Corollary 2 can be weakened and much more easily checked with the Morse-theoretic tools in the present paper.
Sequence alignment: The problem of optimally aligning more than two sequences on a finite alphabet is fundamental to the study of DNA and known in several ways to be mathematically intractable. In [PW08, Section 4.9] several cases are analyzed using techniques of ACSV. At the time of that paper, ACSV could only handle cases where the dominant singularity was at a stationary point all of whose coordinates were known, via Pringsheim’s Theorem, to be real. Morse theory allows us in principle to handle further biologically relevant cases.
2 Definitions and results
2.1 Spaces, stratifications and stationary points
Throughout the remainder of the paper, is a polynomial and is the algebraic hypersurface . The elements of with non-zero coordinates is denoted .
2.1.1 Whitney stratifications
The following definitions of stratification and Whitney stratification are taken from [Har75, GM88]. A stratification of a space is a partition of into finitely many disjoint sets such that each stratum is a real manifold444In fact our strata are always complex manifolds and complex algebraic sets, however this is not required in the definition of a stratification. of some dimension at most . We consider here only algebraic stratifications, meaning that each stratum is an algebraic set, potentially with an algebraic set of lower dimension removed. A Whitney stratification furthermore satisfies the following conditions.
If a stratum intersects the closure of another, then it lies entirely inside: . 2. 2.
Whitney’s Condition B on tangent planes and secant lines of the strata should hold; because we make use only once of this condition and never need to check it, we refer readers to [GM88, Chapter 1.2] for the definition.
A stratification of the pair is a Whitney stratification of in which the only -dimensional stratum is . When is a complex algebraic variety, such a stratification always exists.
Logarithmic space, natural Riemannian metric, tilde notation
Let denote the one-dimensional torus. We introduce the logarithmic space (logspace) together with the exponential diffeomorphism defined for and by
[TABLE]
We refer to as the real coordinates on the logspace. Mostly we do not need logspace until Section 5, though we refer to coordinates and occasionally. The reason for using both and the logspace is that deformations and other geometric constructions are more transparent in but that polynomial computations via computer algebra involving must be carried out in .
Directions and affine stationary points
A direction is an equivalence class of vectors in under positive multiples. The direction containing the nonzero vector can be canonically identified with the unit vector . Fix a direction . The phase function from (1.2) is given in logspace by the linear function . stationary points of on any complex-analytic submanifold of are therefore the same as stationary points of a branch of .
Fix a stratification of . For a stratum , we define an affine -stationary point as a stationary point of the restriction of to . These points are what is referred to in ACSV literature as critical points; we call them affine stationary points, in contrast to SPAI, which are stationary points at infinity.
Stationary point relation
Given a stratum , a point and a direction , a necessary and sufficient condition for to have a stationary point at is a drop in the rank of a certain matrix of differentials. To make this more precise, choose a neighborhood of in which the closure of is locally cut out by independent polynomials, where is the codimension of ,
[TABLE]
The stratum may be obtained by intersecting with a set of polynomial non-equalities to remove points in substrata. By refining the stratification if necessary, we can assume that the polynomials and define the whole stratum and that the differentials are linearly independent everywhere on . For any point and vector , let denote the matrix with entries
[TABLE]
Note that after dividing the th column of by its rows become the gradients together with the scaled gradient . The rank of is invariant under the map for any non-zero , thus we define a binary relation which we interpret as lying in the normal space to at .
Definition 2.1** (binary relation for stationary points).**
Define by if and only if .
Proposition 2.2**.**
Let be a stratum and suppose and is real. then if and only if is a critical point of the height function on the stratum .
Proof: The tangent space to a stratum defined by analytic functions is a complex linear subspace of . The function is the real part of a (branched) analytic function . It follows that the vanishing of on the real part of the complex tangent space is equivalent to its vanishing on all of , which is equivalent to the vanishing of on all of . Vanishing of the complexified height is equivalent to being in the complex normal space, which is equivalent to the rank being at most of any basis for the normal space, together with the vector . ∎
Stationary points at infinity
Definition 2.3** (SPAI).**
Let denote the closure of when embedded in . Define a SPAI in direction to be an element where , meaning either lies in the plane at infinity or has at least one vanishing coordinate. A witness to the SPAI is a sequence in converging to .
Definition 2.4** (ternary relation for heighted stationary points).**
Fix a direction . Let denote the set of triples such that the following three conditions hold.
- (i)
* ;* 2. (ii)
, where is the co-dimension of ; 3. (iii)
.
Projecting to the first two coordinates yields .
Definition 2.5** (H-SPAI).**
Let denote the closure of in . A triple with is called an H-SPAI in in direction and is said to have height . A witness for the H-SPAI is a sequences in converging to .
We say that the real number is a generalized stationary value of on the stratum if either it is an affine stationary value (that is, a stationary value of ) or else it is the third coordinate of some H-SPAI. We denote the set of stationary values by .
Definition 2.6** (stationary points in an interval).**
Fix and fix . The coordinates of all stationary points on with heights in form the set
[TABLE]
Omitting the argument or denotes a union over all strata and taking , respectively. We write for the elements of which are affine stratified points and for the remaining elements.
Remark 1*.*
Because we sometimes need to refine stratifications, we note that refining the stratification can introduce more stationary points, affine or infinite, but cannot remove any.
2.2 Main topological results
For any space with height function and any real , we define . We first state our main deformation result, an extension to the nonproper setting of well known stratified Morse theoretic results for proper height functions.
Theorem 2.7** (Morse deformation).**
Fix , , and a Whitney stratification of . Fix also a direction and height function .
- (i)
Suppose is empty. Then for any stratum , and . 2. (ii)
Suppose with for all . Then for any stratum , any chain supported on is homotopic in to a chain supported on the union of together with arbitrarily small neighborhoods of the points in . Taking , it follows that every homology class in is represented by a cycle supported on this union.
Remark 2*.*
This theorem draws no conclusion about whether the topology of or can be deduced from the topology near the stationary points, only stating that certain needed deformations exist. In fact, all the topological information necessary to estimate the Cauchy integrals is present in the relative homology group for some sufficiently large , hence the topology of at sufficiently low heights is irrelevant.
The purpose of these homotopy equivalences is to push the cycle of integration down to one whose maximum height is as low as possible. For example, because the cycle in the Cauchy integral of interest can be pushed down at least until hitting the first stationary point corresponding to direction , the magnitude of coefficients in direction is bounded above by the Cauchy integral over a contour at this height. The following corollary of Theorem 2.7 was given only as a conjecture in [PW13] because it was not known under what conditions could be pushed down to the stationary height.
Corollary 2.8**.**
Fix and a Laurent polynomial and Laurent expansion . Suppose is finite for all strata and denote the maximum stationary value by . Then
[TABLE]
More generally, we would like to examine how a cycle in can be represented as the sum of cycles, each of which has been pushed down until reaching an obstacle at some stationary height. In the case where is proper, this is a classical result of Morse theory (when is smooth) or more generally of stratified Morse theory. We briefly recall the relevant Morse theoretic notions.
Let be a proper smooth function on a stratified space . Suppose that has finitely many (stratified) stationary points . For ease of exposition, assume the stationary values are distinct. Let denote the pair where is sufficiently small. The relative homology group is called the attachment group at . Stratified Morse theory guarantees that the attachment pairs generate all the homology of . For example, the following proposition is well known (see, e.g., [PW13, Section B.2]).
Proposition 2.9** (attachments generate homology: proper case).**
- (i)
Every integer homology class can be written as a finite integer combination of classes projecting to a nonzero class in . 2. (ii)
Let be the image of under the projection from to , that is, those relative homology classes representable by absolute cycles. If is the homological dimension of then . 3. (iii)
When is a smooth -manifold and is harmonic, each attachment group is a homology -sphere, each is is the whole attachment group and .
Proof: The first statement follows from the homotopy equivalence between and (because Theorem 2.7 always holds for proper height functions) and the standard Morse filtration. The second statement follows from the long exact sequence for the pair and the vanishing of . The third follows because attachments in smooth Morse theory are -balls modulo their boundaries, where is the index of the stationary point. ∎
Remark 3*.*
When the stationary values are not distinct one may add in the balls one at a time, arriving at the same result.
Our main topological result is that all of this holds for the nonproper height function unless obstructed by stationary points at infinity.
Theorem 2.10** (attachments generate homology: general case).**
Fix , , and a Whitney stratification of . Fix also a direction and let be the affine stationary points with nonincreasing. Let be the spaces from above, with .
- (i)
Suppose , that is, there are no H-SPAI. Then where are the relative cycles in represented by absolute cycles. 2. (ii)
Suppose is nonempty, having maximum element . Let the be the stratified values as above, with chosen so that . Then any class may be written as where for and is supported on .
Proof: Part follows from Theorem 2.7 and Proposition 2.9 by deforming each to . Part follows by performing the deformations only down to . ∎
Theorem 2.10 says that in Steps I–III of the asymptotic coefficient evaluation from Section 1.1 the only integrals that need to be evaluated are integrals over classes in each . In general, these attachment classes are the best places to integrate. For example, as mentioned above, if a stationary point is a smooth point of then will have a single generator which is a saddle point contour and an asymptotic expansion can be deduced automatically.
We also remark that the direct sum in part and the expansion of in part are not natural. Elements of are equivalence classes modulo for all , and correspondingly in part is determined only modulo linear combinations of for . However, the pair is well defined, where is the least index for which (in part , the least among ).
In the remainder of Section 2 we expand on our underlying motivations, describing the application of Theorems 2.7 and 2.10 to the computation of cycles, integrals over these cycles, and coefficient asymptotics of multivariate rational functions. These results, collected from various prior and simultaneous works, can be skipped if one is only interested in examples, proofs and computations of stationary points at infinity.
2.3 Intersection classes on smooth varieties
We assume throughout this section that is smooth. It is useful to be able to transfer between and : topologically this is the Thom isomorphism and, when computing integrals, corresponds to taking a single residue. We outline this construction, which goes back at least to Griffiths [Gri69]. Because does not vanish on , the well known Collar Lemma [MS74, Theorem 11.1] states555See [Lan02] for a full proof. that an open tubular vicinity of is diffeomorphic to the space of the normal bundle to .
It follows that for any -chain in we can define a -chain , obtained by taking the boundary of the union of small disks in the fibers of the normal bundle. The radii of these disk should be small enough to fit into the domain of the collar map, but can (continuously) vary with the point on the base. Different choices of the radii matching over the boundary of the chain lead to homologous tubes. We will be referring to informally as the tube around . Similarly, the symbol denotes the product with the solid disk. The elementary rules for boundaries of products imply
[TABLE]
Because commutes with , cycles map to cycles, boundaries map to boundaries, and the map on the singular chain complex of induces a map on homology ; we also denote this map on homology by to simplify notation.
Proposition 2.11** (intersection classes).**
Suppose is smooth, and define as above.
- (i)
* is injective and its image is the kernel of the map induced by the inclusion .* 2. (ii)
Given , one may compute the pullback by intersecting with any -chain in whose boundary is , and for which the intersection with is transverse.
Specializing to where and are two -cycles in homologous in , we call the intersection class of and .
Proof: The Thom-Gysin long exact sequence implies exactness in the following diagram,
[TABLE]
This may be found in [Gor75, page 127], taking , though in the particular situation at hand it goes back to Leray [Ler50]; here, the first mapping, , denotes the map induced by transverse intersection, . Injectivity of follows from the vanishing of . The rest of part follows from exactness at .
For part , we begin by showing that induces a well defined map from to . Given , because transversality is generic, there exist -chains intersecting transversely whose boundary is . If is such a chain and then is a cycle:
[TABLE]
Let and be two such chains, and denote . Observe that is null homologous because there is no -homology in , whence
[TABLE]
showing that for is well defined in .
Finally, if then taking gives , showing that does in fact invert , hence computes . ∎
2.4 Integration
Integrals of holomorphic forms on a space are well defined on homology classes in . Relative homology is useful for us because it defines integrals up to terms of small order. Throughout the remainder of the paper, denotes a quotient of polynomials except when a more general numerator is explicitly noted. Let denote the amoeba associated to the polynomial , where and are taken coordinatewise666One should think of the amoeba as sitting in -space, the real part of logspace.. Components of the complement of are open convex sets and are in correspondence with convergent Laurent expansions of , each expansion being convergent when and determined by the Cauchy integral (1.1) over the torus for any .
Definition 2.12** ( and the pair ).**
Fix and let denote the infimum of heights of stationary points, both affine and at infinity. Denote by the homology of the pair for any . By part of Theorem 2.7, these pairs are all naturally homotopy equivalent.
For functions of , let denote the relation of differing by a quantity decaying more rapidly than any exponential function of . If consists of vectors whose angle with a fixed is bounded above by , we note for use below that , in other words, and go to at comparable rates on . Homology relative to and equivalence up to superexponentially decaying functions are related by the following result.
Theorem 2.13**.**
Let with rational and holomorphic. Fix and suppose that . For -cycles in , as varies over a set whose angle with is bounded above by , the equivalence class of the integral depends only on the relative homology class of when projected to .
Proof: Fix any . Suppose in . From the exactness of
[TABLE]
observing that projects to zero in , it follows that is homologous in to some cycle . Homology in determines the integral exactly. Therefore, it suffices to show that .
As a consequence of the homotopy equivalence in part of Theorem 2.7, for any there is a cycle supported on and homologous to in . Fix such a collection of cycles . Let and let denote the volume of . Observe that on . It follows that
[TABLE]
Because this inequality holds for all , the integral is thus smaller than any exponential function of . ∎
When is rational we may strengthen determination up to to exact equality for all but finitely many coefficients. The Newton polytope, denoted , is defined as the convex hull of degrees of monomials in . It is known (see, e.g., [FPT00]) that the components of map injectively into the integer points in , and that to each extreme point corresponds a non-empty component. Moreover, this can be done in such a way that the recession cone of a component (collection of directions of rays contained in the component) equals the dual cone of the Newton polytope at the corresponding vertex; see Figure 1. Hence the linear function is unbounded from below on any component when points in the same direction as any element of the dual cone of the Newton polytope at the corresponding integer point. Fix the component corresponding to the Laurent expansion and integer point in the Newton polytope. The closed dual cones at extreme points of the Newton polytope cover all of , therefore there exists a component of the amoeba complement (probably many components would do) with linearly in as in .
Proposition 2.14**.**
Let denote the centered torus with polyradii . If is rational and , then
[TABLE]
for all but finitely many , the support of the Laurent expansion on .
Proof: By assumption, there is a continuous path moving to infinity within . On the corresponding tori, the (constant) value of approaches . Let denote such a torus supported on . Because the tori are all homotopic in , the value of the integral
[TABLE]
cannot change. On the other hand, with and as in the proof of the first part, both and are bounded by polynomials in , the common polyradius of points in . Once any coordinate is great enough so that the product of the volume and the maximum grows more slowly than the integral for that fixed goes to zero as , and thus is identically zero. ∎
The utility of Proposition 2.14 is to represent the Cauchy integral as a tube integral. Let for , the component of defining the Laurent expansion, and choose for as in Proposition 2.14. By Proposition 2.11, if denotes the intersection class , we have in . By Proposition 2.14, the integral over vanishes for all but finitely many , yielding
Corollary 2.15**.**
If is rational and is smooth, then there exists a -cycle of integration in such that for all but finitely many ,
[TABLE]
∎
2.5 Residues on smooth varieties
This section again assumes that is smooth. Having transferred homology from to via intersection classes, we transfer integration there as well via residues. The point of this is to obtain integrals amenable to a saddle point analysis: pushing down cycles until their maximum height is minimized drives the maximum to occur on , not on . Thus we need a reduction to saddle point integrals on rather than on . In what follows, denotes the holomorphic de Rham complex, whose -cochains are holomorphic forms. The following duality between residues and tubes is well known.
Proposition 2.16** (residue theorem).**
There is a functor such that for any class and every ,
[TABLE]
The residue functor is defined locally and, when is squarefree, it commutes with products by any locally holomorphic scalar function. If, furthermore, is rational, there is an implicit formula
[TABLE]
For higher order poles, the residue can be computed by choosing coordinates: if , and locally defines a graph of a function, , then
[TABLE]
Proof: Restrict to a neighborhood of the support of the cycle in the smooth variety coordinatized so that the last coordinate is . The result follows by applying the (one variable) residue theorem, taking the residue in the last variable. ∎
Applying this to intersection classes and using homology relative to to simplify integrals yields the following representation.
Theorem 2.17**.**
Let be the quotient of Laurent polynomials with Laurent series converging on when , where is a component of . Fix and assume the minimal stationary value is finite and is empty. Let denote a component of the complement of on which goes linearly to , as constructed prior to Proposition 2.14. Then for any and ,
[TABLE]
for all but finitely many . If is replaced by any holomorphic function then the same representation of holds up to a function decreasing super-exponentially in .
Proof: If is polynomial then, for all but finitely many ,
[TABLE]
The first line above is Cauchy’s integral formula, the second is Proposition 2.11, and the third is Corollary 2.15 or Proposition 2.14. By the Residue Theorem,
[TABLE]
proving the theorem when is a polynomial. When is not polynomial, use Theorem 2.13 in place of Proposition 2.14 in the last line. ∎
Combining Theorems 2.10 and 2.17 yields the most useful form of the result: a representation of the coefficients in terms of integrals over relative homology generators produced by the stratified Morse decomposition. In the following theorem we remove the assumption that is smooth, though we still use residues at the smooth points.
Let enumerate the stationary points of in weakly decreasing order of height . For each , denote the relevant homology pair by
[TABLE]
where is a sufficiently small ball around in . Let and let denote cycles in that project to a basis for with integer coefficients.
In the case where is a smooth point of , stratified Morse theory [GM88] implies that and is a cycle agreeing locally with a tube around the unstable manifold for the downward gradient flow on . This leads to the following decomposition for .
Theorem 2.18** (stratified Morse homology decomposition).**
Let be rational. Fix , assume is empty, and enumerate the affine stationary points as above. Then there are integers such that
[TABLE]
When is a smooth point of , then , the cycle agrees locally with a tube around the unstable manifold at for the downward gradient flow of on and the corresponding summand in (2.9) is given by
[TABLE]
Theorem 2.18 is the culmination of this Section, and provides a crucial (and highly desired) tool for analytic combinatorics in several variables. Let be the least for which some is nonzero. Generically the dominant asymptotic term is then the sum of the terms in (2.9) with and . The full expansion has several benefits over a statement of the leading term only. First, one might not know . In fact in [BMP19], the asymptotics of the diagonal coefficients are settled only by computing all the residue integrals, then determining the integers via rigorous numerics. Secondly, knowing the subdominant terms allows one to compute error estimates in the case where the exponential rates are very close or are converging to one another. Thirdly, sometimes is generated by a local cycle, supported in an arbitrarily small neighborhood of . This is a natural choice for , whence the next asymptotic terms are meaningful. Fourthly, one may want a trans-series expansion of , for which the contributions of all orders are needed.
3 Computation of stationary points at infinity
We begin by recalling some background about stratifications and affine stationary points.
Computing a stratification
To compute stationary points one requires a stratification. Often, there is an obvious stratification; for example, polynomial varieties are generically smooth, in which case the trivial stratification suffices777Formally one must join with the stratification generated by the coordinate planes, so smooth manifolds intersecting coordinate subspaces nontransversely (which again, is non-generic) might require refinement. In non-generic cases, however, one must produce a stratification of before proceeding with the search for stationary points.
There are two relevant facts to producing a stratification. One is that there is a coarsest possible Whitney stratification, called the canonical Whitney stratification of . It is shown in [Tei82, Proposition VI.3.2] that there are algebraic sets such that the set of all connected components of for all forms a Whitney stratification of and such that every Whitney stratification of is a refinement of this stratification. This canonical stratification is effectively computable: an algorithm exists, given , to determine generators for the radical ideals corresponding to the Zariski closed sets .
Mostowski and Rannou [MR91] give an algorithm to compute stratifications using quantifier elimination, leading to a bound on the computation time which is doubly exponential in ; an alternative algorithmic approach is presented in [DJ21, Section 2]. In our experience, the large doubly-exponential upper bound is somewhat more pessimistic than what one has to deal with on actual combinatorial examples.
Computing the affine stationary points
Assume now that a Whitney stratification is given, meaning the index set is stored, along with, for each , a collection of polynomial generators for the radical ideal . The set is the algebraic set minus the union of varieties of higher codimension. Potentially by replacing with its prime components, we may assume that the tangent space of at any smooth point has constant codimension . After computing the canonical Whitney stratification, recall that we refine if necessary to ensure that the defining ideal for each stratum of co-dimension has generators with linearly independent differentials at every point.
By Definition 2.4 the set of affine stationary points in the direction is defined, after removing points in varieties of higher codimension, by the ideal containing the polynomials together with the minors of . Taking the union over all strata produces all the affine stationary points. This description simply restates the so-called ‘critical point equations’ given in [PW13, (8.3.1-8.3.2)], or, in the common special case of a stratum of co-dimension one, more explicitly by (8.3.3) therein.
For the fixed integer vector and height interval , the inequalities impose further semi-algebraic constraints. Unfortunately, these increase the complexity considerably and behave badly under perturbations of the integer vector . If one can compute open cones of values of in which the structure of the computation does not change, one can then pick a single in the cone to minimize complexity, making for a feasible computation. Otherwise, one must settle for computations based on a fixed direction .
Computing stationary points at infinity
To determine whether there exist stationary points at infinity we use ideal quotients, corresponding to the difference of algebraic varieties. Recall that the variety defined by the saturation of two ideals and is the Zariski closure of the set difference (see [CLO92, Section 4.4]), and can be determined through Gröbner basis computations.
Definition 3.1** (saturated stationary point ideal ).**
For a stratum let be the projective ideal defining . In other words, taking the homogenizing variable to be , the ideal is generated by the homogenizations in the variables of both and the minors of .
Let denote the ideal generated by and the homogenizations of all polynomials in strata of higher codimension .
Define to be the result of saturating by the ideal .
Geometrically, the variety is the Zariski closure of , that is, the closure of that part of the graph of the relation in corresponding to points whose component is not on a substratum and not at infinity (including the coordinate planes). Note that in this setting, the Zariski closure equals the classical topological closure [Mum76, Theorem 2.33].
Definition 3.2** (saturated ideals).**
Fix a stratum .
Let denote the result of substituting in .
Let denote the result of substituting in .
The variety finds all SPAI. The variety finds all SPAI in a given direction , that is, all limits of affine points in with . This is stated in the following proposition, whose proof follows directly from our definitions.
Proposition 3.3** (computability of stationary points at infinity).**
- (i)
The rational function has SPAI if and only if for some there is a projective solution to , in other words, a solution other than . 2. (ii)
The rational function has SPAI in direction if and only if for some there is a projective solution to .
∎
Proposition 3.3 computes a superset of what we need: SPAI regardless of height. We only care about those at finite heights, indeed heights above the least affine stationary value. Unfortunately, we do not know a way to automate the height computation, which is not polynomial; doing so is an interesting problem for further research.
Problem 1**.**
Find an effective way to compute , for irrational or as a symbolic computation in .
When is rational, we can do a little better. In this case the height(s) may be computed from the start along with the stationary points themselves because the exponentiated heights are polynomial. This gives the following corollary, whose use is illustrated in the upcoming examples.
Corollary 3.4**.**
Let be an integer vector. Introducing one more variable , let denote the ideal generated by along with . Let be the result of saturating by , let be the result of substituting , and let be the result of further substituting . Then there exists a H-SPAI of height in direction if and only if there is a solution to with -coordinate equal to .
4 Examples
When is square-free and is smooth, itself forms a stratification. The pseudocode in Algorithm 1 computes stationary points at infinity in this case (the pseudocode in Algorithm 2 computes stationary points at infinity in the general case but requires the algebraic sets defining the canonical Whitney stratification of as input). We have implemented this algorithm, and more general variants, in Maple. A Maple worksheet with our code and examples is available from ACSVproject.org (search for this paper) and the authors’ webpages.
We give three examples in the smooth bivariate case, always computing in the main diagonal direction and examining the coefficients of . In the first example there is no affine stationary point; it follows that there must be a stationary point at infinity which determines the exponential growth rate. In the second there are both stationary points at infinity and affine stationary points, with the stationary point at infinity being too low to matter. In the third, the stationary point at infinity is higher than all the affine ones and controls the exponential growth rate of diagonal coefficients.
Example 2** (smooth case, stationary point at infinity).**
Let , so that is smooth and we can use the above code for the diagonal direction . First, an examination of the polynomial system shows there are no affine stationary points. Thus, if there were no stationary points at infinity then the diagonal coefficients of would decay super-exponentially. It is easy to see that this does not happen, for example by extracting the diagonal. This may be done via the Hautus-Klarner-Furstenberg method [HK71, BDS17], giving .
We compute the existence of stationary points at infinity in the diagonal direction using our Maple implementation via the command
SPatInfty(2 - xy^2 - 2x*y - x + y , [1,1])
This returns the ideal
[(H - 1)^2 , Z, y (H - 1), x ]
where is the homogenizing variable, meaning the projective point is a stationary point at infinity, which has height . The stationary point at infinity is a topological obstruction to the gradient flow across height 0, pulling trajectories to infinity; it suggests that the diagonal power series coefficients of do not grow exponentially nor decay exponentially (in fact they decay like a constant times ). Further geometric analysis of this example is found in [DeV11, pages 120–121].
Example 3** (highest stationary point is affine).**
Let . To look for stationary points at infinity in the diagonal direction, we execute SPatInfty(Q,[1,1]) to obtain the ideal
[(H + 1)(4H^2 + 4H - 1), Z, y(H + 1), x]
showing that is a stationary point at infinity at height . This time, there is an affine stationary point of greater height. This affine point is easily seen to be a topological obstruction and therefore controls the exponential growth. Theorem 2.17 allows us to write the resulting integral as a saddle point integral in over a class local to , thereby producing an asymptotic expansion with leading term .
Example 4** (stationary point at infinity dominates affine points).**
Let . This time SPatInfty(Q,[1,1]) produces
[(2 H^4 - 11 H^3 + 171 H^2 - 1382 H + 3220) (H-1)^2, Z, y (H-1), x]
Again, because and cannot both vanish, the only height of a stationary point at infinity is . There are four of affine stationary points: a Gröbner basis computation produces one conjugate pair with and another conjugate pair with . Both of these lead to exponentially decreasing contributions, meaning the point at infinity could give a topological obstruction for establishing asymptotics. If there is an obstruction, it would increase the exponential growth rate of diagonal coefficients from to no exponential growth or decrease. To settle this, we can compute a linear differential equation satisfied by the sequence of diagonal coefficients. This reveals that the diagonal asymptotics are of order , meaning the exponential growth rate on the diagonal is in fact one.
Example 5** (dominant asymptotics with no SPAI).**
If then running SPatInfty(Q,[1,1,1]) shows there are no SPAI. The two affine stationary points are computed easily,
[TABLE]
so Theorem 2.18 implies
[TABLE]
where and are respectively the downward gradient flow arcs on at and . Saddle point integration gives an asymptotic series for each, the series for dominating the series for , yielding an asymptotic expansion for beginning
[TABLE]
The following application concerns an analysis in a case where is not smooth. There is an interesting singularity at and a geometric analysis involving a lacuna [BMP19], which depends on there being no stationary points at infinity at finite height. This example illustrates shows the full power of the results in Sections 2.3 – 2.5.
Example 6** (application to GRZ function).**
In [BMPS18], asymptotics are derived for the diagonal coefficients of several classes of symmetric generating functions, including the family of 4-variable functions attributed to Gillis, Reznick and Zeilberger [GRZ83]. The most interesting case is when the parameter passes through the stationary value 27: diagonal extraction and univariate analysis show the exponential growth rate of the main diagonal to have a discontinuous jump downward at the stationary value [BMPS18, Section 1.4]. This follows from Corollary 2.8 if we show there are in fact no stationary points at infinity above this height. Here there is a single point where the zero set of is non-smooth, the point . Running Algorithm 1 with the modification to remove the single non-smooth point yields the ideal [Z,z^4,-z+y,-z+x,-z+w] which has only the trivial solution . Thus, there is no stationary point at infinity for the diagonal direction.
There are three affine stationary points, one at , one at and one at , where . Call these points , , and . The stationary point with the greatest value of (in the main diagonal direction) is , which has height . The other stationary points both have height . By a somewhat involved topological process, it is checked in [BMP19] that in , where is a small ball centered at . Crucially for the analysis after that, it follows from Proposition 2.10 that is homologous to a chain supported in . In other words, can be pushed down until hitting obstructions at and . In fact an alternative analysis using a differential equation satisfied by the diagonal verifies a growth rate of , not . By means of Theorem 2.17, the coefficients may be represented as a residue integrals and put in standard saddle point form. When this is done, one obtains the more precise asymptotic . The value of depends on geometric invariants (curvature) and topological invariants (intersection numbers) and can be deduced by rigorous numeric methods. Details are given in [BMP19, Section 8].
We end with a three-dimension example with SPAI that are irrelevant for asymptotics.
Example 7** (irrelevant SPAI in three dimensions).**
Consider the diagonal direction and
[TABLE]
There are two affine stationary points, Running our algorithm shows there is also a stationary point at infinity of height . Since the height of is , the stationary point at infinity does not affect dominant asymptotics of . One can get a mental picture of the situation by examining the Newton polytope of . Due to the monomials and , the dual cone of the Newton polytope at the origin is the negative orthant. Thus, the component of corresponding to the power series expansion of admits the negative orthant as its recession cone. This implies one cannot move along a direction perpendicular to and stay in , so the stationary point at infinity comes from other components of the amoeba complement. In fact, the stationary point at infinity lies on the closure of the complements of corresponding to the vertices and of the Newton polytope of ; it can be directly verified that both of these components have a recession cone containing a vector normal to the diagonal direction. Ultimately, the lack of a stationary point at infinity of highest height implies an asymptotic expansion of the diagonal of beginning
[TABLE]
5 Proof of Theorem 2.7
In the log-space, the phase function becomes the linear function mapping to . We denote by the tangential differential, meaning the restriction of the differential of the phase function (in log space) to the tangent space to at the point .
Lemma 5.1**.**
Assume that for some real interval . Then for every neighborhood of , there is a such that
[TABLE]
at every affine point whose height is in the interval . In particular, if there are no affine stationary points then is globally at least for some .
Proof: It suffices to prove this separately for each of the finitely many strata. We may therefore fix and . Also fixing , we let denote the intersection of a stratum in the log space with the set of points having heights in . Assume towards a contradiction that the norm of the tangential differential is not bounded from below on where is a neighborhood of in the log space. Let be a sequence in for which the left-hand side of (5.1) goes to zero; this sequence has no limit points whose height lies outside of and no limit points in . There are also no affine limit points outside of ; this is because if with in a stratum then , since the projection of the differential onto a substratum is at most the projection onto .
By compactness must have a limit point . It follows from ruling out noncritical points, and affine stationary points with heights inside or outside of , that . Passing to a subsequence if necessary, converges to a point . The differential of the phase on the log space is the constant co-vector . Therefore, convergence of the norm of the tangential projection of the differential to zero is equivalent to the projection of onto the normal space to at converging to (here we make repeated use of the identification of normal spaces to the phase function at different points of log-space). The points have thus been shown to converge to . Furthermore, each is in due to the choice of as a nonzero vector in the normal space to at . The sequence is therefore a witness to a stationary point at infinity of height , contradicting the hypothesis and proving the lemma. ∎
Recall from [Mat12, Section 9] the notion of a stratified vector field. Given a Whitney stratification of , a stratified vector field is defined to be a collection of smooth sections of . Greatly summarizing Sections 7 and 8 of [Mat12], a stratified vector field is said to be controlled if for any strata ,
- (i)
where is the squared distance function to in a given local product structure, and 2. (ii)
projection from to in this local product structure maps to .
Proposition 9.1 of [Mat12], with , and the constant vector field on , says that there is a controlled lift of to , that is a controlled stratified vector field mapping by to . This will be almost enough to prove Theorem 2.7. What we need in addition is a uniform bound on . Although Mather (and Thom before him) was not interested in bounding (indeed, their setting did not allow a meaningful metric), his proof in fact gives such a bound, as we now show.
Lemma 5.2**.**
Let be real and suppose is a Whitney stratification of for which there are no finite or infinite stationary points with heights in . Assume a given set of projections and distance functions satisfying the control conditions of [Mat12, Sections 7-8]. Then there is a vector field in the log space, in other words a section of , over the base set , with the following properties.
- (i)
control: is a controlled stratified vector field for the stratum . 2. (ii)
unit speed: . 3. (iii)
regularity: is bounded.
Before beginning the proof we motivate with a shorter argument that does not quite hold water. By Lemma 5.1, the negative unit gradient vector field on each stratum has magnitude at least . For each point in a stratum , take a neighborhood in intersecting no lower dimensional strata and for which extends continuously to a vector field for which . Piece these together with a partition of unity. By convexity the resulting vector field has norm at most 1 everywhere. By linearity everywhere. This is the natural argument. The gap is that the local product structure does not, on the surface, guarantee a bounded continuous extension of . This must be argued; however as mentioned above, it follows from Whitney’s conditions and is implicit in Mather’s arguments.
Proof: By Lemma 5.1, the tangential differential is globally bounded from below by some positive quantity . Hence, the hypotheses of [Mat12, Proposition 9.1] are satisfied with and the given Whitney stratification, , and the negative unit vector field on . Following the proof of [Mat12, Proposition 9.1], which already yields conclusions and of the lemma, the only place further argumentation is needed for boundedness and continuity is at the bottom of page 494. There, is constructed inductively given on all strata of lower dimension. The word “clearly” in the third line from the bottom of page 494 hides some linear algebra which we now make explicit.
We assume that and are strata, with and . First we straighten near a point . In a neighborhood of in the ambient space there is a smooth coordinatization such that maps to . Applying another linear change of coordinates if necessary, we can assume that . This requires a distortion of magnitudes of tangent vectors by at the point ; taking small enough, we can assume that the distortion on the tangent bundle over is bounded by twice this, hence globally by at most .
Whitney’s Condition A stipulates that as converges to a point , any limit -plane of a sequence must contain . This implies for that the distance of to goes to zero (recall we have identified the tangent spaces for different ). Hence, for there are vectors going to zero as , such that . These vectors may be chosen as smooth functions of , continuously as ; this follows because the tangent planes vary continuously with and semicontinuously as , meaning that is contained in the liminf of . The vectors are linearly independent for because their projections to the first coordinates are linearly independent; hence they may be completed to a basis of .
Let be a sequence of points in converging to . Write as with in local coordinates and . Apply Whitney’s Condition B applied to the sequences in and in . Passing to a subsequence in which and , Whitney’s Condition B asserts that . Because , it follows that the distance between and goes to zero. Hence there is a sequence in as such that for all . Because , it follows that we may choose the basis so that .
Now we have what we need to construct a controlled vector field on that is controlled and close to . In fact we can construct one that is spanned by using linear algebra. Write
[TABLE]
Guessing at the solution, we impose the conditions for . This implies the second control condition, namely that is preserved by projection from to . The first control condition, preservation of distance along the vector field, means that in local coordinates. Thus we arrive at the following system.
[TABLE]
We may write this as where is the identity matrix and smoothly as . Therefore, in a neighborhood of in , the solution exists uniquely and smoothly and converges to as . This allows us to extend from to a controlled vector field in a neighborhood of in , varying smoothly on and extending continuously to , with the properties that and that the norm on is at most a bounded multiple of the norm on .
The solution of the control conditions together with the condition are a convex set; a partition of unity argument as in [Mat12] preserves continuity, and, by the triangle inequality, global boundedness of . ∎
We are now ready to complete the proof of Theorem 2.7.
Proof: [of conclusion of Theorem 2.7] Choose a vector field as in the conclusion of Lemma 5.2. Let be the set , inheriting stratification from the pair . On each stratum of the vector field is smooth and bounded. Let be the space-time domain . Let be a solution to the differential equation
[TABLE]
Such a flow exists on each stratum because because is smooth and bounded, and the phase exit the interval in finite time ; therefore each trajectory stays within a uniformly bounded vicinity of its starting point. Hence, by compactifying the support of the vector field if necessary, the flow exists for the time necessary for the height to drop below from any point of the stratum, and is smooth, hence is well-defined everywhere on the stratum. As in [Mat12, Section 10], the local one-parameter group of time- maps are all injective. Because the flow preserves the squared distance functions to strata, the flow started on a stratum cannot reach a stratum ; hence the time- maps preserve strata. Continuity of the vector field implies continuity of the time- maps.
Extend the flow to by setting for . By construction the flow is tangent to strata, hence the flow is stratum preserving. The flow is continuous because the velocity is bounded and the stopping time is continuous. For any stratum , the flow defines a homotopy within whose final cross section is in . ∎
Proof: [of conclusion of Theorem 2.7] Still in the logspace, for any , let denote the union of closed -balls about the affine stationary points; in particular is the set of stationary points. Due to the presence of affine stationary points, we may no longer invoke the conclusions of Lemma 5.2. We claim, however, that the conclusions follow if is replace by : is bounded and continuous outside any neighborhood of the affine stationary points. This follows from the original proof because the distortions are bounded by constant multiples of the quantities , while by Lemma 5.1 is uniformly bounded away from zero outside any neighborhood of the affine stationary points. Fix the vector field satisfying conclusions and of Lemma 5.2 and above and let be an upper bound for outside of .
We build a deformation in two steps. Fix and set . Next, apply Lemma 5.2 with in place of , which we can do because there are no stationary points with heights in . This produces a deformation retract of to .
Now we compose this with a slowed down version of . The hypotheses of no affine or infinite critical values in other than at imply the same hypotheses hold over a slightly large interval . Let be a smooth nondecreasing function equal to 1 on and 0 on . Define the vector field on by
[TABLE]
where denotes distance. Because defines a flow, so does , the trajectories of which are precisely the trajectories of slowed down inside and below height . Note that the trajectories of stop completely inside and below height , however, trajectories not in these regions slow down so as never to reach nor height .
Run the flow defined by at time . Let be any stratum and let be any point in . Let be the trajectory started from (the trajectory remains in because is a controlled stratified vector field). We claim that the time- map takes to a point in . Because is arbitrary, this is enough to prove theorem. The flow decreases height, so we may assume without loss of generality that . If the trajectory never enters then height decreases at speed 1, hence and the claim follows. If the then trivially the claim is true. Lastly, suppose the trajectory enters and leaves again. Let be the last time that . Because , we have , that is, , finishing the proof of the claim. ∎
6 acknowledgements
The authors would like to thank Paul Görlach for his advice on computational methods for determining stationary points at infinity, to Justin Hilburn for ideas on the proof of the compactification result and to Roberta Guadagni for related conversations. The authors also thank anonymous referees for pointing out related results from the literature and helping to clarify and simplify our arguments.
Appendix A Appendix
We now give an abstract answer to [Pem10, Conjecture 2.11], in a manner suggested to us by Justin Hilburn and Roberta Guadagni. Let be the monomial function on , and , its graph. An easy case of toric resolution of singularities (see, e.g., [Kho78]) implies the following result.
Theorem A.1**.**
There exists a compact toric manifold such that embeds into it as an open dense stratum and the function extends from this stratum to a smooth -valued function on .
Proof: The graph is the zero set of the polynomial on , where is the coordinate on the second factor. Theorem 2 in [Kho78] implies that a compactification of in which the closure of is smooth exists if the restrictions of the polynomial to any facet of the Newton polyhedron of is nondegenerate (defines a nonsingular manifold in the corresponding subtorus). In our case, the Newton polytope is a segment, connecting the points and , and this condition follows immediately. Hence, the closure of in the compactification of is a compact manifold . We notice that the projection to is an isomorphism on , and therefore compactifies in such a way that lifts to a smooth function on .
Lifting the variety to and taking the closure produces the desired result: a compactification of in a compact manifold on which is smooth. ∎
A practical realization of the embedding requires construction of a simple fan (partition of into simplicial cones with unimodular generators) which subdivides the fan dual to the Newton polytope of . While this is algorithmically doable (and implementations exist, for example in macaulay2), the resulting fans depend strongly on , and the resulting compactifications are hard to work with.
Definition A.2** **(compactified stationary point).
Define a compactified stationary point of , with respect to a compactification of to which extends smoothly, as a point in the closure of such that vanishes at on the stratum , and is not zero or infinite.
Applying basic results of stratified Morse theory [GM88] to directly yields the following consequence.
Corollary A.3** (no compactified stationary point implies Morse results).**
* If there are no stationary points or compactified stationary points with heights in , then is homotopy equivalent to via the downward gradient flow.*
* If there is a single stationary point with critical value in , and there is no compactified stationary point with height in , then the homotopy type of the pair is determined by a neighborhood of , with an explicit description following from results in [GM88].*
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1[ABG 70] M. Atiyah, R. Bott, and L. Gårding. Lacunas for hyperbolic differential operators with constant coefficients, I. Acta Mathematica , 124:109–189, 1970.
- 2[ABN + 01] Andris Ambainis, Eric Bach, Ashwin Nayak, Ashvin Vishwanath, and John Watrous. One-dimensional quantum walks. In Proceedings of the Thirty-Third Annual ACM Symposium on Theory of Computing , pages 37–49. ACM, New York, 2001.
- 3[ADZ 93] Y. Aharonov, L. Davidovich, and N. Zagury. Quantum random walks. Phys. Rev. A , 48:1687–1690, Aug 1993.
- 4[BBBP 11] Yuliy Baryshnikov, Wil Brady, Andrew Bressler, and Robin Pemantle. Two-dimensional quantum random walk. J. Stat. Phys. , 142(1):78–107, 2011.
- 5[BDS 17] Alin Bostan, Louis Dumont, and Bruno Salvy. Algebraic diagonals and walks: algorithms, bounds, complexity. J. Symbolic Comput. , 83:68–92, 2017.
- 6[BGPP 10] Andrew Bressler, Torin Greenwood, Robin Pemantle, and Marko Petkovšek. Quantum random walk on the integer lattice: examples and phenomena. In Algorithmic probability and combinatorics , volume 520 of Contemp. Math. , pages 41–60. Amer. Math. Soc., Providence, RI, 2010.
- 7[BM 93] Andrea Bertozzi and James Mc Kenna. Multidimensional residues, generating functions, and their application to queueing networks. SIAM Rev. , 35(2):239–268, 1993.
- 8[BMP 19] Y. Baryshnikov, S. Melczer, and R. Pemantle. Asymptotics of multivariate sequences in the presence of a lacuna. Preprint, 24 pages , 2019.